基于PLC控制技术的智能车库管理系统设计
2020-09-10 21:23李波
内燃机与配件 2020年17期
李波



摘要:以三菱FX2N系列PLC作为核心控制器,结合机电控制中常用的传感器检测技术、数码显示等基本模块,实现对中小型智能车库管系统的入口放行杆控制模块、出口放行杆模块、剩余车位数显示模块的应用设计。系统主要特点是实现车库系统管理的智能化、自动化,通过集中控制、分块管理功能,实现高效运行,操作简单,运行稳定。
关键词:PLC;传感器;智能化
0 引言
随着社会生产力的不断提高,汽车数量大幅度增长,停车成为人们心中的一大难题,如何高效地进行车库系统的管理成为关键,人们一直在不断更新管理系统的管理方式,力求操作简单,安全稳定,减少不必要的过程资料和手续。应用新的机电技术对设备的更新换代势在必行,PLC作为工控领域的核心控制器,其应用逐步向生活的各个层面蔓延。
PLC具有可靠性高、通用性强、适应面广、抗干扰能力强等特点。在工业自动化领域特别是顺序控制系统中,独树一帜,已成为各个工业控制领域的核心。
1 硬件设计方案
1.1 系统设计总体框图
图1为系统设计总体框图,通过光电传感器对车库入口处车俩、出口处车辆及车位有无车俩进行检测,将检测信号作为PLC的输入信号,通过PLC编程控制,实现车辆放行杆的升降控制,并同时通过LED显示屏显示剩余车位数及空车位坐标显示。
1.2 传感器设计及选型
1.2.1 入口、出口传感器
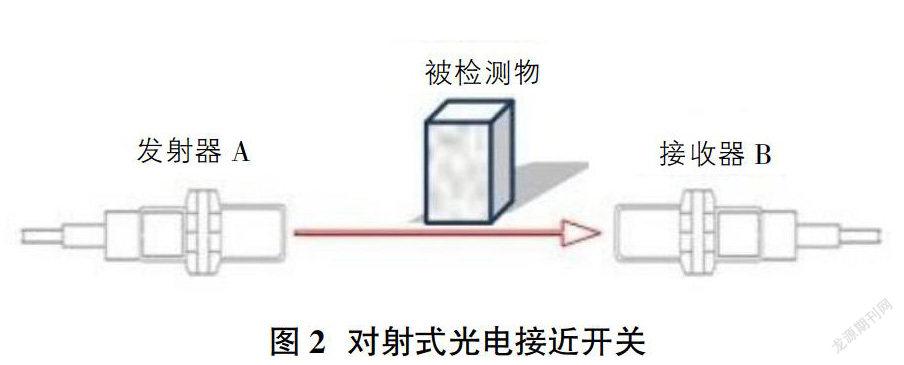
根据系统设计需要,为更好地保证检测的有效性,拟在入口处安装对射式光电接近开关,如图2所示。保证车俩在距离放行杆1米左右,“光电传感器” 是利用光学性质,能检测物体的有无传感器。其中输出形式为开关量的传感器为光电式接近开关。 光电式接近开关主要包含光发射器和光接收器两部分构成。光接收器的敏感元件 将检测出这种变化,并转换为电气信号,进行输出。此处选择红外光型光电传感器。
安装时分装在车辆入口处两侧,无车辆时,光敏管接收到红外光信号,输出高电平,当车辆到来时,将会遮挡发光管发出的红外光,光敏管未检测到红外光,将输出一个低电平信号,由此产生一个下降沿,将此信号送到PLC的输入端子。
1.2.2 放行杆控制
出入口处的放行杆升降通过电机的正反转来拖动,可根据放行杆的重量选择合适功率的直流电机来拖动,但要注意升降的速度要尽量慢,以免造成设备的损坏。
1.3 LED数码显示模块硬件设计
因显示剩余车位数和空车位坐标均为数字,此处选择LED显示,分别将PLC的输出点接入LED数码管的a、b、c、d、e、f、g,显示不同的字形,其控制方法是通过数码管的计数器驱动相应显示数字的字码段,接线方法如图3所示。中小停车库选择2位数码管显示0~99对应车位数。
1.4 PLC控制系统I/O分配
将入口、出口传感器接收信号分别送到PLC的输入端子X1和X2,放行杆升降的上限位、下限位通过X3~X6来采集,通过编写PLC程序控制输出端子,以驱动相应的数码模块和升降杆控制模块的相应动作,用Y0~Y6表示剩余车位的十位数显示,Y7~Y15表示剩余车位的个位数显示。具体分配如表1所示。
