复杂狭长带状地形下基于INPHO的空中三角测量
2020-09-03 03:56:40赵峻天高永涛
矿山测量 2020年4期
姚 睿,赵峻天,高永涛
(1.陕西能源职业技术学院实践教学管理处,陕西 咸阳 712000; 2.陕西能源职业技术学院资源与测绘工程学院,陕西 咸阳 712000)
INPHO摄影测量系统是世界著名的航空摄影测量与遥感处理软件,可全面系统的处理航测遥感、激光、雷达等数据[1],由于其处理数据精度高[2],目前在中国受到大多数同行的青睐。对地势平坦或地形起伏较小的测区进行无人机航拍,用INPHO软件制作DOM有较强的优势,体现在INPHO能快速、准确地进行特征点的匹配以及光束法区域网平差,进而生成高精度的DOM[3]。然而对于地形起伏较大、测区面积较大的狭长带状测区,用INPHO软件制作DOM会遇到两个问题:第一,用INPHO软件处理影像时必须输入测区平均地形高[4],地形高输入的准确性直接关系到空中三角测量的精度,对于地形起伏较小的地区,可以通过各种渠道获得与当地真实平均地形高相近的数值,从而获得高质量的空三成果[5]。然而对于地形起伏较大的大面积狭长测区,即使获得与测区真实平均地形高一致的高程也无法进行连接点匹配,进而无法完成空三加密。为此INPHO软件采取初始DTM引导的方法进行空三加密[6],但遗憾的是,对于地形起伏较大的狭长测区,即便序列影像重叠度较高,空三加密效果也并不理想。第二,用无人机进行低空摄影测量,飞行器飞行姿态势必会受到风速的影响,导致序列影像的排列和预先设计的航带之间有一定的偏差[7]。
如果用INPHO摄影测量系统对复杂狭长带状区域进行传统的空中三角测量显然不能满足一定的精度要求。本文从处理复杂地区的空中三角测量时遇到的问题出发,经分析和验证,得到了一种适合地形起伏较大的狭长地带的空三加密新方法。
1 地形起伏较大测区的空三加密方法
1.1 线性内插
为了解决地形起伏较大的复杂地形下INPHO软件不能较好的处理狭长测区影像的问题,现采取一种比较实用的新方法,其基本思路为:在处理影像时,首先进行分区,把高差变化不大于140 m的范围看成一个子区,这里提到的“140 m”是按穷举法以5 m为步长由400 m到50 m依次经实验验证得到的,当分区内地形高差为400 m时,空三加密无法完成;当分区内地形高差为140 m时,空三加密能顺利的进行,匹配的连接点分布均匀,每张像片上连接点的数量均大于100(经验值为100,若小于100,表明连接强度弱,匹配效果不理想),且空三精度趋于稳定;若再减小分区内地形高差,则空三加密精度不会有明显的提高,反而增加了工作量。其次,不需要以子区为单元生成格网间距为10 m左右的DTM(格网间距越小,生成DTM耗时越多,数据占磁盘空间越大,此时的DTM只是起引导的作用,以便顺利完成空中三角测量,而格网间距为10 m左右的DTM足以起引导作用),直接对每个子区进行合理的内插,以便求出子区的平均高程。最后,根据子区的平均高程以子区为单位依次处理影像。
