基于AMESim与ADAMS的机液伺服联合仿真设计与应用
2020-09-10 07:22刘同伟
内燃机与配件 2020年19期
刘同伟

摘要:电液伺服控制是实现机构高精度运动的关键技术,对机构进行仿真研究,是观测系统静动态特性、预测故障、设计控制参数等的重要手段。AMESim提供了一套机电液一体化仿真建模与分析的解决方案,主要包括了六大系统模块。ADAMS提供了多体系统动力学仿真建模与分析的环境,可进行机械结构的约束设置、动力学参数设置、运动与动力加载等。通过接口技术可实现AMESim与ADAMS的联合,充分发挥各软件的优势。建立一种变幅机构联合仿真模型,采用PID控制方法进行定值角度控制,结果表明联合仿真接口稳定,可作为机液联合仿真设计的参考。
Abstract: Electro-hydraulic servo control is the key technology to achieve high-precision movement of mechanism. The simulation of mechanism is an important means to observe the static and dynamic characteristics of the system, predict faults, design control parameters, etc. AMESim provides a set of Mechatronics simulation modeling and analysis solutions, mainly including six system modules. Adams provides an environment for dynamic simulation modeling and analysis of multi-body system, which can be used for constraint setting, dynamic parameter setting, motion and dynamic loading of mechanical structure. The combination of AMESim and Adams can be realized through the interface technology, and the advantages of each software can be brought into full play. A joint simulation model of luffing mechanism is established, and PID control method is used to control the fixed angle. The results show that the joint simulation interface is stable, which can be used as a reference for the joint simulation design of mechanical and hydraulic systems.
