结合幅度信息的扩展目标随机有限集跟踪方法
2020-09-05 14:35:56孙进平陈小龙张志国
雷达学报 2020年4期
柳 超 孙进平 陈小龙 张志国
①(北京航空航天大学电子信息工程学院 北京 100191)②(海军92853部队 葫芦岛 125106)③(海军航空大学 烟台 264001)
1 引言
多目标跟踪的目的是从一系列被噪声、漏检和虚警污染的传感器量测中估计出目标的数目和状态[1]。解决此类问题的一个重要环节是建立量测和目标状态之间的关系模型。传统跟踪方法[2]假设一个目标最多只能产生一个量测,所建立的模型称为标准量测模型,目标被称为点目标。这一模型显著降低了多目标跟踪的复杂度,因而获得了广泛应用。但是随着传感器技术的发展,标准量测模型在许多情况下已不再适用。一方面当传感器的分辨率比较高或目标与传感器之间的距离比较近时,目标可能会占据多个分辨单元,从而产生多个量测。例如,当采用车载雷达对车辆进行跟踪和采用激光测距传感器对行人进行跟踪时,都可能引起一个目标产生多个量测的现象,且量测的分布往往能反映出目标的形状特征。这种类型的目标称为扩展目标[3]。另一方面,海上的舰船或空中的飞机等一些军事目标经常以编队的形式出现,当这些目标与传感器之间的距离较远时可能会出现一个“群”目标产生多个量测的情形。由于雷达分辨率的制约,群内的目标往往是不可分辨的,此时合理的处理方式是将这一群目标视为一个独立的目标进行跟踪,因而这类目标被称为“群目标”。由于不满足标准量测模型的要求,扩展/群目标的跟踪需要采用非标准量测模型。
随着信号处理以及计算机技术的发展,在过去的十多年间,对扩展/群目标跟踪问题的研究已获得越来越多的关注。由于群目标和扩展目标在量测过程上的相似性,许多文献把它们作为一类目标进行研究。Gilholm和Salmond[3]假设每个时刻接收的量测数为泊松分布,在此前提下提出一种扩展目标跟踪方法。Boers等人[4]采用类似的方法对具有一维扩展特性的“竿”形目标进行联合检测和跟踪。Mahler[5]在文献[3]所提模型的基础上推导了一种扩展目标概率假设密度(Extended Target Probability Hypothesis Density, ET-PHD)滤波器,并指出ET-PHD实现的前提是对量测集进行合理划分。Granström等人[6,7]利用高斯混合(Gaussian Mixture,GM)实现了Mahler提出的ET-PHD滤波器,称为ET-GM-PHD,并且提出了距离划分和子划分两种量测划分方法。但是在文献[6,7]中,为降低算法的复杂度,作者只估计了目标中心的运动特性,而忽略了对目标扩展的估计。其后,为实现扩展目标数目的更准确估计,Orguner[8,9]用高斯混合实现了带势估计的PHD滤波器。Koch[10]在假设扩展目标具有椭圆形状的前提下,提出了一种随机矩阵模型[11–14],对目标的运动状态采用高斯分布建模,扩展状态采用逆威沙特分布建模。Granström[11]提出了基于该模型的高斯逆威沙特PHD(Gaussian Inverse Wishart PHD, GIW-PHD)滤波器,弥补了ETGM-PHD无法估计目标扩展状态的不足,并且针对大小不同且空间邻近的扩展目标分别提出了预测划分和最大期望划分方法。此外,一些学者还提出了其他量测划分方法[15–17]。
目前,有关扩展目标跟踪的文献均直接或间接采用空间信息划分量测,在杂波密集情况下一些杂波量测可能在某些划分中被划入目标单元,从而降低目标扩展状态和运动状态估计的准确度。为解决这一问题,将目标和杂波的幅度信息(Amplitude Information, AI)引入GIW-PHD滤波器,通过为量测单元叠加幅度似然,增大目标量测单元的权重,降低包含杂波的量测单元的权重,从而达到抑制杂波的目的。此外,为了降低杂波对计算中心量测的干扰,采用幅度加权的方法计算量测单元的质量中心,以取代文献[11]中的几何中心,从而可以获得更准确的中心量测估计,并进一步提升对扩展目标的状态估计准确度。
2 GIW-PHD滤波器
2.1 基本模型
假设每个扩展目标的运动状态服从线性高斯模型


