基于手势识别的小车控制
2020-09-10 21:23赵孙裕
内燃机与配件 2020年17期
赵孙裕



摘要:利用PAJ7620U2手势识别传感器,结合LabVIEW软件,设计了一款手势识别系统,可以识别9种手势,并通过BT06蓝牙无线通讯,将相关指令传递给小车的控制系统,通过手势实现小车的前进、后退、左转向、右转向、停车、直线行走等功能,实现无需佩戴任何传感器,即可实现小车的非接触式控制。
关键词:手势识别;LabVIEW;小车控制
0 引言
手势识别是通过摄像头等光学传感器,将拍摄到的包含手势的图像序列,通过计算机视觉技术进行处理,识别人手的姿势,进行人机交互。由于手势识别时无需另外佩戴传感器,仅需要视觉传感器即可,因此操作起来比较自由[1-3]。
文献[4]设计了基于电容式传感器FDC2214的手势识别系统,采用单极板单通道法和频率测量法提高测量的精度,在学习模式中,通过对采集的不同手势的电容值进行阈值标定,记录训练数据。在识别模式中,调用训练模型对采集的识别者手势进行分类识别。经过有限次学习和阈值分析优化,识别正确率可以达到94.56%。文献[5]提出基于注意力机制和特征融合的手势识别方法,来解决动态手势视频流预处理过程中,随机采样或密集采样中,关键帧丢失或数据冗余导致特征融合在时序建模中,可能丢失重要时序信息的问题。通过包含注意力机制的长短期记忆网络,在时序建模过程中抽取重要数据,来避免采样方法的随意性或盲目性;设计三层特征融合网络对抽取的RGB特征和深度图像特征进行融合处理,提升动态识别的准确率。文献[6]通过去除手势无效帧、手势帧数据补全和关节长度归一化等数据预处理,并根据手部关节坐标、手势距离函数分段提取动态手势关键帧,以此来提取手的全局运动特征和手指的局部运动特征;采用线性判别分析进行特征降维;最后利用带高斯核的支持向量机实现动态手势识别与分类,对14类手势和28类手势进行实验,其分类识别准确率比现有方法分别提高11.27%和4.89%。
但上述算法,在实际应用时,对系统要求较高,基于此本文提出一种低成本的基于图像识别传感器PAJ7620U2的手势识别控制技术,来控制小车实现前进、后退、转向等操作[7]。
1 硬件搭建
该系统的硬件核心是:ATK-PAJ7620_V1.2手势识别模块,该模块是ALIENTEK推出的一款高性能手势识别传感器模块。该模块采用原相科技(Pixart)公司的PAJ7620U2芯片,芯片内部集成了光学数组式传感器,实现复杂的手势和光标模式输出,自带九种手势识别,支持上、下、左、右、前、后、顺时针旋转、逆时针旋转和挥动的手势动作识别,以及支持物体接近检测等功能。
TK-PAJ7620模块具有:体积小、灵敏度高、支持中断输出、兼容3.3V/5V系统、使用方便等特点。
PAJ720是原相科技(PixArt)公司推出的一款光学数组式传感器,内置光源和环境光抑制滤波器集成的LED,镜头和手势感测器集成在一个小的立方体模组内,能在黑暗或低光环境下工作。同时传感器内置手势识别,支持9个手势类型和输出的手势中断和结果。并且内置还提供接近检测功能,可用于感测物体接近或离开。
PAJ7620的特点包括:
①IIC接口,支持高达400Khz通信速率。
②内置9个手势类型(上、下、左、右、前、后、顺时针旋转、逆时针旋转、挥动),支持输出中断。
③支持接近检测功能,检测物体体积大小和亮度。