關键词:电液伺服控制;联合仿真;AMESim;ADAMS;PID
Key words: electro hydraulic servo control;co-simulation;AMESim;ADAMS;PID
0 引言
机液伺服控制往往使用在对位置、力等控制精度要求较高的场合,如多液压缸驱动的并联结构平台、液压驱动的机器人等[1,2]。因此,电液伺服控制技术是实现机构进行高精度运动的关键技术,其组成通常为检测装置、运算单元、伺服阀、伺服缸、激励信号等。由于电液伺服系统的静动态特性等往往难以测量,而随着计算机辅助分析(CAE)技术的发展,采用仿真手段研究电液伺服系统特性是目前流行的方式[3,4]。AMESim提供了较为丰富的机液仿真领域的解决方案,在AMESim中可进行液压系统建模、液压泵模型仿真、阀结构建模与仿真、热仿真、电机仿真、3D机械模型仿真、控制信号产生等。ADAMS是一款多体系统动力学建模与仿真软件[5,6],借助虚拟样机技术,在计算机上构造三维可视化机械系统的模型,模拟在现实环境下系统的运动和动力特性,已广泛应用于汽车制造业、航空航天、国防工业、通用机械制造业等。ADAMS软件的基本组成模块主要包括三部分:ADAMS/View、ADAMS/Solver、ADAMS/PostProcessor。
1 联合仿真软件实现
1.1 AMESim液压系统仿真
AMESim是一款多学科交叉的系统建模与仿真软件,软件组成主要包括:流体系统、电气系统、电机系统、热系统、机械系统和信号系统。提供了工程中常见的液压系统仿真设计平台,已在多个工业领域得到应用,可实现多种复杂系统的建模和仿真。通过调取元件建立新的部件子模型,实现了对实际机构的建模与优化。
其中,流体系统由多种流体单元组成,如管道、过滤器、液压缸、液压泵、阀等。液压缸包括单作用液压缸、双作用液压缸等,可设置活塞杆直径、钢筒直径、活塞杆行程等参数。液压泵包括定量泵、变量泵等。阀模块包括单向阀、三位四通阀、调速阀、梭阀、电液伺服阀等。机械系统模块由多种机械单元组成,如机架、弹簧、阻尼、摩擦力矩发生器、齿轮、传感器、3D机械模型等。其中3D机械模型库将平面机械结构转为三维机械结构模型。信号系统模块由多种信号单元组成,包括信号发生器、传递函数块、函数块、滤波器等。其中,在传递函数块中可建立传递函数模型,模型包括一个输入信号端口和一个输出信号端口,输出信号为输入信号经过传递函数模型后的输出;函数块与传递函数块类似,可设置一个函数模型;滤波器可设置为低通滤波器、高通滤波器、带通滤波器等。
AMESim基于图形编程方式将C或Fortran代码模型通过图形化模块的方式融入AMESim软件包中,实现了代码的直接调用。AMESet可用于生成C或Fortran语言代码。AMESim可与数学和控制软件MATLAB、MatrixX;多维系统动力学软件ADAMS、Motion;实时仿真软件xPC、Dspace;优化设计软件OPTIMUS、iSIGHT;数据处理软件Excel 等实现接口连接,大大扩展了仿真研究的功能,同时又能发挥各软件的优势。
1.2 ADAMS动力学系统
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是由美国MDI公司开发的机械系统动力学建模与仿真分析软件,主要包括三大模块,如图 1所示。