其中, Ts为 采样间隔, Σ为 标量加速度标准差, θ为机动相关时间。
k时刻目标产生的量测集表示为

杂波量测数也采用泊松分布建模,单个时间单位体积内的泊松率为 βFA,k, 观测区域的体积为 V,因此单位时间内杂波量测的均值为 βFA,kV。
2.2 GIW-PHD的具体实现
GIW-PHD滤波器[11]采用高斯逆威沙特分布的混合来近似 k时刻扩展目标的PHD

运动状态的协方差和扩展状态的估计为

其中, s为目标运动状态的维度。
GIW-PHD滤波器的具体滤波过程见文献[11],为节省篇幅,这里仅给出更新部分。
k时刻更新后的PHD为GIW的混合式


式(14)中的似然函数为

其中, |V|表 示 V 的 行列式,| W |表 示 W中的量测数。更新后GIW项的权重为

其中, wP为 某个划分 P 的 权重, dW为某个量测单元 W 的权重[11]。式(13)~式(17)中下标为 k |k-1的量表示从 k -1时 刻到k 时刻的预测值。
3 基于幅度信息的GIW-PHD滤波器
图1为扩展目标与量测的关系图。其中,T1和T2为两个大小不同的扩展目标,红色圆点为扩展目标的量测,C1~C3为杂波。由图中可见杂波C1距离目标量测较远,容易划入杂波单元;但是C2和C3距离目标量测较近,因而有可能在某种划分下被划入目标单元,导致目标扩展状态的估计误差,并影响运动状态的估计效果。这种情况下,仅利用空间信息已经很难区分目标和杂波的量测,一种可能的途径是利用目标和杂波的幅度信息。

图 1 扩展目标量测Fig. 1 Measurements of the extended targets
Lerro[18]建立了幅度信息模型。Clark[19]将这一模型引入了标准PHD滤波器,并且用仿真证明利用目标的幅度信息可以更好的区分目标和杂波。但他所采用的标准PHD滤波器本身仅适用于标准量测模型即点目标,并不适用于扩展目标跟踪场景[6]。本节给出结合幅度信息的GIW-PHD滤波器,称为AI-GIW-PHD滤波器。通过将目标和杂波的幅度信息引入GIW-PHD滤波器,可以增大只包含目标量测的单元的幅度似然,而降低包含杂波量测的单元的幅度似然。由于GIW-PHD在滤波时需要考虑所有可能的量测划分方法和量测子集,因此,这种操作的结果是估计目标扩展状态和运动状态时,仅包含目标量测的单元获得的权重增大,而包含杂波量测的单元的权重降低,从而抑制了杂波对状态估计的影响。
3.1 幅度信息建模
假定目标的幅度和运动状态相互独立,则 k时刻目标的量测似然函数 g (z|ξ)和杂波的量测似然函数 c (z)[19]可分别表示为

其中, τ为检测门限。则过门限检测后,目标和杂波的幅度似然函数分别为
3.2 Rayleigh杂波下目标的幅度似然函数
当杂波为复高斯分布且幅度为Swerling 1型起伏时,杂波和目标的幅度为Rayleigh分布。杂波幅度的概率密度函数(Probability Density Function,PDF)为[19]

