
基于三维激光点云数据获取树木几何参数的研究
2020-09-01 05:37王天罡贾红波梁兵琳张丽华朱佳琦
陕西林业科技 2020年2期
王天罡,贾红波,梁兵琳,张丽华,李 虹,朱佳琦
(1.北京市京西林场,北京 102300;2.北京市林业勘察设计院,北京 100029)
单木树高、树种、冠幅及单木位置是森林资源调查的重要因子。传统林业调查方法工作量大,强度高,周期长。随着林业信息技术的高速发展,森林调查的技术手段日臻完善,无人机遥感系统具有机动、快速、分辨率高、适用范围广等优点,适合林业调查的工作要求,能增强林业调查工作能力,同时相较于卫星和航空遥感技术,不仅购买及维护成本相对较低,对操作人员的技能要求也不太高[1]。激光雷达技术能够同时获取森林冠层表面的水平和垂直结构信息,基于高密度的激光雷达点云不仅能够获取林分尺度森林参数,还能提取单木尺度的森林参数。利用无人机Demetrios等[2]对多样性丰富的雨林进行树高测量,李亚东等[4]估测了森林蓄积,树高及冠幅提取精度近90%。杨坤等[3]利用高分辨率影像进行了树木高度提取,发现法桐的测高精度明显高于圆柏,Andersen等[5]利用点云技术建立树木模型,绘制了单木高度及冠幅图。
本研究采用大疆六翼无人机搭载激光雷达及云台相机,通过获得地面DEM、三维点云数据和专业软件,进行数据处理分析,获取单株树木点云,从而确定树木位置、株数、树高、树冠直径等信息,并与实测值比较,以确定该方法的可行性。
1 研究区概况
