基于车身传感器的自主泊车建图与定位功能实现
2020-09-10 04:37:23张潜
内燃机与配件 2020年23期
张潜






摘要:随着科技水平的提升,汽车制造行业逐渐向着现代化、自动化、智能化的方向发展,汽车功能逐渐增加,其中就包括自动泊车功能,可以识别周边环境精准定位,为驾驶者提供巨大的便利。本文主要以自主泊车为研究对象,围绕于车身传感器的自主泊车建图与定位功能实现展开探讨,先分析主流定位方案的利弊,接下来基于车身传感器确定方案思路,最后研究建图和定位系统的设计过程,测试实际的定位效果,希望为自动泊车系统今后的研发提供一定参考借鉴。
Abstract: With the improvement of the level of technology, the automobile manufacturing industry is gradually developing towards modernization, automation, and intelligence. The functions of automobiles are gradually increasing, including the automatic parking function, which can identify the surrounding environment and provide precise positioning for drivers. convenient. This article mainly takes autonomous parking as the research object, and discusses the realization of autonomous parking mapping and positioning functions of the body sensor. The pros and cons of mainstream positioning schemes are analyzed first, then the idea of the scheme is determined based on the body sensor, and finally the mapping and positioning are studied. The system design process, testing the actual positioning effect, hope to provide a certain reference for the future research and development of the automatic parking system.
关键词:车身传感器;自主泊车;建图;定位;功能实现
Key words: body sensor;autonomous parking;mapping;positioning;function realization
中图分类号:U463.6 文献标识码:A 文章编号:1674-957X(2020)23-0202-03
0 引言
自动泊车主要是在停车位附近操作,通过控制系统自动泊车入位,而自主泊车则是在自动泊车基础上增加无人驾驶功能,在地下车库自动穿行寻找车位。目前,自动泊车技术趋于成熟,但是实现难度更是相对较高,基础环境建设、车辆设施等都要达到一定条件,才能保证自主泊车的精准性。本文主要基于车身传感器展开设计,实现自主泊车建图及定位功能,才能保证自主泊车的精准性,推动自动泊车技术向着智能化、自动化的方向不断发展进步。
1 主流定位方案利弊
汽车需要清楚感知周边环境,同时精准定位泊车位置,才能实现自动代客泊车,为了达到上述要求,首先要选择适合的定位方案,现阶段成熟的定位技术较多,都存在一定的利弊,下面介绍几种主流的定位方案,重点研究定位方案的优缺点:
第一,惯性导航系统(INS)。该定位方案的进度较高,可以快速更新实时数据,但是在使用一段时间后,会累积大量的误差。第二,全球导航卫星系统(GNSS)。GNSS是现阶段最为成熟的一种定位技术,但是汽车的行驶环境比较复杂,在地下车库、隧道等位置还是会出现定位问题,包括信号丢失、精度低、多路径等问题。第三,差分GNSS和INS组合定位。这种组合定位的精度更高,可以达到厘米级定位,但是成本相对较高,同时对于GNSS依赖性更强,现阶段被应用与无人驾驶车辆。第四,高精度地图(HDMap)定位技术。该方法的定位精度较高,但是在正式应用之前,需要结合当地情况构建高精度地图,购置专业的硬件设备,花费大量的费用处理数据。第五,激光雷达里程计算法。这种定位方案较为成熟,拥有精度高、实时性强等优势,但是在实际应用过程中,激光雷达占地面积较大,为此一般用于制作离线HDMap。第六,视觉传感器定位技术,这种定位方案可以感知车辆周边的环境信息,基本不受到车辆打滑等情况的影响,同时占用空间较小,可以快速安装在行驶车辆上,后续可以结合实际需求拓展各个功能,造价成本更低。但是单纯的视觉里程计(VO)存在一定的不确定性,提供的定位信息精准度较低[1]。
2 基于传感器方案的思路分析
根据上述研究内容可知,现阶段主流的定位技术较多,包括INS、GNSS等,都存在一定的優点和缺点,其中最适合自主泊车的是视觉定位技术,但是视觉里程计定位技术限制较多,如果单纯利用该定位技术,可能在实际定位过程中,会出现尺度不确定等问题,无法提供精准的数据信息,考虑到该情况后,决定将视觉定位技术作为基础,将车身传感器作为建图与定位系统的核心部件。
首先,要先确定建图与定位系统需要的传感器装置,正常情况下,汽车拥有的传感器设备较多,都拥有不同的功能,为此要考虑到实际的定位需求,选择几种核心的传感器作为系统的数据收集装置。考虑到汽车自主泊车需求,最终选定三种核心传感器装置:一是车辆转速传感器,该传感器可以收集车辆的轮速脉冲,这也是控制自主泊车的关键数据信息。二是转角传感器,该传感器可以收集车辆的转角信息,一般设置在方向盘中间位置,与车辆脉冲转速相似,都需要提供给定位系统。三是前视鱼眼摄像头,该传感器可以获取车辆周边信息,这也是最重要的传感设备,为后续的建图定位提供充足的数据信息支持[2]。
接下来,确定传感器装置后,还要实现多传感器数据融合,不同传感器获取的信息存在一定的差异。建图与定位系统运行期间运用车辆里程计定位技术,主要获取二维信息,而前视鱼眼摄像头获取的则是三维信息,为了融合不同形态的数据信息,就要先约束车辆位姿,才能串联其不同的点位信息,这时候就要根据实际的定位需求合理设计约束条件。
最后,确定传感器和数据融合方案后,已经为车辆自主泊车定位奠定良好基础,定位阶段依靠视觉传感器检测特征点位,在利用检测到的点位匹配三维路标点位即可,就可以实现精准定位,这种传感器定位方案不会受到特殊场景的限制,在地下车库、停车场等场合也可以正常运行。
3 建图与定位系统设计
在设计建图与定位系统时,主要从三方面入手,首先要科学运用车身传感器,主要利用各类传感器收集需要的数据信息,这也是建图和定位系统正常运行的前提条件,接下来要科学展开车辆位姿计算,通过科学的约束条件融合二维及三维数据信息,最后要实现平面定位,利用前视鱼眼摄像头获得特殊点信息,合理匹配三维路标点位[3]。
3.1 车身传感器