其中, σn为复高斯分布的协方差。目标幅度 Ak的PDF为

其中, σt为目标幅度的均方值。则目标加杂波的幅度的PDF为

由于信杂比的定义[19]为

将 σn和 α代入式(29)可得

3.3 AI-GIW-PHD滤波器
下面给出AI-GIW-PHD的具体算法。
由于AI-GIW-PHD只改进了GIW-PHD的更新部分,而预测部分保持不变,因此这里只给出AIGIW-PHD的更新步骤。
每个单元中所有量测的似然函数为

3.4 中心量测的计算
根据式(15(e)),当计算某个单元的中心量测时,对该单元中的所有量测取几何平均值。然而,当该单元中混入了杂波量测时,采用这一方法将导致计算得到的中心量测偏离真实的中心量测,从而增大状态估计误差。为解决这一问题,计算中心量测时,采用幅度加权的方法来计算量测的质量中心,以取代式(15(e))中所用的几何中心

其中,幅度的加权因子 ω(i)为
其中, a(i)为 量测i的幅度。
通过幅度加权,当量测单元中包含了杂波时,由于通常情况下杂波的幅度小于目标量测的幅度,因此能够更多地利用目标量测的信息,并减少杂波对中心量测的影响。
4 仿真
为检验所提AI-GIW-PHD算法的性能,通过仿真实验将其与标准的GIW-PHD滤波器进行对比。
4.1 仿真设置
雷达观测区域的面积为[–500, 500] × [–500,500] m。在总计31 s的观测时间内有4个目标进入观测区域。目标的真实航迹如图2所示。图中每种颜色的航迹代表一个目标,可以看到有2个扩展目标为匀速直线运动,另外2个目标为匀速转弯运动,且目标的航迹之间出现了多次交叉。
目标的真实扩展为

其中, R(i)为旋转矩阵,用于保证目标的主轴平行
k于目标的运动方向, υi和 ιi分别为长轴和短轴的长度。本文仿真主要考察幅度对跟踪性能的影响,因此4个目标的长短轴均为 (υi,ιi)=(20,5)。扩展目

每个扩展目标产生的量测,在幅度上均独立的服从参数为 σt的Rayleigh分布,且在帧间独立的服从Swerling 1型起伏。
杂波在每一帧的总数服从均值为1000的泊松分布,虚警率为0.05,则理论上每一帧的虚警数服从均值为50的泊松分布。
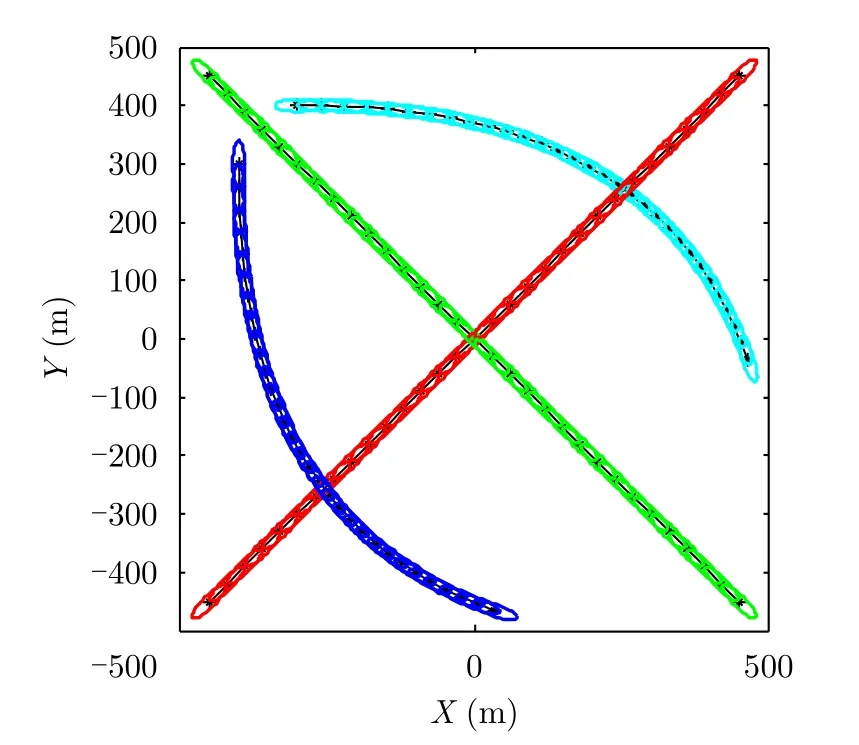
图 2 扩展目标真实航迹(SCR=13 dB)Fig. 2 Real trajectories of the extended targets (SCR=13 dB)
设置目标的信杂比分别为SCR=13 dB和SCR= 6 dB。本文通过计算每种算法的OSPA误差[20]来评价算法的跟踪性能。
4.2 仿真结果
图3,图4为SCR=13 dB时未利用幅度信息的GIW-PHD和利用幅度信息的AI-GIW-PHD在某次仿真中的航迹滤波结果。图3中,黑色“*”表示目标真实位置,红色“O”表示状态估计值。从该图可以看到,GIW-PHD出现了比较明显的航迹漏检现象。这是因为当杂波率较高时,目标量测与杂波量测有可能相距很近,状态估计容易受到杂波的干扰,导致一些GIW项权重降低,从而估计出的目标数目也会减少。图4中,蓝色“.”表示目标真实位置,黑色“O”表示状态估计值。可以看到,利用了幅度信息的AI-GIW-PHD可以非常准确地估计出目标航迹,基本上没有漏检。这是因为,由于采用了幅度信息,相距较近的目标和杂波的量测能够得到更好的区分,从而降低了杂波对目标GIW项的干扰。
图5为GIW-PHD在该次仿真中的扩展状态估计结果。图5中绿色填充带表示目标的真实扩展状态,红色椭圆表示GIW-PHD估计出的目标扩展状态。可以看到,由于存在大量的航迹漏检,GIW-PHD对目标扩展状态的估计也出现了大量漏检。当能够估计出目标航迹时,GIW-PHD也能够比较准确地估计出目标的扩展状态,但在滤波开始时刻还存在比较明显的估计错误。