试验地京西林场木城涧分场位于北京市西部,东经115°40′~116°38′,北纬39°40′~40°10′,森林植被覆盖度高,垂直分布明显。天然林树种主要有栓皮栎(Quercusvariabilis)、栾树(Koelreuteriapaniculata)、山杨(Populusdavidiana)。人工林主要树种有油松(Pinustabuliformis)、落叶松(Larixgmelinii)、臭椿(Ailanthusaltissima)等。
2 研究方法
2.1 设备及设施
调查实验用大疆M600pro六旋翼无人机(图1),最大载重6 kg,最大飞行高度500 m,GPS模式下无负载最大飞行速度为18 m·s-1。无人机搭载的大疆Z30型号云台相机,有效像素2 000万,单个像素大小为2.4 um,传感器焦距为10~1 200 mm,快门速度为1/30~1/6 000 s,照片最大分辨率为4K 60 fps H.264。无人机搭载的激光雷达扫描系统是LiAir 1000型激光雷达点云数据采集系统,高度集成了激光雷达扫描仪、GNSS和IMU定位定姿系统及存储控制单元,可实时、动态、海量采集高精度点云数据及丰富的影像信息。

图1 大疆M600pro无人机
实验当天天气晴朗,风力小于三级。数据采集时先在航线软件数字绿土Lidar中设定详细的飞行计划、飞行区域、航线和高度等(图2),设定实验飞行高度为120 m,飞行路线的航向重叠度和旁向重叠度分别为90%和95%。共拍摄50张航空正射影像,影像采集过程共耗时8 min,覆盖面积为0.02 hm2。