④待机功耗电流15uA。
⑤抗灯光干扰。
PAJ7620的模块采用的是IIC通讯协议,需要利用Arduino Nano编制相应的程序,将IIC协议转化为串口通讯协议,传递给计算机,硬件连接框图如图1所示。
2 软件控制
整个系统软件分为三部分:控制小车的下位机软件系统、负责手势识别模块与上位机通讯的软件系统和上位机软件系统。
①控制小车的下位机软件系统。主要通过蓝牙模块接收上位机的控制指令,并将指令转化为各个车轮速度控制信息。
②手势识别通讯模块。主要实现通过IIC协议,将PAJ7620手势识别模块的手势信息读取出来,并通过串口传递给上位机。实现下位机软件系统包括两部分:控制小车的软件系统和采集PAJ7620手势识别信息并传递给上位机的软件系统。
③上位机软件系统。主要利用LabVIEW软件,设计对应的界面(如图2所示),并通过相连的Arduino Nano来识别PAJ7620模块传过来的手势信息,并启动对应的小车控制指令,然后通过蓝牙模块BT06传递给小车,实现小车基于手势的可控运动。
3 实验验证
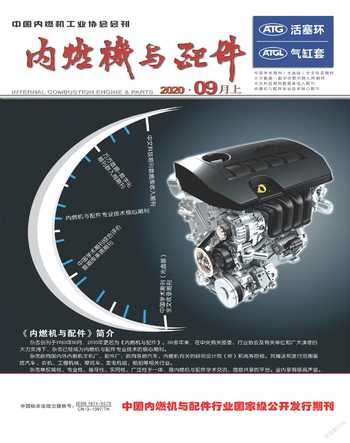
将PAJ7620U2模块固定在笔记本计算机的顶部,将光学传感器正对着操作者,手在传感器的正前方,保持与传感器的垂直距离,做出图3和4所示的手势,可以分别得出“上”、“下”、“左”、“右”、“顺时针旋转”、“逆时针旋转”、“挥动”的识别结果。
手在传感器的前方,与传感器之间垂直方向上距离有相对的变化,做出图5所示的手势,可以得出“前”、“后”的识别结果。
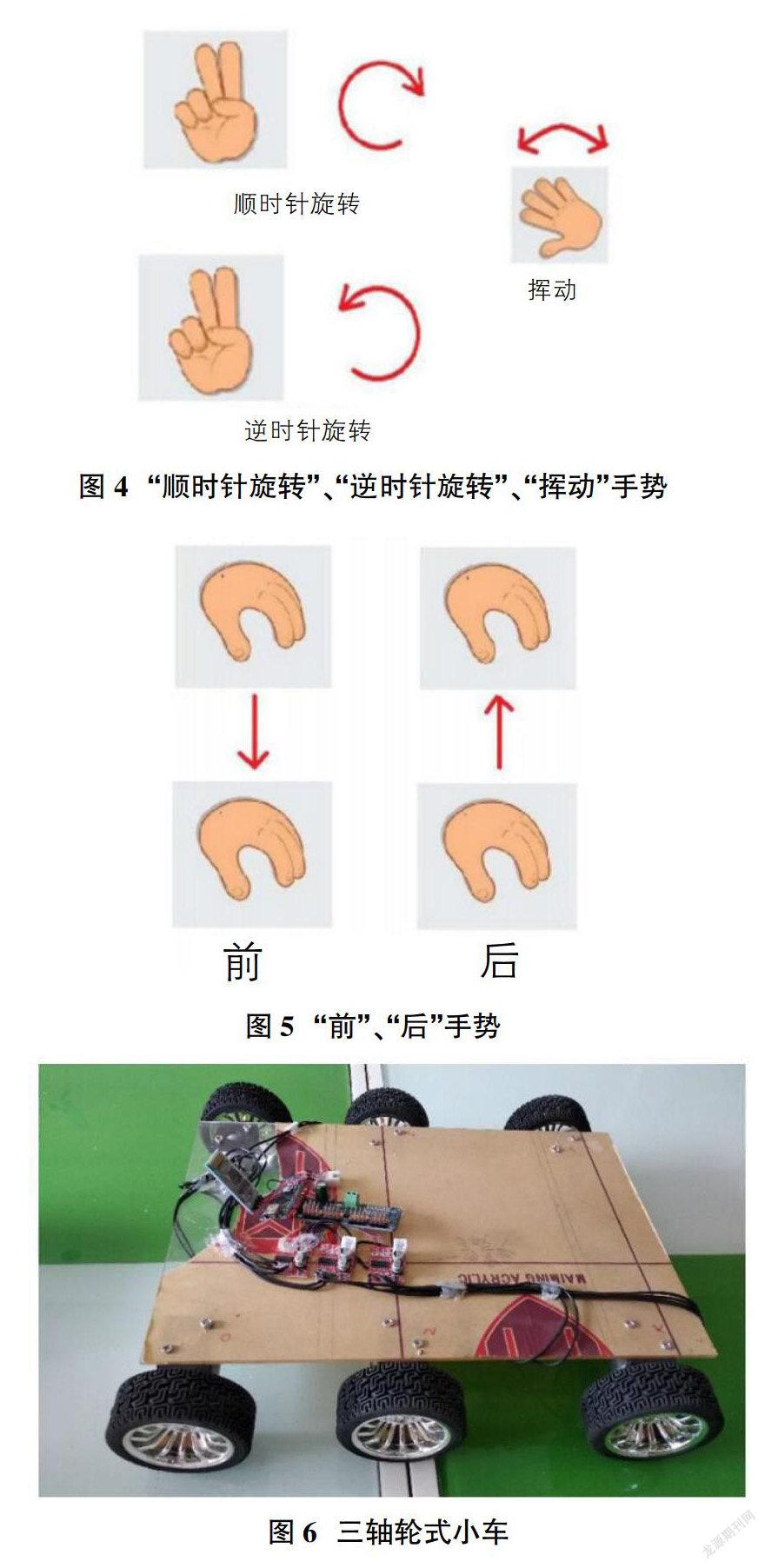
上位机软件系统根据识别的结果,执行对应的控制指令,并将指令,通过蓝牙传递给小车上的控制模块,实现图6所示三轴轮式小车的对应行驶功能控制。
4 结论
本文利用LabVIEW软件,基于手势传感器,设计了一款基于手势识别的小车控制系统,实现了9种手勢的小车行驶控制。
参考文献:
[1]任海兵,祝远新,徐光,等.基于视觉手势识别的研究——综述[J].电子学报,2000,28(2):118-121.
[2]王鹏.动态手势识别研究[D].大连理工大学,2013.
[3]刘江华,程君实,陈佳品.基于视觉的动态手势识别及其在仿人机器人交互中的应用[J].机器人,2002,24(3):197-200.
[4]王鑫,陈成凯,陈梓威,霍非凡,林乐坤,吴珂,刘浩.基于FDC2214单通道阈值分析的手势识别系统[J/OL].实验技术与管理,2020(06):112-115,178[2020-06-20].https://doi.org/10.16791/j.cnki.sjg.2020.06.024.
[5]高明柯,赵卓,逄涛,王天保,邹一波,黄晨,李德旭.基于注意力机制和特征融合的手势识别方法[J].计算机应用与软件,2020,37(06):199-203.
[6]缪永伟,李佳颖,孙树森.融合手势全局运动和手指局部运动的动态手势识别[J/OL].计算机辅助设计与图形学学报:1-10[2020-06-20].http://kns.cnki.net/kcms/detail/11.2925.TP.20200609.
1357.008.html.
[7]路凯,李小坚.手势识别研究概述[J].西安文理学院学报(自然科学版),2006,9(2):91-94.