图 3 GIW-PHD单次航迹估计结果(SCR=13 dB)Fig. 3 Track estimation of the GIW-PHD in a run (SCR=13 dB)
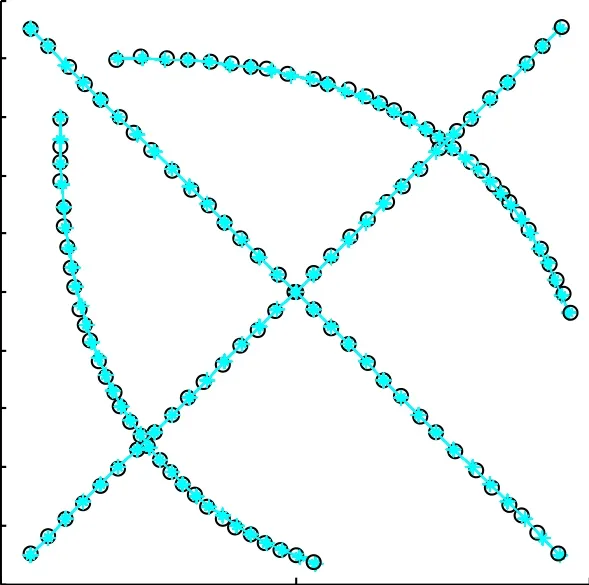
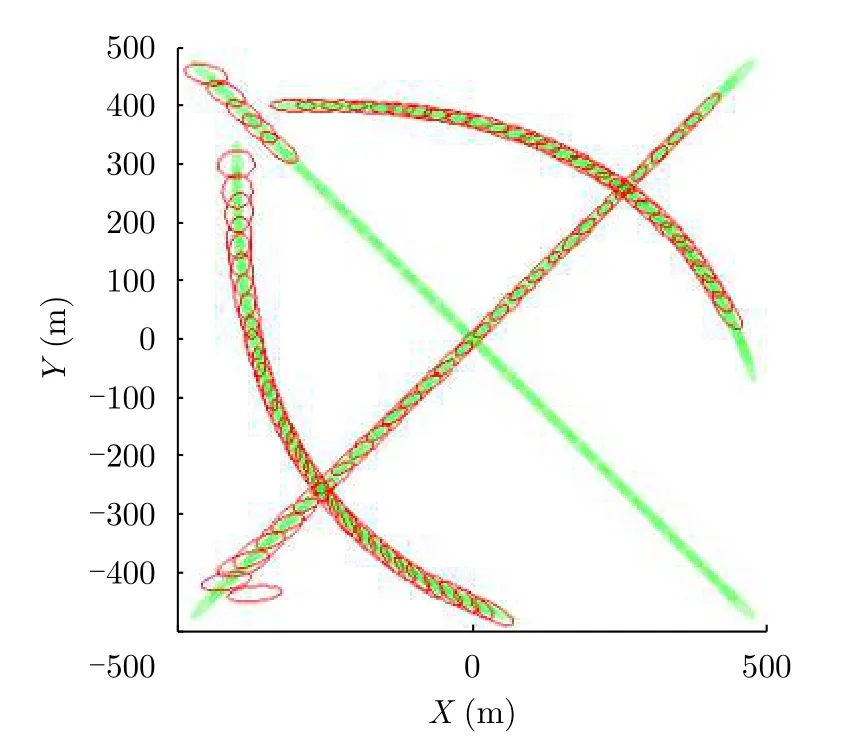
图 5 GIW-PHD单次扩展状态估计结果(SCR=13 dB)Fig. 5 Extended state estimation of the GIW-PHD in a run (SCR=13 dB)