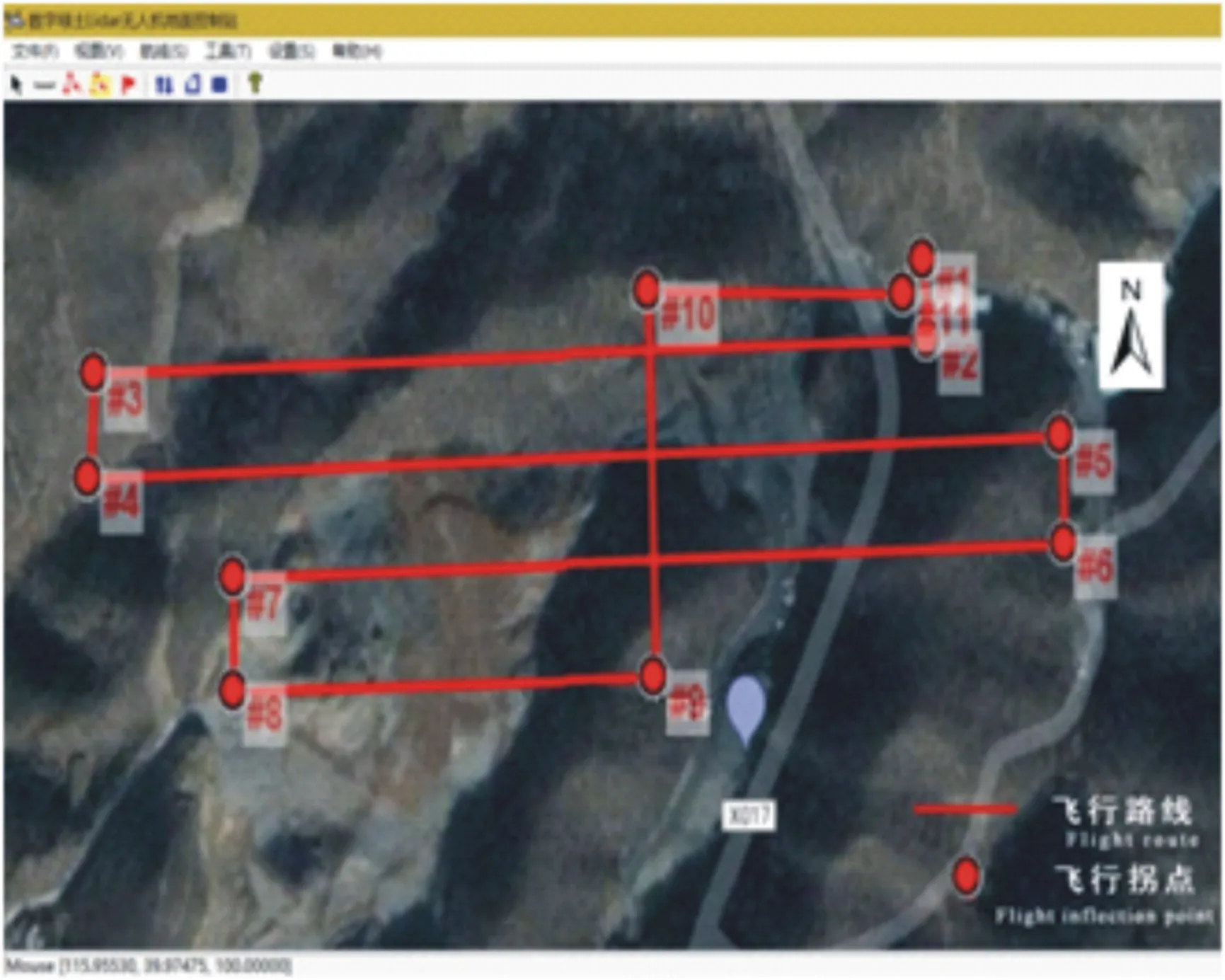
图2 无人机航线
2.2 数据处理
点云数据是三维坐标中的一组向量集合,无人机通过高度集成激光雷达扫描仪、GNSS和IMU定位定姿系统及存储控制单元,获取森林冠层的水平和垂直结构信息,采集高精度点云数据及丰富的影像信息,基于高密度的激光雷达点云获取林分尺度森林参数,再通过专业软件对点云数据进行分割,从而获取单木尺度森林参数。
点云数据处理流程如图3所示:(1)去除空中噪点,提高数据质量,从点云数据中分离地面点;(2)基于地面点生成DEM,利用DEM对点云进行归一化,去除地形影响;(3)对点云进行单木分割,获取单木位置、树高、树冠直径、树冠面积和树冠体积;(4)用ALS编辑工具对单木分割的结果进行检查,同时,可对种子点进行增加、删除等人工交互编辑;(5)并基于编辑后的种子点再次对点云进行分割,提高单木分割的准确性(图4)
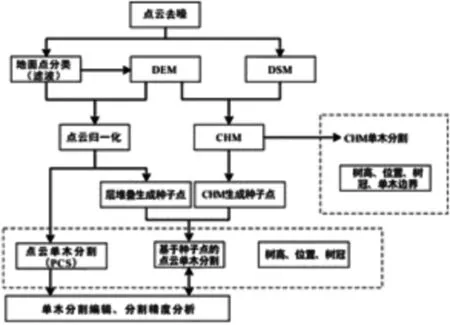
图3 点云数据处理流程
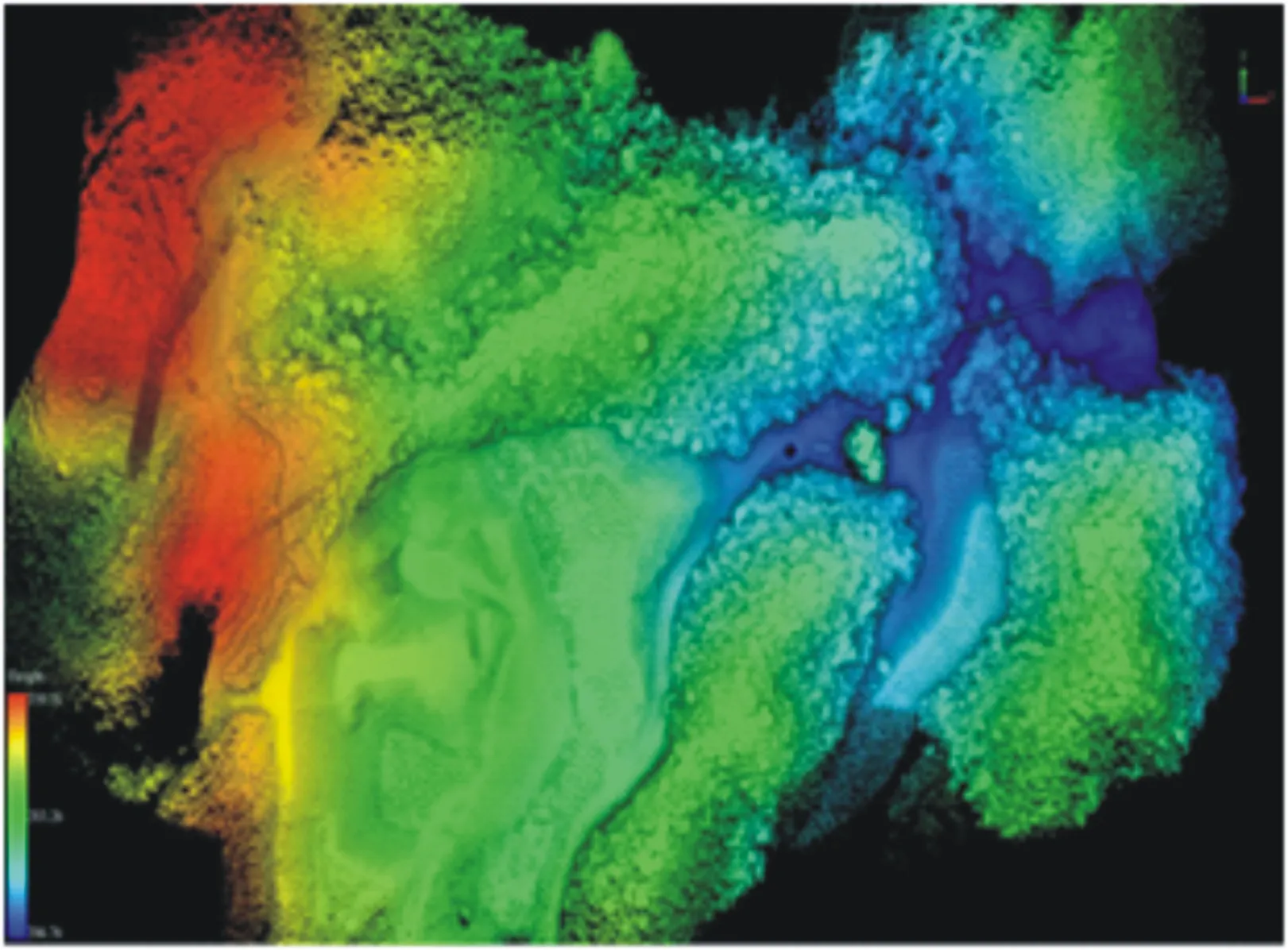
图4 样地点云效果
3 结果与分析
3.1 参数提取
三维点云数据经去噪处理后,采用层堆叠算法从归一化的点云数据中提取单木数据(图5)。本调查得到760万个三维点,生成样地三维点云。选取样地点云海拔在0~6 m范围,点云数据分割清晰的样木,能够对树高和冠幅数据进行有效提取(图6)。
