
典型空中目标动态RCS特性仿真研究*
2020-09-01 02:08温包谦张济众
弹箭与制导学报 2020年2期
温包谦,王 涛,成 坤,张济众
(1 火箭军工程大学, 西安 710025; 2 火箭军装备部, 北京 100085)
0 引言
雷达目标的散射特性包括静态和动态两方面,在作战应用研究中动态散射特性具有更高的实际应用价值。获取目标的动态散射特性有外场动态测量和计算机仿真计算两种方式[1]。由于外场动态测量结果能准确反映目标的实际散射特性,因此世界各军事强国都很重视对目标特性测试场的建设与发展[2]。但由于外场动态测量场地要求和成本高,因此计算机仿真成为获取目标动态RCS特性的常用方法。
文献[3]根据运动姿态角变化和缩比模型的静态测量数据,获得了弹道导弹的动态RCS,但模型的精确度无法保证,从而影响了静态RCS准确性。文献[4]以典型目标F-117为研究对象,通过前期电磁散射特性仿真计算获得目标全空域静态RCS数据库的基础上,采用准静态法对目标机动时的动态RCS特性进行了仿真分析,为隐身飞机机动突防提供了仿真理论和实验依据,但只是对不同航路捷径下的动态RCS进行研究,没有对变化航迹下的RCS进行研究。文献[5]基于FEKO软件仿真计算战斗机的RCS,为战斗机的论证、设计和应用提供了数据依据,具有重要的现实意义,但只是分析了目标静态RCS,研究具有一定的局限性。
文中基于目标实际尺寸建立了精确的目标电磁计算模型,然后获得了目标全空域静态RCS数据库;依据目标的运动学特性,仿真了目标的不同飞行航迹;最后将航迹仿真结果和静态RCS数据结合起来,研究了典型空中目标动态RCS变化,得到不同目标在不同运动状态下的散射特性。
1 常用坐标系及相互转换
1.1 常用坐标系定义
1)雷达坐标系(n系XnYnZn系)
雷达坐标系一般以测量的雷达为坐标原点,并以正北方向为Xn轴,正西方向为Yn轴,垂直向上为Zn轴。
2)机体坐标系(b系XbYbZb系)
机体坐标系是固连在机体上的坐标系。机体坐标系的坐标原点位于飞行器的重心处,Xb沿机体纵轴指向前,Yb沿机体轴线指向右,Zb轴垂直于OXbYb,并沿飞行器的竖轴指向上,如图1所示。机体坐标系相对于雷达坐标系的方位为目标的姿态角。

图1 雷达坐标系与机体坐标系的位置关系
目标姿态角定义如下:航向角α、俯仰角γ和横滚角β,构成了目标姿态角。α为目标纵轴OXb在XnOYn平面的投影与OXb轴的夹角,γ为目标纵轴OXb与XnOYn平面的夹角,β为XnOYn平面与包含OXb轴的铅垂面之间的夹角。由航向角α、俯仰角γ和横滚角β可完全确定目标在运动过程中姿态的变化[4]。
1.2 坐标转换公式推导
如图1所示,把雷达坐标系转换到机体坐标系:首先,OXn和OYn绕OZn转动α(目标航向角),使OXn与OXb在过原点水平面上的投影相重合;然后,OXn转过α角度后,在铅垂面内再绕转过α角度后的OYn转动γ(目标俯仰角)与OXb相重合;最后,已转过角度α后的OYn绕OXb转动β(目标横滚角)与OYb相重合。

(1)
2 空中目标动态RCS值计算
2.1 动态RCS仿真方法
空中目标机动过程中的RCS值计算步骤主要包括:航路生成、姿态角解算和RCS值计算3个过程,如图2所示。首先获取目标在雷达坐标系中的实时位置、速度和飞行姿态角;然后,通过坐标系变换实现姿态角解算,确定雷达视线在机体坐标系中的时变姿态角;最后,利用得到的姿态角结合目标静态RCS序列计算目标的RCS值。