众所周知,由于地面的起伏,每个子区都是曲面,但在局部很小的范围内,曲面可近似看作平面[8],为了方便、简洁、快速的求出每个子区的准确平均高程,本文采用线性内插法[9],应用子区内三个点,即像控点,其高程的观测值分别为Z1、Z2、Z3,则可确定一个平面,从而求出一个新的高程Zp(其平面坐标为X,Y):
ZP=a0+a1X+a2Y
(1)
参数a0、a1、a2由三个像控点组成的线性方程组求出,若将坐标X,Y以第一点为原点计算,则有:
(2)
从中解出:
(3)
据此得到斜面方程为:
(4)
写成权函数形式为:
(5)
其中,gi(X,Y)表示第i个数据点对内插点的作用大小。
1.2 对原始POS数据平差
无人机在进行航拍时,因受到风的影响会产生系统误差,当顺风飞行时,会使航带内的序列影像排列较松弛,当逆风飞行时,会使航带内的影像排列较紧凑,若飞行时受到侧面的风,相邻航带间抑或挨得紧凑或松散,为了削弱系统误差,可在空三加密的过程中,把原始的POS数据提供的phi、omega、kappa值用空三加密时生成的log文件中改正后的phi、omega、kappa的平差值代替,然后重新进行空三加密,这样空三加密的精度会大幅提高。
2 实验
2.1 实验区概况
测区位于甘肃省陇南市西和县境内,面积共203.3 km2,范围包括洛峪镇、大桥镇、西高山乡,蒿林乡,太石河乡,地势由西北向东南倾斜,地形变化极大。测区最低高程为860 m,最大高程为1 823 m,用搭载索佳相机的无人机共飞行3个架次,其相机参数如表1所示,现选取第二架次中的462张序列影像作为实验对象,实验区面积为62.56 km2,其中第三子区范围为25.21 km2,有像控点12个,包含三个检查点,其余9个点作为控制点。
2.2 空中三角测量
2.2.1 传统空中三角测量
把准备好的数据导入Inpho 8.0摄影测量系统中,生成航带时没有进行分区,经查看,相机参数输入正确,POS数据导入正确,无人机序列影像排列无误,在导入数据的过程中,实验区平均地形高是根据像控点的坐标大致估算的[10],现进行连接点提取及光束法区域网平差,然而由于地形起伏大及所估算的平均地形高不准确的缘故,导致某些区域无法进行连接点的提取及光束法区域网平差,程序自动终止运算,导致空三加密失败。
2.2.2 用初始DTM引导
对序列影像进行分区,对每个子区重新估算平均地形高,因部分子区仍无法进行连接点的匹配,需进行初始DTM引导,即先生成10 m左右格网间距的DTM,然后进行空中三角测量[10],但部分照片空三加密的连接点仍然太少,有些照片只有几个连接点,还有部分照片没有连接点,由于连接点的强度明显不够,且部分连接点误差太大,因此加密的成果无法应用,如下图1(第三子区的局部空三加密图,其中第三子区共有148张照片)生成的连接点所示、其连接点匹配及自由网平差精度如表2所示。