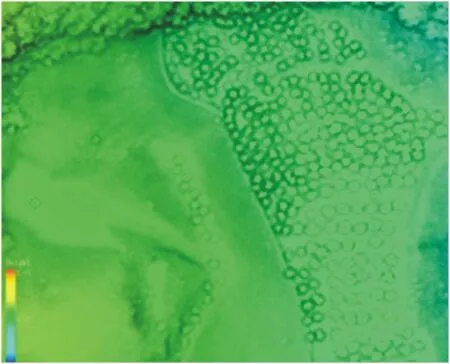
图5 点云提取效果(局部)
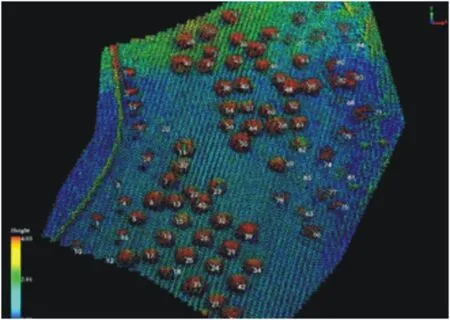
图6 点云数据归一化进行单木分割
3.2 树高提取与精度评定

航测树高值与实地测量树高值误差绝对值均低于43 cm,误差绝对值最大值为42.6 cm,最小值为0.3 cm,而相对误差最大为15.7%,最小为0.1%,平均相对误差-5.7%。从表1可以看出,绝对值在0~30 cm范围内的误差占绝大部分,其中0~10 cm范围内的误差占总株数的48.2%,0~20 cm误差范围占76.4%。经分析可知,树木高度提取结果的精度较高,表明利用无人机高分辨率影像进行树高提取的方法可取得较好的效果。
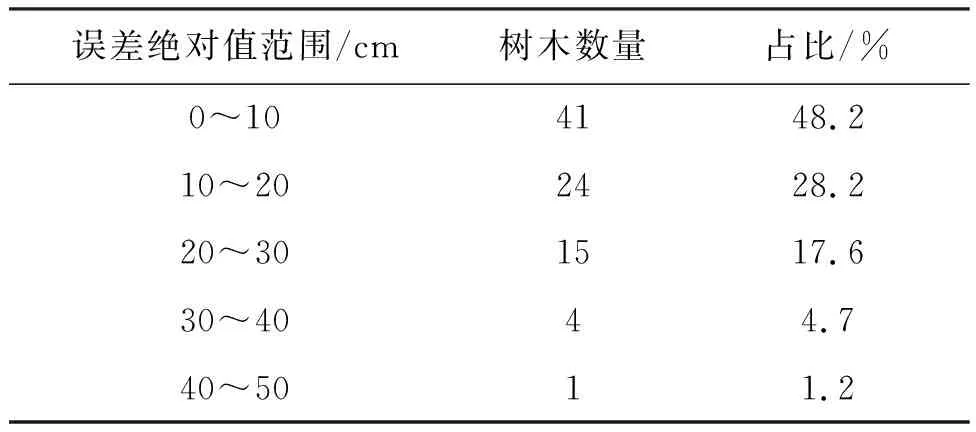
表1 树木高度误差绝对值范围统计
由表2看出,三个树种的高度标准误差白皮松和山桃非常接近,分别为14.87和14.71,臭椿的高度标准误差较高,为21.66。实验地为人工林,臭椿的栽植方式为裸根截杆苗,在相同影像空间分辨率条件下,顶端空间分辨率较低,造成臭椿的航测树高值误差较大。
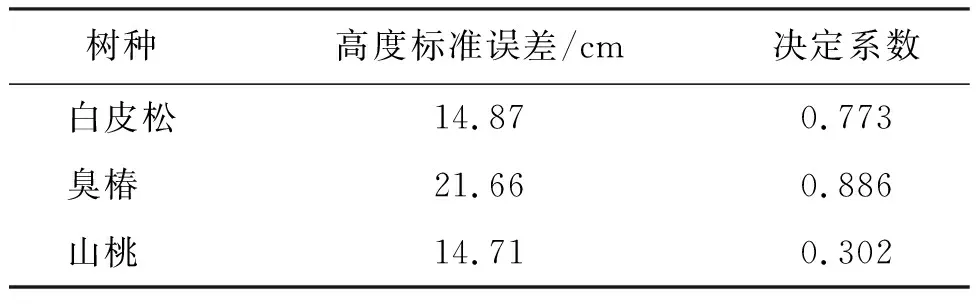
表2 不同树种树高的标准误差(RMSE)
三个树种航测树高值与实地测量树高值存在线性相关性(图7),决定系数分别为0.773、0.886、0.302。精度超过90%,基本满足林业调查与规划需要。