图2 目标动态RCS仿真流程
2.2 构建目标全空域静态RCS数据库
目标全空域静态RCS数据是雷达目标动态RCS计算的基础,文中利用FEKO软件获取目标全空域静态RCS数据。具体步骤如下:
Step1:以BGM-109战斧巡航导弹和F-16战斗机为对象,根据目标实际尺寸用SolidWorks构建典型空中目标三维模型,如图3所示;

图3 来袭目标三维模型
Step2:将目标三维模型(BGM-109战斧巡航导弹或F-16战斗机)导入FEKO电磁仿真软件,并对模型进一步做网格剖分;
Step3:依据防空武器系统中搜索雷达工作参数,设置雷达的工作频率为3 GHz、入射波的方位角0°~360°、俯仰角-90°~90°、极化方式为水平极化等参数,对来袭目标进行全空域电磁仿真;
Step4:将仿真结果以.txt格式的文件导出并保存;
Step5:构建BGM-109战斧巡航导弹和F-16战斗机的全空域静态RCS数据库,便于后续根据仿真实际进行插值调用。
2.3 雷达姿态角解算
利用FEKO软件获取的目标静态RCS数据库,包含雷达测量的方位角、俯仰角等数据[7]。通常,目标视向角度下的RCS数据才能客观描述运动目标的散射特性,视向角度即机体坐标系下雷达的相对角度,因此在动态RCS计算中通常需要进行坐标系的转换,才能得到机体坐标系视向角对应的RCS值。
雷达姿态角是指雷达入射波在机体坐标下相对于目标的方位和俯仰夹角,包括雷达视线方位角和雷达视线俯仰角[8],如图4所示,雷达方位角φ为飞机视线方向在水平面上的投影与X轴的夹角,φ[0°,360°];雷达俯仰角θ为飞机视线方向与水平面的夹角,θ[0°,180°],距离R为目标到测量雷达的距离。

图4 雷达姿态角示意图
已知雷达坐标系下航迹点的位置坐标(L,B,H)时,首先可按如下转换关系获得它在地心坐标系中的位置坐标(x0,y0,z0):
(2)
式中:RN为卯酉圈半径;f为椭圆偏心率;L为目标经度;B为目标纬度;H为目标高度。
设目标航迹点在雷达坐标系上的位置坐标为(xn(t),yn(t),zn(t)),雷达位置坐标为(x,y,z),雷达坐标系上的位置坐标转换到机体坐标系上的位置坐标为(xb(t),yb(t),zb(t)),则:
(3)

雷达视线角在机体坐标系中的实时方位角φ(t)和俯仰角θ(t)为:
(4)
式中:φ(t)[0°,360°],θ(t)[0°,180°]。
2.4 目标轨迹建模
根据文献[9]目标的基本运动状态包括静止、匀速直线运动、匀加速(减速)、协调转弯、爬升(俯冲),推导出目标的姿态角、速度和瞬时位置的方程,可在雷达坐标系下仿真出目标来袭运动轨迹。
1)瞬时姿态角方程:
(5)

