基于履带车自适应鲁棒控制器的研究
2020-09-10 13:23王晓丽孙晓莉王谞衡
内燃机与配件 2020年9期
王晓丽 孙晓莉 王谞衡





摘要:自适应鲁棒控制算法一直是非线性控制领域研究的热门课题。对于履带控制,正好是一个多输入多输出、非线性的系统,符合自适应鲁棒控制算法的设计思想,本篇论文以履带车行走控制为研究对象,对已建好的履带车样机为控制对象,使用MATLAB/Simulink仿真软件,对自适应鲁棒控制算法进行建模,设计出合适的控制律,从而驱动履带车行走的实际状态,最终得到履带车行走控制,快速且平稳的到达期望的状态。
关键词:自适应鲁棒控制算法;非线性系统;自适应控制;履带车;Matlab/Simulink
0 引言
履带车的运动较复杂,本文以自适应鲁棒控制算法为研究基础,设计履带车自适应控制系统,以履带车行走三种工况为例展开研究。三种运动工况分别是:蛇形运动、圆周运动、八字形运动。其中蛇形运动情况最为复杂[1]。结合对于履带车控制律的设计,以这三种运动工况为例,对设计好的自适应控制器进行模拟仿真。
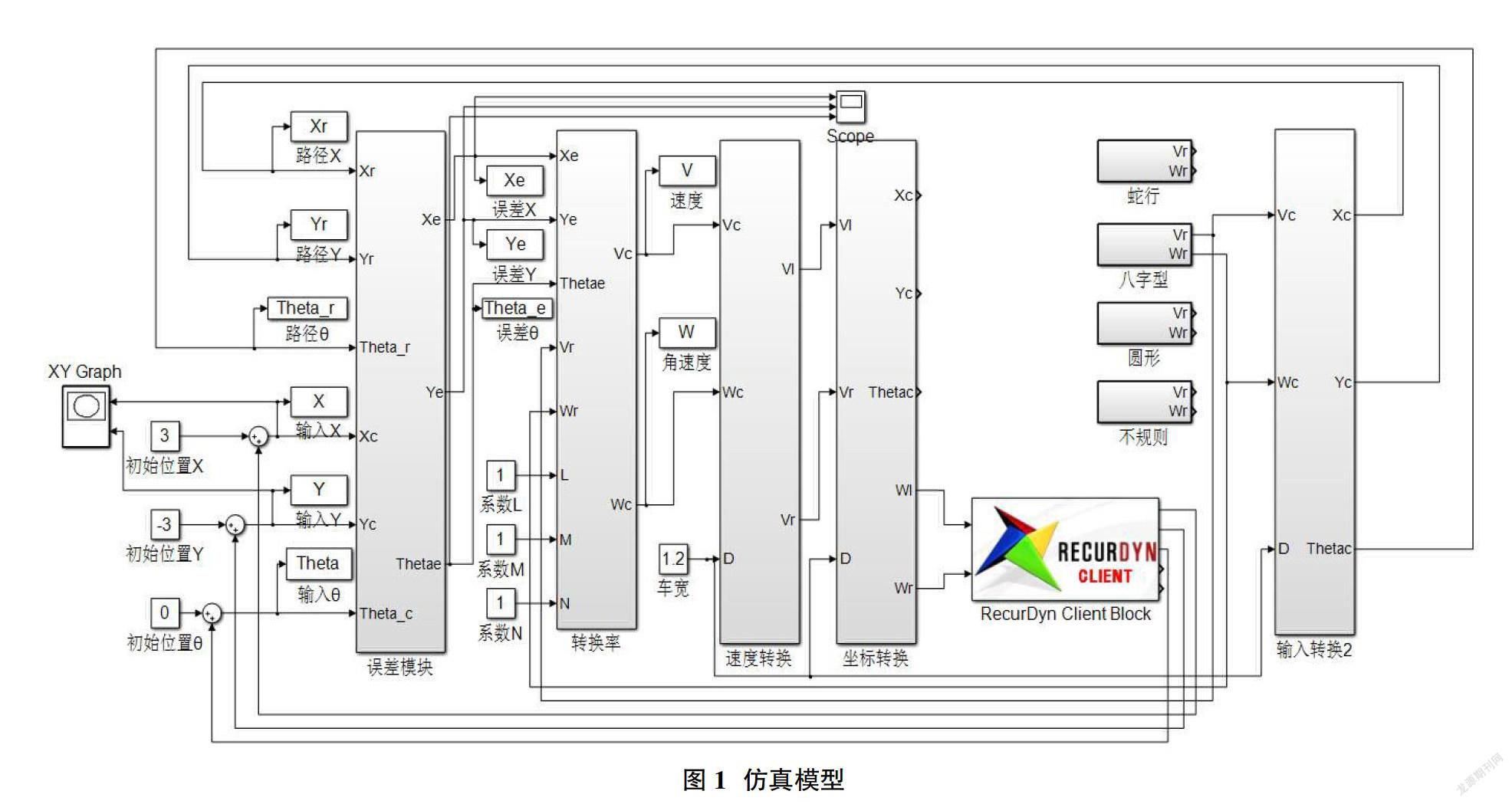