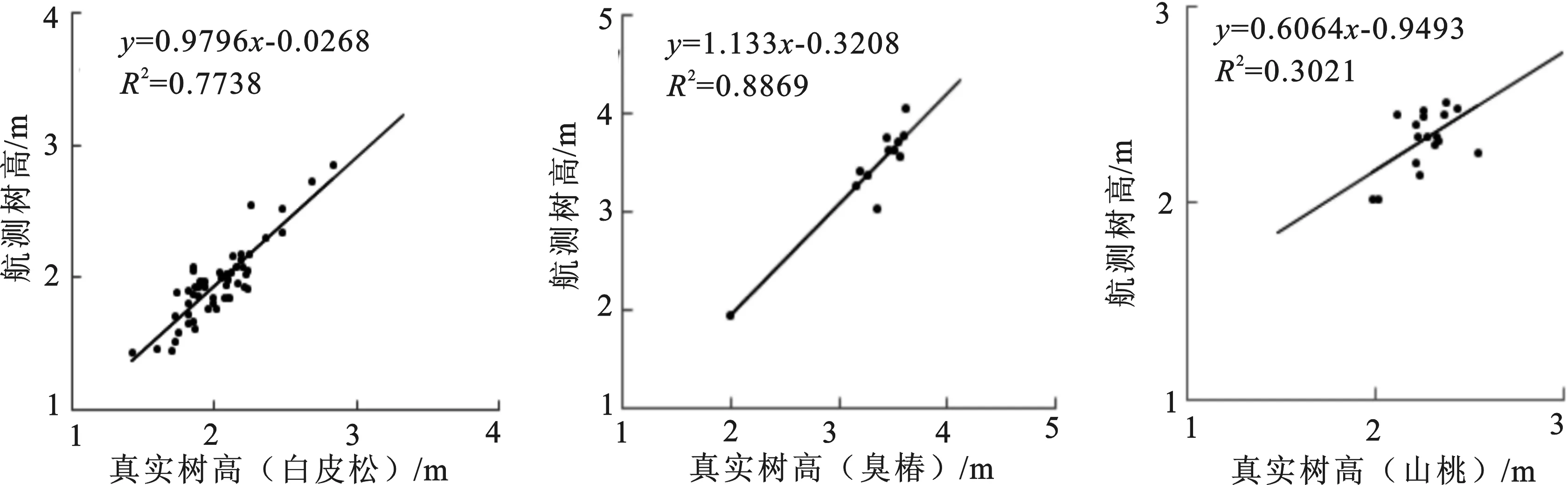
图7 不同树种的树木测量高度与真实高度比较
3.3 冠幅提取与精度评定
冠幅是样木南北和东西方向宽度的平均值。本次85株样木冠幅使用树下树冠投影直径确定冠幅大小。航测冠幅值与实地测量值误差绝对值均低于67 cm,误差绝对值最大66.3 cm,最小0.1 cm,而相对误差最大值为34.5%,最小值为0.1%,平均相对误差-10.25%。从表3可以看出,绝对值在0~20 cm范围内的误差占绝大部分,占样木总数的64.7%,经分析可知,对样木冠幅的提取达到林业测绘要求,利用无人机进行冠幅提取的方法可行。样地中无人机航测提取冠幅最高精度是0.99,最低精度是0.66,平均精度是0.89。
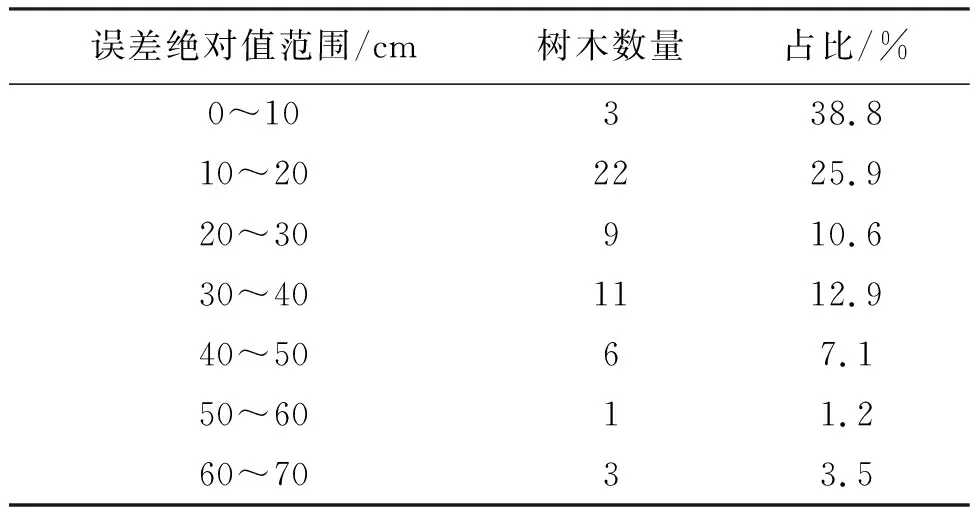
表3 树木冠幅误差绝对值范围统计
由表4可知,白皮松的冠幅标准误差为28.28,明显高于臭椿和山桃,与杨坤得出的圆锥形(圆柏)树冠顶端尺寸常常小于影像空间分辨率,导致不容易分辨;处理采集影像生成的圆锥形树冠点云数量也远远少于阔卵形树冠有结论一致[3]。冠幅提取精度白皮松不足88%,臭椿和山桃在90%以上,用无人机提取的冠幅精度与冠形有直接关系。
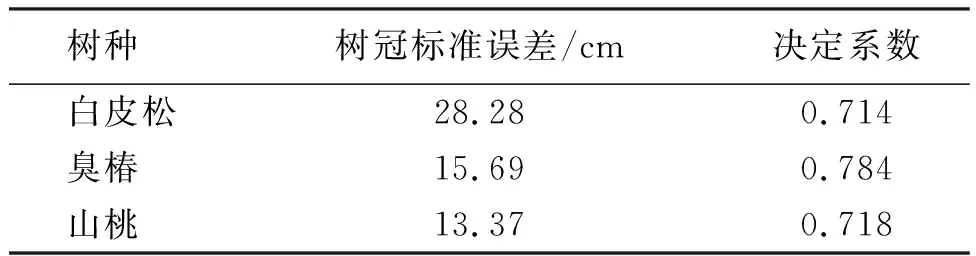
表4 不同树种树冠的标准误差(RMSE)