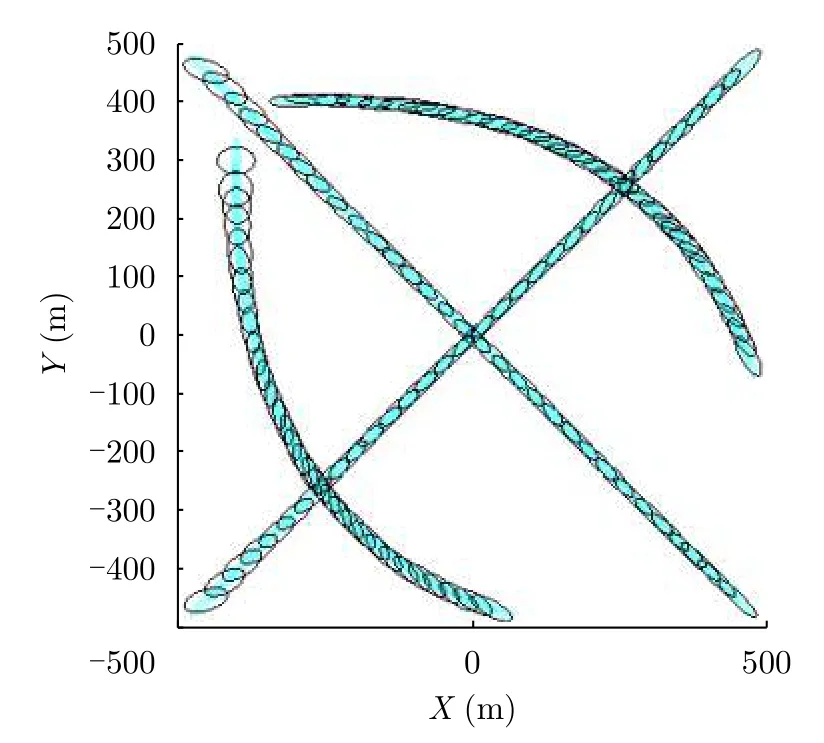
图 6 AI-GIW-PHD单次扩展状态估计结果(SCR=13 dB)Fig. 6 Extended state estimation of the AI-GIW-PHD in a run (SCR=13 dB)
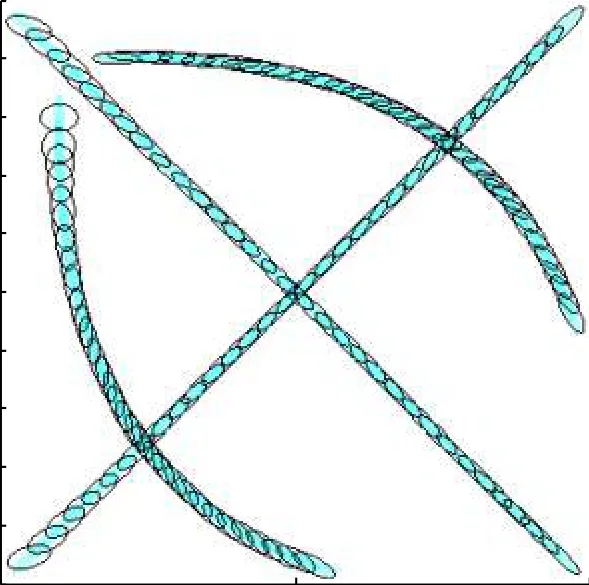
图6为AI-GIW-PHD在该次仿真中的扩展状态估计结果。图6中蓝色填充带表示目标的真实扩展状态,黑色椭圆表示AI-GIW-PHD估计出的目标扩展状态。可以看到,AI-GIW-PHD始终能够比较准确地估计出目标的扩展状态,并且在滤波初始时刻也没有出现明显的错误估计。
图7为SCR=13 dB时GIW-PHD和AI-GIW-PHD经过20次蒙特卡洛仿真后统计得到的平均OSPA位置误差。可以看到,在大部分时刻AI-GIW-PHD的误差比GIW-PHD稍大一些。但是,这并不能说明AI-GIW-PHD的滤波性能不如GIW-PHD。这是因为与单目标跟踪时位置误差的计算不同,多目标跟踪时OSPA位置误差的计算需要统计所有航迹的滤波误差。由于GIW-PHD出现了明显的航迹漏检,用于误差统计的航迹数少于AI-GIW-PHD,因而统计得到的OSPA位置误差小于AI-GIW-PHD。当GIW-PHD不发生漏检时,其位置误差会更大。这与文献[19]中的情况相似。虽然从图7无法直接判定GIW-PHD和AI-GIW-PHD的滤波性能,但是根据图3、图4可以看到,当没有漏检时,这两种算法都能够准确地跟踪目标。