1 建立履带车样机仿真模型
履带车样机测试模型如图1所示。
2 三种工况下仿真实验分析
根据以上对于履带车控制律的设计,对蛇形、圆周、八字形运动三种运动工况为例,对自适应控制器进行模拟仿真分析[2]。
2.1 蛇形运动
蛇形运动履带线速度角速度分别为:
使用Matlab软件中的Simulink对蛇形运动进行模拟仿真,可以得到图2结果。
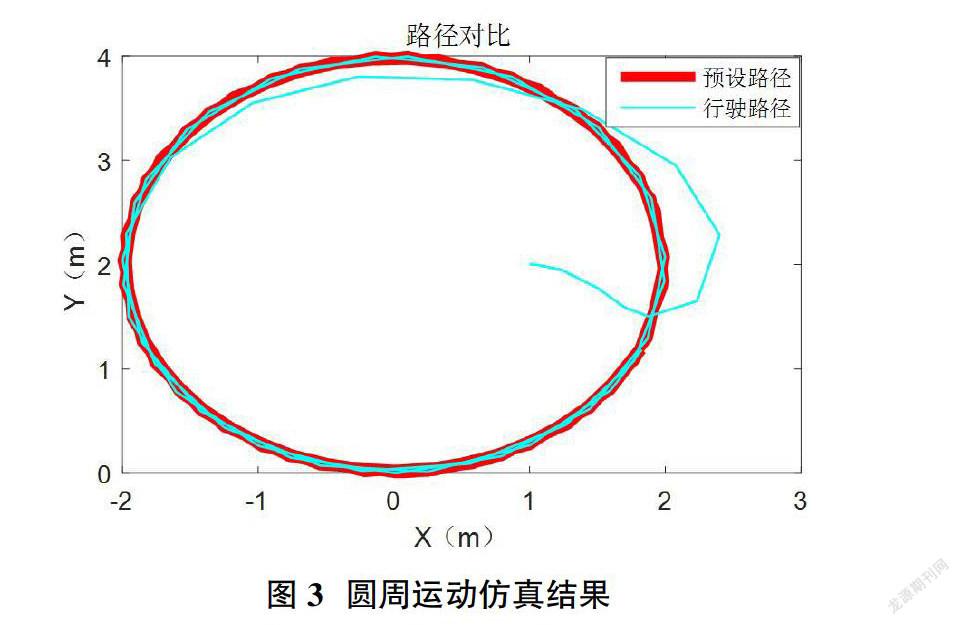
2.2 圆周运动
圆周运动履带线速度角速度分别为vr和ωr,利用Matlab软件中的Simulink,对圆周运动进行模拟仿真,得到图3波形。
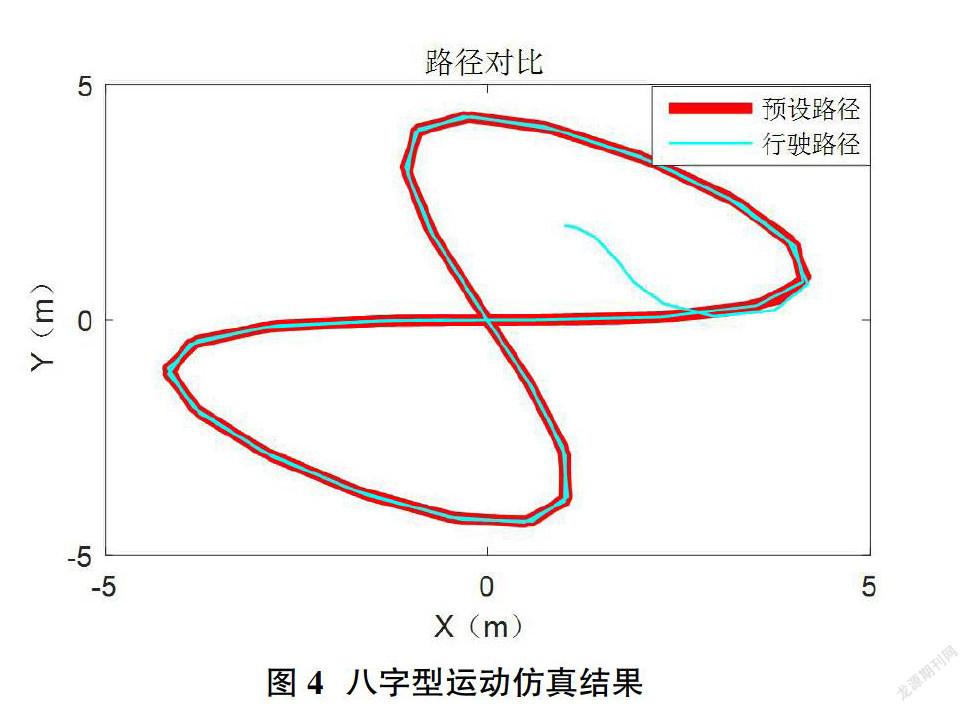
2.3 八字型运动
八字型運动履带线速度角速度分别为:
继续使用Matlab软件中的Simulink建立八字型运动的仿真模型,可以得到图4结果。
3 履带行走装置虚拟样机仿真
3.1 履带行走装置的运动学模型
对于履带车的控制结合履带车运动学分析,可知履带车左、右轮角速度与线速度的关系为:
其中ωl、ωr分别为履带车左、右轮角速度。
由式(3)履带车左、右轮角速度与线速度之间的关系,假设履带车质心的速度为v0,角速度为ω0,则有如下关系的关系:
通过式(4)能够得出履带车左右驱动轮电机的输出转速:
3.2 仿真结果
连接Matlab软件中的Simulink,仿真结果如图5所示。
由图5可见履带车的行驶速度能够迅速接近假设路径。仿真结果在预计范围之内,误差也在允许范围内,从而可知得出该控制方法有效,具有可行性。
4 结论
通过自适应鲁棒控制算法的研究,采用此方法所设计的控制律作用在履带车控制系统中,具有稳定性。故通过此方法,将会有效提高履带行走装置的自适应行走效率和控制精度,大大提高智能履带的实际应用价值。
参考文献:
[1]岳红云.几类非线性系统的自适应Backstepping模糊控制研究[D].导师:李俊民.西安电子科技大学,2014.
[2]李超群,陈澜.基于Backstepping的带推力矢量飞艇姿态控制系统设计[J].现代电子技术,2014,02:9-12.
[3]王传安,王再兴.大坡度履带台车重心对车辆性能的影响研究[J].内燃机与配件,2017(02):16-17.