冠幅标准误差白皮松最大,为28.28,臭椿和山桃较小,分别为15.69和13.37,表明样木冠形对冠幅影响较大;不同树种的航测值和实地测量值存在线性相关关系(图8),白皮松、臭椿、山桃的决定系数分别为0.714、0.784和0.718。
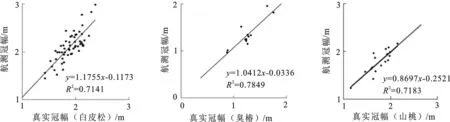
图8 不同树种的测量冠幅与真实冠幅比较
4 结果与分析
本调查研究结果表明,航测树高值与实地测量树高值误差绝对值均低于43 cm,提取平均精度为94%;航测冠幅值与实地测量冠幅值误差绝对值均低于67 cm,冠幅提取平均精度为89%,其精度基本满足林业调查与作业设计的需要。本研究对象为人工造林,树冠之间无叠加,提取的点云数据较为理想。
在森林郁闭度较高的情况下,无人机获取可靠性数据有一定局限性,难以获取树木的具体冠幅等信息,并且难以保证信息的精度。在后续研究中可以根据森林郁闭度的不同对无人机采集的数据精度进行探索。
猜你喜欢
安徽农业科学(2022年19期)2022-10-29
绿色科技(2022年11期)2022-07-02
农业工程学报(2022年4期)2022-04-24
绿色天府(2022年2期)2022-03-16
汽车观察(2021年8期)2021-09-01
林业科技情报(2021年3期)2021-09-01
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
文学港(2019年5期)2019-05-24
电子制作(2018年16期)2018-09-26