车身传感器主要用于收集汽车运行中的工况信息,包括车速、介质温度、发动机工况等,收集到信息后转化为电信号,输入计算机系统,实现对车身的精准控制。建图和定位系统主要利用车身传感器收集三种信息:第一,车辆轮速脉冲。车辆通过转速传感器收集到轮速脉冲,这些信息正常情况下用于控制VDC、ABS、ESP等系统,这也突出了转速传感器的重要地位,在建图定位系统中,转速传感器负责传输车辆轮速脉冲,为车辆自主泊车提供数据支持。第二,车辆转角信息。车辆行驶期间主要依靠转角传感器获取转角信息,通过转角信号可以了解车辆转动的方向、角度、速度等信息,一般将传感器设置在方向盘中间位置上,在建图与定位系统中转角信息用于确定车辆泊车路线。第三,前视鱼眼摄像头。摄像头主要用于获取车辆附近的环境信息,鱼眼镜头焦距较短,属于广角镜头的一种,可以最大化获取周边环境信息,避免车辆自主泊车时碰撞到周边障碍物,同时也是建图定位系统的核心装置,提供绝大部分的建图信息[4]。
在设计建图与定位系统时,车身传感器负责收集相关数据,同时还要融合到一起,实现多传感器数据融合,其中最为关键的就是视觉传感器及车辆里程计,融合后才能提供建图与定位需要的数据信息。
3.2 车辆位姿计算
在通过车身传感器收集需要的数据信息后,接下来要展开对车辆位姿的科学计算。正常情况下,车辆里程计只能得到二维平面信息,而视觉计算车辆位置则完全不同,可以得到单位信息,为了融合两种不同的数据信息,这时候就要实现对车辆位姿的约束处理,将其限制在二维平面上,接下来要处理好扰动信息,将其作为噪声项,集成到SE(2)-XYZ约束中,该约束可以顺利串联出二維及三维信息,主要利用图像特征点检测方法,将三维的特征云信息对应到二维的位姿信息上,形成一个稳定的融合状态。最后,要科学利用约束条件,逐渐构建出常用图优化结构,这样就得到了稳定的定位和建图系统,系统主要依靠视觉里程定位。
可以看出,车辆位姿计算也是建图和定位系统的重要设计环节,重点是将二维及三维信息联系到仪器,这就需要先约束车辆位姿,定位在二维平面上,就可以利用一定的约束条件及方法联系二维位姿及三维特征点云信息,得到一个自动泊车的图纸信息[5]。
3.3 平面定位实现
在完成车身传感器数据融合及车辆位姿计算后,就可以进入到平面定位实现环节。在车辆定位过程中,主要依据视觉传感器,前视鱼眼摄像头可以检测当前环节,找到关键的特征点位,将这些点位上传到建图和定位系统,找到与之匹配的三维路标点位,在匹配过程中,要满足两大要求,一个就是保证匹配的精度,这也是顺利完成自动泊车的前提条件,一旦匹配精度没有达到要求,就可能出现定位不精准的现象,导致车辆碰撞到障碍物,引发一系列的问题。另一个就是保证系统的鲁棒性,该特性是对Robust的音译,主要是指特殊情况下系统的生存能力,在车辆自动泊车遇到一些特殊情况时,也要保证建图及定位系统正常运行,才能保证车辆及驾驶者的安全性,在满足上述两大要求的基础上,要保证车辆可以精准在平面环境下定位。建图与定位系统可以在特定场景下稳定运行,例如地下停车库、隧道等,精准发挥定位功能,为后续的自动泊车提供稳定技术支持。
通过合理的规划研究,设计得到建图与定位系统,主要基于车身传感器完成设计工作,接下来还要展开合理的测试,重点测试定位效果,确认各项指标均达到设计要求后,才能进入到试运行阶段。
4 建图和定位效果测试
在建图与定位系统设计结束后,还要接受建图和定位效果测试,选定一些特定场景,为验证建图精度,以RTK数据为真值,对比验证建图数据,来验证建图精度;为验证定位效果,以地下车库及停车场的真实尺寸来验证定位精度,分别测试系统的定位效果。
定位效果测试过程如下:选择相同的测试车辆,选择正常路面、地下车库、地下停车场以及实验场地作为测试场景,各测试标准和结果将在下文展示。
4.1 验证建图精度
建图精度指SLAM建图阶段车辆在地图中的行驶路径与车辆实际行驶路径的重合程度,用绝对轨迹误差和相对位姿误差来衡量建图精度。
①绝对轨迹误差(ATE)。
绝对轨迹误差为建图轨迹位姿与真实轨迹位姿的直接差值,直观反映建图精度、轨迹全局一致性。定义第i帧的绝对误差为:
在所述测试环境下,开启SLAM,车辆分别沿直线、直线加一次转弯和直线加两次转弯形式的路线行驶50m左右,车辆行驶过程中同步保存RTK数据作为行驶轨迹的真值,车辆停止后,完成SLAM建图。同步并对齐RTK轨迹和SLAM轨迹,使用式(1)和式(2)计算APE和RPE。