图8为SCR=13 dB时GIW-PHD和AI-GIW-PHD经过20次仿真后得到的平均目标数目估计值。可以看到,随着滤波的进行,GIW-PHD总体上会出现越来越明显的数目欠估计现象。这是因为杂波对GIW项的干扰越来越严重。相比之下,结合了幅度信息的AI-GIW-PHD始终保持了对目标数目的准确估计。这是因为,通过利用幅度信息,杂波与目标量测的区分会更加容易,从而使GIW项受到的杂波干扰显著下降。
图9为SCR=13 dB时GIW-PHD和AI-GIW-PHD经过20次仿真后得到的平均OSPA势误差。通过该图,可以更加清楚地看到在目标数目估计方面,AI-GIW-PHD显著优于GIW-PHD。这再次证明了幅度信息对扩展目标跟踪的有效性。
图10为SCR=6 dB时GIW-PHD和AI-GIW-PHD经过20次仿真后统计得到的平均OSPA位置误差。结合图10和图7可以看到,随着SCR从13 dB降到6 dB,未采用幅度信息的GIW-PHD的跟踪误差明显增大,而采用了幅度信息的AI-GIW-PHD的跟踪误差变化不大。这是因为当SCR降低后目标的检测概率也会下降,因而GIW-PHD算法中GIW项受到的杂波干扰会大大增加,导致状态估计出现较大偏差。相比之下,AI-GIW-PHD由于利用了幅度信息从而能够较好地区分目标和杂波,减轻了GIW项受到的杂波干扰,保持了状态估计的准确度。