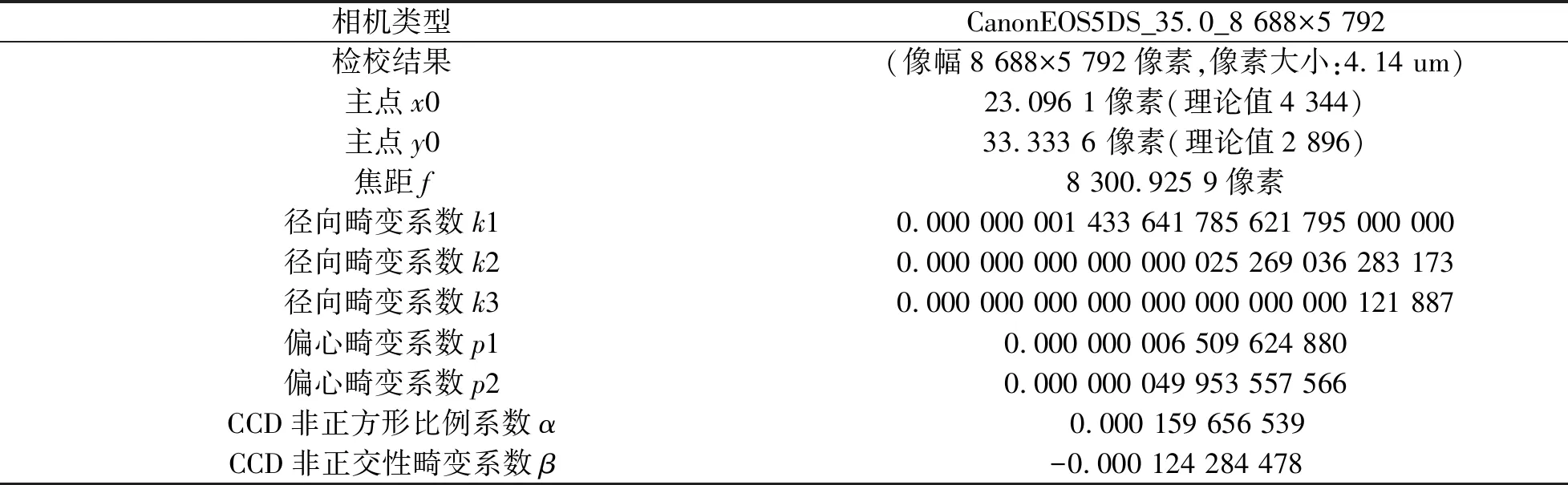
表1 相机参数

图1 生成稀疏的连接点

表2 连接点匹配及自由网平差精度
2.2.3 分区并线性内插
为了能顺利的完成高精度的空中三角测量,现采用本文提出的方法,即先分区并用线性内插法对各分区进行重新计算平均地形高,然后依次处理各子区。若相邻两子区的平均地形高之差大于140 m,应在两分区之间再分一个子区,现对实验区进行影像处理,按此方法进行空三加密,一段时间后,顺利完成空三加密,第三子区sigma0的收敛值为1.860 9 μm(见表3),完全满足一定的精度要求,其空三加密生成的大量均匀连接点如图2(局部图)所示,生成的整个子区连接点分布情况如图3所示,从图中明显可以看到各照片上连接点分布均匀且数量在100个以上,其连接点匹配及自由网平差精度如表3所示。
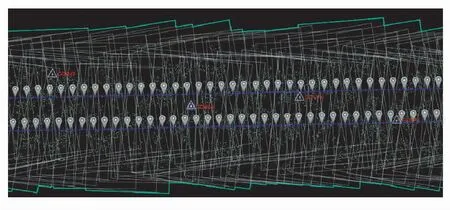
图2 生成一定密度的均匀连接点

表3 连接点匹配及自由网平差精度
2.3 精度评定
由表2可知,在地形起伏较大的大面积狭长地带的空中三角测量中,用初始DTM引导的方法得到的sigma0的值为106.368 μm,地面点中误差很大,其中,X方向中误差为6.259 2 m,Y方向中误差为10.127 6 m,高程中误差为26.243 7 m。因而空三成果精度很低。由表3可知,对测区进行分区并对其进行线性内插获取子区准确平均高程的方法得到的sigma0的值为1.860 9,地面点X方向中误差为0.053 7 m,Y方向中误差为0.075 1 m,高程中误差为0.230 3 m,为了进一步证明新方法有较高的精度,现对地面控制点的精度进行分析,表4为地面控制点残差及中误差,表5为检查点的残差及中误差,由表4可知,9个控制点中,X方向的最大残差值为-0.056 8 m,Y方向的最大残差值为-0.091 2 m,高程最大残差值为0.389 1 m,X方向中误差为0.038 0 m,Y方向中误差为0.071 1 m,高程中误差为0.268 5 m。由表5可知,3个检查点中,X方向的最大残差值为-0.160 1 m,Y方向的最大残差值为-0.198 9 m,高程最大残差值为0.543 6 m,X方向中误差为0.149 8 m,Y方向中误差为0.207 0 m,高程中误差为0.548 5 m。经精度评定,改进后的空中三角测量精度高,用此方法获得的空三成果完全满足一定的生产要求。

图3 连接点分布情况

表4 地面控制点残差及中误差
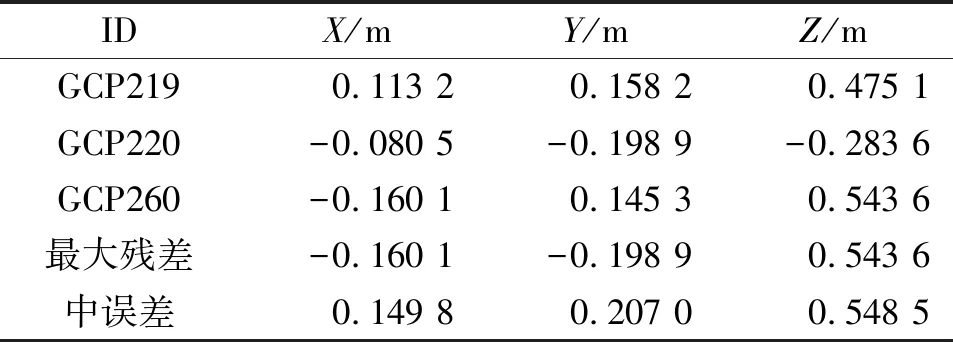
表5 检查点残差及中误差
2.4 优化POS数据