建图精度:
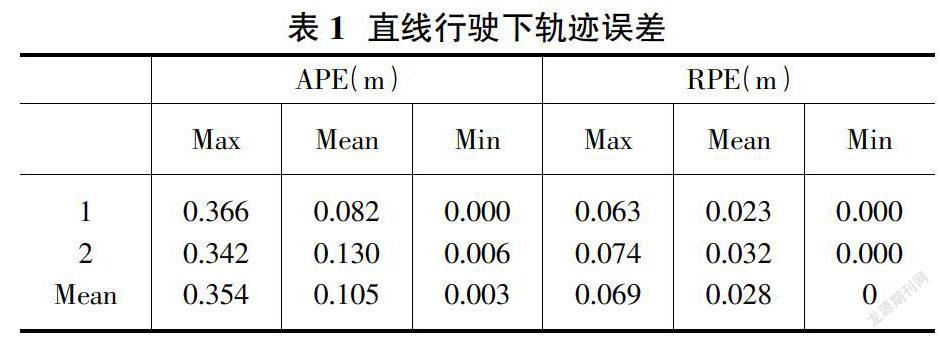
①直线行驶。
沿直线行驶,记录SLAM和RTK数据,计算轨迹误差,统计结果如表1。
②一次转弯。
行驶过程中进行一次转弯,记录SLAM和RTK数据,计算轨迹误差,统计结果如表2。
4.2 定位精度
定位精度指SLAM定位阶段车辆定位位置与车辆的实际位置的重合程度,用横向误差errorloc x和纵向误差errorloc y来衡量定位的精度。用(xloc,yloc)和(xgt,ygt)来表示定位位置和真实位置,则误差可表示为:
以两种方式验证定位精度:
方式一:验证车辆开启定位误差,车辆停在SLAM建图路线上的任意位置(距离建图轨迹横向距离±50cm之内),并记录该位置真实坐标,开启SLAM定位模块,得到SLAM定位结果,利用式(5)和式(6)计算定位误差。结果如表3。
方式二:验证车辆运动定位误差,车辆停在SLAM建图路线的任意位置(距离建图轨迹横向距离±50cm之内),开启SLAM定位模块,沿建图路径行驶到建图路径终点后停住,得到SLAM定位结果,利用式(5)和式(6)计算定位误差。结果如表4。
4.3 定位成功率
定位成功率指车辆在建图路径上任意位置进行定位,定位成功的次数与定位总次数的比值。测试结果如表5。
经过一系列的测试后,发现所有测试项目的定位效果都达到设计要求,可以实时更新数据信息,完成建图和定位工作,测试期间没有出现任务问题,顺利通过测试。在测试过程中,还重点检查了建图与定位系统的核心部分,包括车身传感器、车辆位姿计算及平面定位,完全与模拟仿真过程一致,没有出现任何意外情况。
经过一系列的测试后,确定自主泊车建图与定位功能完全实现,充分发挥车身传感器定位技术的优势特点。
5 结束语
综上,主流的自动泊车定位技术都存在一定的利弊,经过研究讨论后决定选择视觉定位技术,结合实际的泊车需求合理优化改进,基于车身传感器设计出自主泊车的建图与定位系统,顺利通过定位效果测试及定位效果测试,完全达到预计的定位效果。在设计建图与定位系统时,核心設备为车身传感器,可以利用多种传感器收集车辆运行的信息,实现多传感器数据融合,通过限制车辆姿位的方式将二维和三维点位联系到一起,定位时可以利用视觉传感器检测当前环境点位,匹配三维点位后精准定位。
参考文献:
[1]沈中伟,向阳.基于RSU/OBU和压力传感器的车身精确定位系统[J].内燃机与配件,2019(009):196-197.
[2]辛鑫.基于多传感器信息交互的自动泊车系统关键技术研究[D].2019.
[3]刘泽.基于深度学习和OpenCV的自动泊车车位视觉检测与定位系统设计[D].2020.
[4]卢振兴,曾云.基于深度学习和多传感器信息融合的全场景自动泊车技术研究和应用[J].环渤海经济瞭望,2019(007):197.
[5]毕清磊.自动泊车辅助系统的研究与开发[D].2018.
猜你喜欢
中学生数理化·七年级数学人教版(2022年6期)2022-06-05 06:50:48
交通信息与安全(2022年1期)2022-03-20 14:42:36
汽车工程师(2021年12期)2022-01-17 02:29:56
交通信息与安全(2021年6期)2022-01-08 04:58:20
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
电子制作(2019年10期)2019-06-17 11:45:06
成都信息工程大学学报(2018年4期)2019-01-23 06:57:18
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
自动化学报(2017年4期)2017-06-15 20:28:55