图 7 平均OSPA位置误差(SCR=13 dB)Fig. 7 Averaged OSPA location error (SCR=13 dB)

图 8 平均势估计结果(SCR=13 dB)Fig. 8 Averaged cardinality estimation (SCR=13 dB)
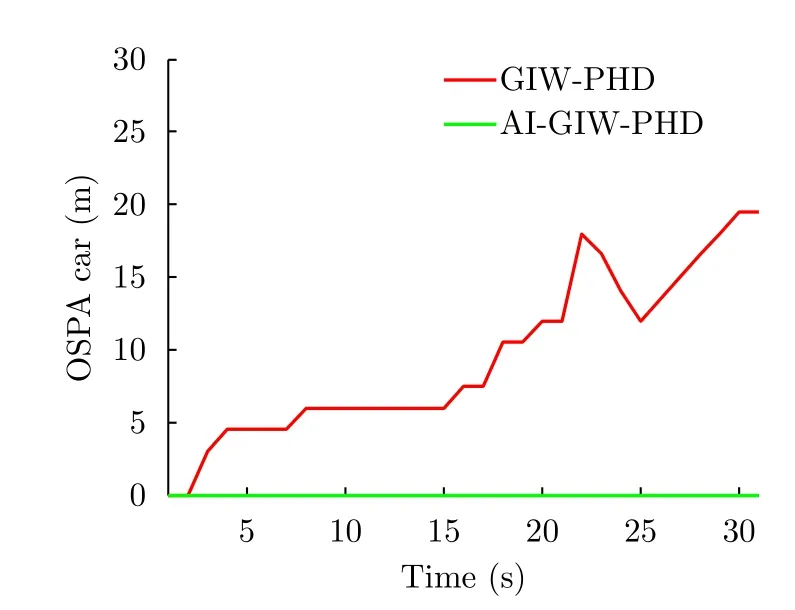
图 9 平均OSPA势误差(SCR=13 dB)Fig. 9 Averaged OSPA cardinality error (SCR=13 dB)
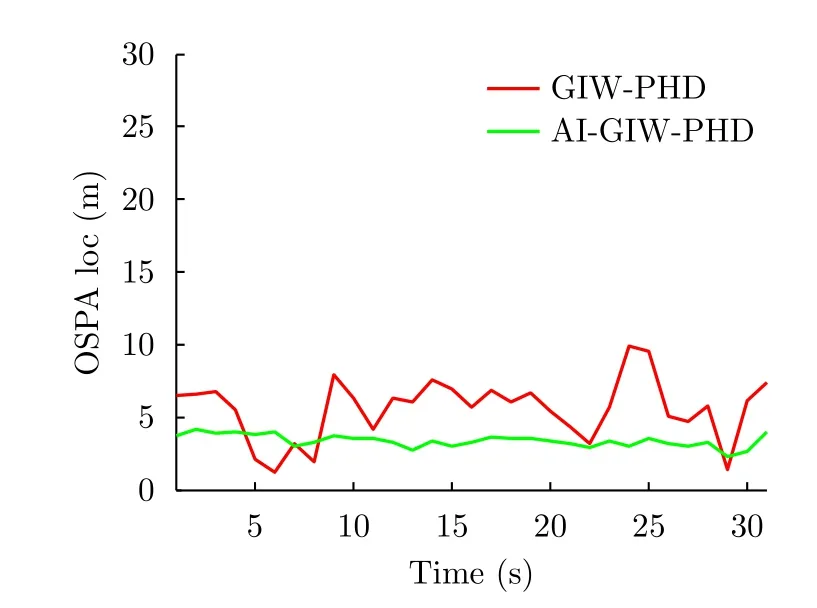
图 10 平均OSPA位置误差(SCR=6 dB)Fig. 10 Averaged OSPA location error (SCR=6 dB)
图11 为SCR=6 dB时GIW-PHD和AI-GIW-PHD经过20次仿真后得到的平均目标数目估计值。可以看到,在低SCR条件下,GIW-PHD由于受到杂波的干扰导致目标数目估计始终存在很大的误差,而AI-GIW-PHD在大部分时刻保持了对目标数目的准确估计,仅在倒数第2帧出现了比较明显的偏差。
图12为SCR=6 dB时GIW-PHD和AI-GIW-PHD经过20次仿真后得到的平均OSPA势误差。可以看到,与图11显示的结果一致,AI-GIW–PHD在目标数目估计方面显著优于GIW-PHD。
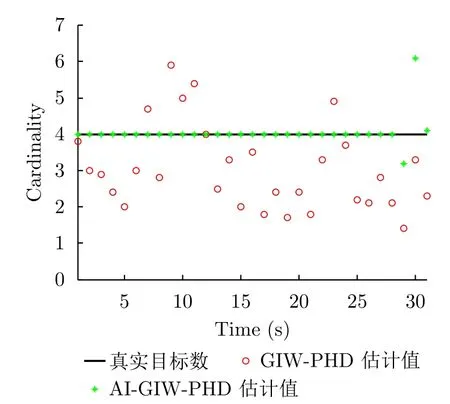
图 11 平均势估计结果(SCR=6 dB)Fig. 11 Averaged cardinality estimation (SCR=6 dB)
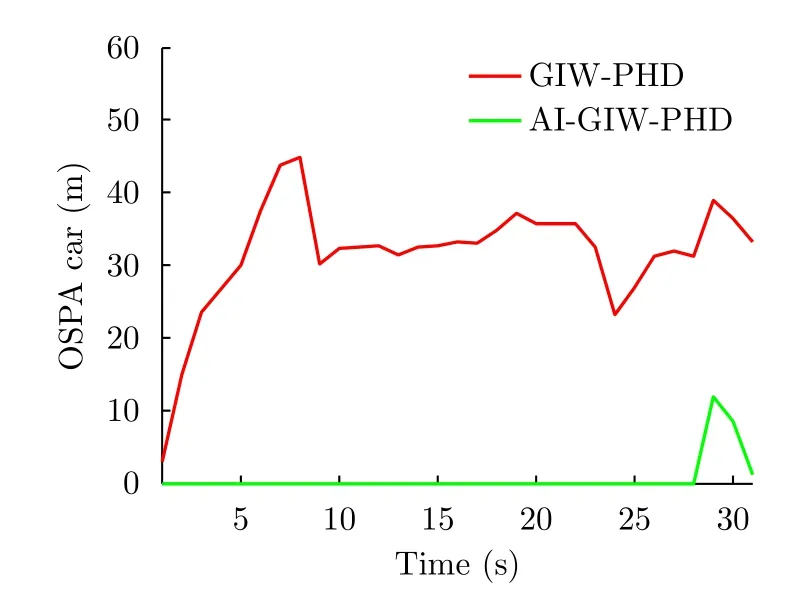