为了进一步提高空三精度,把空三改正后的POS平差值重新导入软件中,再次进行空三加密,其加密精度如下表6~7所示,表6为POS优化后的控制点残差及中误差,其中,X方向中误差为0.031 3 m,Y方向中误差为0.062 0 m,高程中误差为0.261 8 m,对比表4和表6可知,POS数据优化后的空三精度明显高于优化前的空三精度,其中,X方向精度提高6.7 mm,Y方向精度提高9 mm,高程精度提高6.7 mm。因在空三加密中,控制点参与了平差运算,有一定的权重,而检查点不参与平差运算,只起检核与验证作用,所以检查点的精度更可靠,表7为POS优化后的检查点的残差及中误差,其中,X方向中误差为0.143 7 m,Y方向中误差为0.197 5 m,高程中误差为0.538 0 m,对比表5和表7可知,X方向精度提高6.1 mm,Y方向精度提高9.5 mm,高程精度提高9.5 mm。由此可知,尽管无人机在空中易受风速、空气密度、大气温度等影响,导致POS数据不准确,但通过优化POS数据可进一步提高空三精度。

表6 POS优化后的控制点残差及中误差
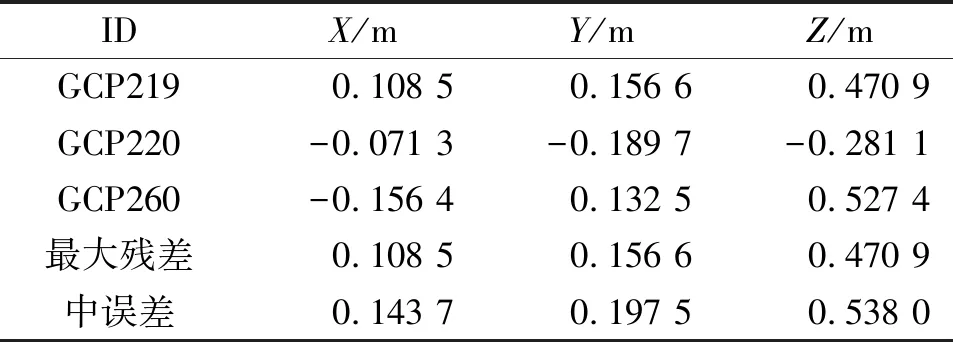
表7 POS优化后的检查点残差及中误差
3 结 语
用INPHO软件处理复杂地形狭长区域无人机影像空三加密的过程中,因地形起伏过大的问题,导致无法进行空三加密,为此,可以在分区的情况下,无需用初始DTM引导,而是直接用线性内插获得子区的准确平均地形高,即可使问题迎刃而解,最终生成满足一定精度的空三成果。若用空三后的POS平差值作为起算数据重新进行空三加密,则空三精度会进一步提高。
虽然本文给出的方法解决了大面积狭长高山地区航空影像空三加密精度低的问题,但是此方法需要一定数量的像控点,而复杂地区测量像控点不方便,既耗费人力又耗费时间,如果从谷歌地球中获取部分地面点的高程结合少量像控点,然后用线性内插的方法求得子区的平均地形高,测试能否完成空三加密以及精度是否满足要求,是进一步需要研究的问题。
猜你喜欢
交通运输研究(2021年6期)2021-02-11 15:00:26
交通运输系统工程与信息(2020年6期)2021-01-04 09:35:30
写真地理(2020年39期)2020-12-23 02:01:59
计算机工程(2020年12期)2020-12-16 02:40:48
理论与创新(2020年15期)2020-10-09 11:07:45
河南城建学院学报(2020年3期)2020-08-14 01:08:38
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
企业科技与发展(2018年5期)2018-09-10 00:20:39
城市道桥与防洪(2018年8期)2018-08-18 05:46:06
汽车文摘(2016年6期)2016-12-07 00:23:38