其中,模块ADAMS/View可建立机械系统的虚拟样机,支持参数化建模,可实时观察数据的变化和模型的运动等。ADAMS/Solver可自动建立并解算用于机械系统运动仿真方程,提供了用于解算复杂机械系统运动的数值方法,可对由机械部件、控制系统和柔性部件组成的多域问题进行分析,并支持多种分析类型,包括运动学、静力学、线性和非线性动力学等。ADAMS/PostProcessor采用可视化图形界面方式显示ADAMS仿真结果,可采用不同的方式回放仿真的结果。页面设置以及数据曲线格式都能保存起来,反复使用,有利于节省时间和整理标准化的格式报告,同时可以方便地顯示和比较多个仿真结果。
2 联合仿真设计
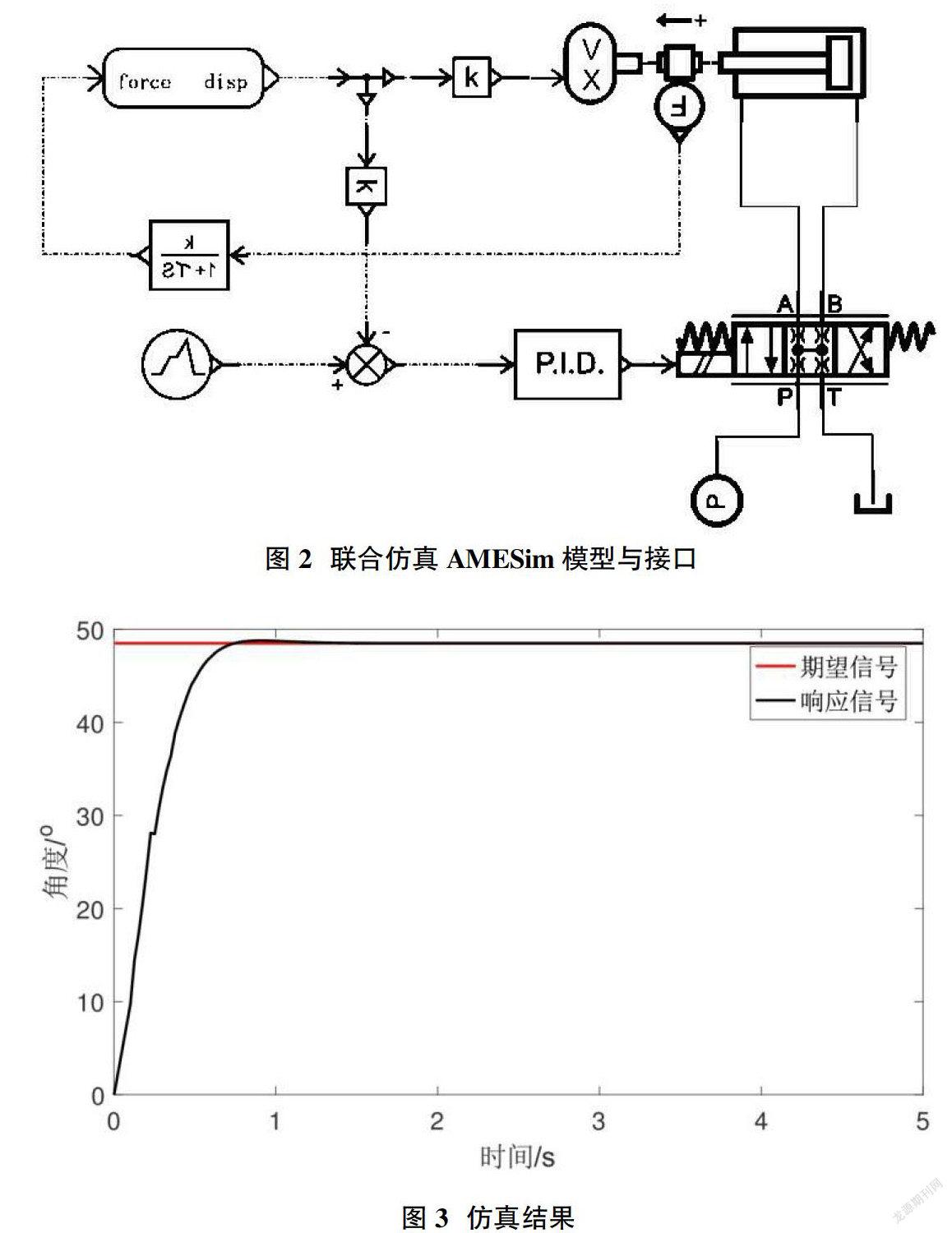
通过AMESim建立某变幅机构的液压系统仿真模型,通过ADAMS建立机构的动力学分析模型,采用PID控制方式对机构进行控制,如图2所示,机构的液压系统模型及联合接口。
对系统进行定幅度信号激励,使变幅机构从初始位置移动到指定期望位置,并一直保持下去,仿真结果如图3所示。结果表明联合仿真的接口设置是正确的,机构的运动结果符合设计需求,达到了预测机构运动情况、选择合适的控制参数等的研究目的。
3 结束语
电液伺服系统可实现机构的高精度运动控制,进行其机液联合仿真时研究机构静动态特性的关键技术手段,文中介绍了AMESim液压系统仿真软件和ADAMS动力学系统分析软件,并对某变幅机构进行了联合仿真建模,对模型进行激励响应研究,结果表明仿真接口设置正确,达到了预期效果和目的。
参考文献:
[1]吕安生.抓臂式清污机设计与关键技术研究[D].合肥工业大学,2019.
[2]尹方辰,孙杰,马更生,等.基于ADAMS-MATLAB联合仿真的液压活套多变量解耦控制[J].东北大学学报(自然科学版), 2016,37(04):500-503,507.
[3]Zhao, P.-Y., Chen, Y.-L., Zhou, H.Simulation Analysis of Potential Energy Recovery System of Hydraulic Hybrid Excavator[J].International Journal of Precision Engineering and Manufacturing, 2017,18(11): 1575-1589.
[4]Xiao, C., Zhang, G.Dynamic simulation analysis of working device for hydraulic excavator based on ADAMS[J].Telkomnika (Telecommunication Computing Electronics and Control), 2016,14(3A): 194-201.
[5]陈远龙,吕安生,侯亭波,等.基于AMESim与ADAMS的抓臂式清污机工作装置联合仿真研究[J].液压与气动, 2020(01): 137-141.
[6]张桂菊,肖才远,谭青,等.基于虚拟样机技术挖掘机工作装置动力学分析及仿真[J].中南大学学报(自然科学版),2014,45(6):1827-1833.