图 12 平均OSPA势误差(SCR=6 dB)Fig. 12 Averaged OSPA cardinality error (SCR=6 dB)
5 结束语
GIW-PHD扩展目标滤波器在进行量测划分和状态估计时都只利用了量测的空间信息,在杂波密集环境下状态估计和势估计性能不佳。为解决这一问题,提出了结合幅度信息的GIW-PHD滤波器,利用量测的幅度信息来区分相距较近的目标和杂波量测,赋予目标量测单元更高的似然值,从而提升目标GIW项的权重,降低杂波的影响。在计算量测单元的中心时采用幅度加权的质量中心取代仅包含空间信息的几何中心,从而进一步降低杂波的干扰。仿真结果表明,所提算法对扩展目标的势估计性能显著增强,在低信杂比环境下的状态估计性能明显优于GIW-PHD滤波器。但是,计算幅度似然会在一定程度上增加算法的运算成本。
猜你喜欢
科学与信息化(2021年30期)2021-12-24 08:00:20
青年歌声(2019年12期)2019-12-17 06:32:32
宇航计测技术(2018年3期)2018-09-08 02:21:24
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
制造业自动化(2017年2期)2017-03-20 14:26:17
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
西北工业大学学报(2015年3期)2015-12-14 13:08:44
遥测遥控(2015年2期)2015-04-23 08:15:22
舰船科学技术(2015年8期)2015-02-27 15:38:47
股市动态分析(2014年27期)2014-07-29 19:40:43