根据I/O点数的使用情况,输出占用18个端子,宜选择48个点的PLC,此处选择三菱的PLC,型号为FX2N-48MR。
2 软件系统设计
2.1 总体控制要求
根据智能停车库的应用特点,要实现有效控制,需满足以下要求:
①当入口车辆行驶至放行杆约1米处,传感器1检测到车俩,放行杆上升;
②当入口车辆经过放行杆后,传感器1生成下降沿信号,经过5秒后,放行杆下降,同时剩余车位计数器减1;同时通过LED显示;
③当出口车辆行驶至放行杆约1米处,传感器2检测到车俩,放行杆上升;
④当出口车辆经过放行杆后,传感器1生成下降沿信号,经过5秒后,放行杆下降,同时剩余车位计数器加1;同时通过LED显示。
2.2 控制流程图
如图4所示。
2.3 PLC控制程序
如图5所示。程序中,通过X1、X2的上升沿控制M8200,通过M8200的通断控制计数器的增减计数方式,因M8200不接通時默认为增计数,所以只需X1的上升沿控制M8200工作状态。入口、出口的放行杆升降位置通过X3~X6四个限位开关控制位置,杆上升到位后设计延时5秒再执行放行杆下降动作。计数器的计数值通过数据寄存器D0存放,通过除法运算,运用带锁存的七段码显示指令将商D1送入到剩余车位数值的十位数显示的数码管,将除法运算的余数D2送入剩余车位数显示的个位数码管。
3 总结
本文以PLC作为核心控制器,结合传感器检测技术、电机驱动技术等基本知识,实现了对车库管理系统出入口车辆检测、放行杆升降控制、剩余车位数显示等基本功能,简单快捷,安全稳定,对中小型停车库的安装调试有一定的指导价值。
参考文献:
[1]史国生.电气控制与可编程控制器技术[M].北京:化学工业出版社,2003.
[2]郁汉琪.电气控制与可编程序控制器应用技术[M].南京:东南大学出版社,2003.
[3]罗文.可编程控制器应用技术[M].北京:机械工业出版社,2014.
[4]毛昀,杨峰.基于PLC的步进电机控制系统设计[J].工业仪表与自动化装置,2014(04):87-89,98.
[5]郭玮,田录林,张永良,崔葛安,杨芸.基于嵌入式PLC软核的通用保护平台设计与实现[J].电力系统保护与控制,2014,42(16):122-126.
[6]周石强,郭强,朱涛,刘旭东.电气控制与PLC应用技术的分析研究[J].中华民居(下旬刊),2014(01):199,201.
[7]王前进,马小平,张守田.PLC软冗余在通风机监控系统中的应用[J].工矿自动化,2014,40(01):93-96.
[8]王云刚,陈文燕.基于MCGS和PLC的水位自动控制系统设计[J].测控技术,2014,33(01):96-98,103.
猜你喜欢
现代职业教育·高职高专(2022年14期)2022-05-01
课程教育研究(2021年9期)2021-04-13
中国电子报(2019年54期)2019-10-24
福建基础教育研究(2019年1期)2019-09-10
福建基础教育研究(2019年1期)2019-05-28
时代英语·高一(2019年1期)2019-03-13
中学物理·初中(2017年8期)2018-03-06
新高考·高一物理(2015年5期)2015-08-18