2)雷达坐标系下的速度方程:
(6)
式中:Vx、Vy、Vz为目标机体坐标系下的速度。
3)瞬时位置方程:
(7)
式中:RM=Re(1+e·sin2L),RN=Re(1-2e+3esin2L),e为地球椭圆率,e=1/298.257,Re为地球长半轴,值为6 378 137 m;L0为目标初始经度;B0为目标初始纬度;h0为目标初始高度;Li为目标瞬时经度;Bi为目标瞬时纬度;hi为目标瞬时高度;t为目标运动时间。
2.5 典型目标的航迹仿真
以雷达坐标系为基准,目标的起点(118°,32°,300 m),初始航向角α=90°、初始滚转角β=0°、初始俯仰角γ=0°,仿真步长T=1 s、仿真步数N=3 600,极化方式为水平极化,雷达部署位置(125.5°,31.997°,500 m),根据目标的运动特性,分别对飞机和巡航导弹航迹进行仿真。
2.5.1 飞机航迹仿真
假定有一架F-16战斗机来袭,根据战斗机常用的机动动作,通过对爬升、平飞、俯冲基本运动组合仿真飞机的飞行航迹。图5(a)为目标在雷达坐标系下的飞行轨迹,图5(b)为目标在雷达坐标系下的姿态角信息。
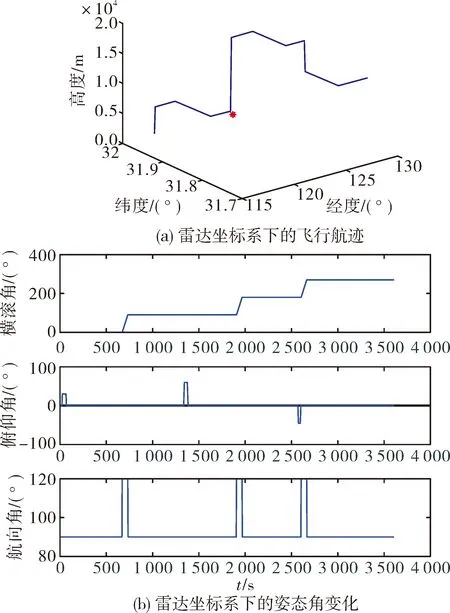
图5 F-16战斗机运动航迹仿真
2.5.2 巡航导弹航迹仿真
假定有一枚BGM-109战斧巡航导弹来袭,根据文献[10]提出的BGM-109作战过程示意图,将导弹飞行过程简化为:爬升、平飞巡航、转弯飞行、跃升、俯冲基本运动,通过对这些简单轨迹组合仿真战斧巡航导弹攻击轨迹。图6(a)为目标在雷达坐标系下的飞行轨迹,图6(b)为目标在雷达坐标系下的姿态角信息。

图6 巡航导弹运动航迹仿真
3 典型空中目标动态RCS仿真分析
首先,根据目标航迹、飞行速度、雷达位置和采样间隔,以及飞行过程中目标的姿态信息,计算得出机体坐标系下的视向姿态角。然后,提取某时刻的视向姿态角,从目标的静态RCS序列中检索出对应的RCS值,即为该时刻目标的动态RCS值。最后,对仿真得到的目标动态RCS进行分析。
3.1 飞机动态RCS仿真
F-16战斗机在频率F=3 GHz、水平极化下的RCS幅度变化如图7所示。
根据图5飞机航迹仿真结果,求解出设定场景下目标飞行过程中的方位角,对图7中的目标0°~360°下RCS进行高精度插值,并寻找出相应方位角的RCS,即目标动态RCS信息。仿真得到的观测时间内目标RCS幅度变化如图8~图9所示。
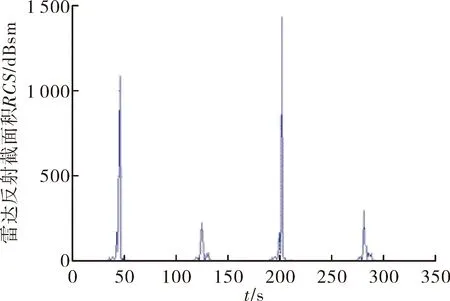
图7 F-16战斗机RCS静态测量数据
综合图8和图9可知,两种飞行轨迹下的RCS变化幅度大,当飞机爬升飞行时,雷达容易发现目标;当飞机接近雷达时,雷达波束逐渐接近迎头照射,RCS值及其变化幅度减小。此外,飞机俯冲飞行时,RCS值变化范围小,说明这种飞行方式有较好的突防效果。但飞机在俯冲前,RCS有明显突增,雷达容易发现目标,因此在防空作战中,防空武器应在飞机俯冲前就开始拦截目标,提高防空武器拦截突防飞机的概率。
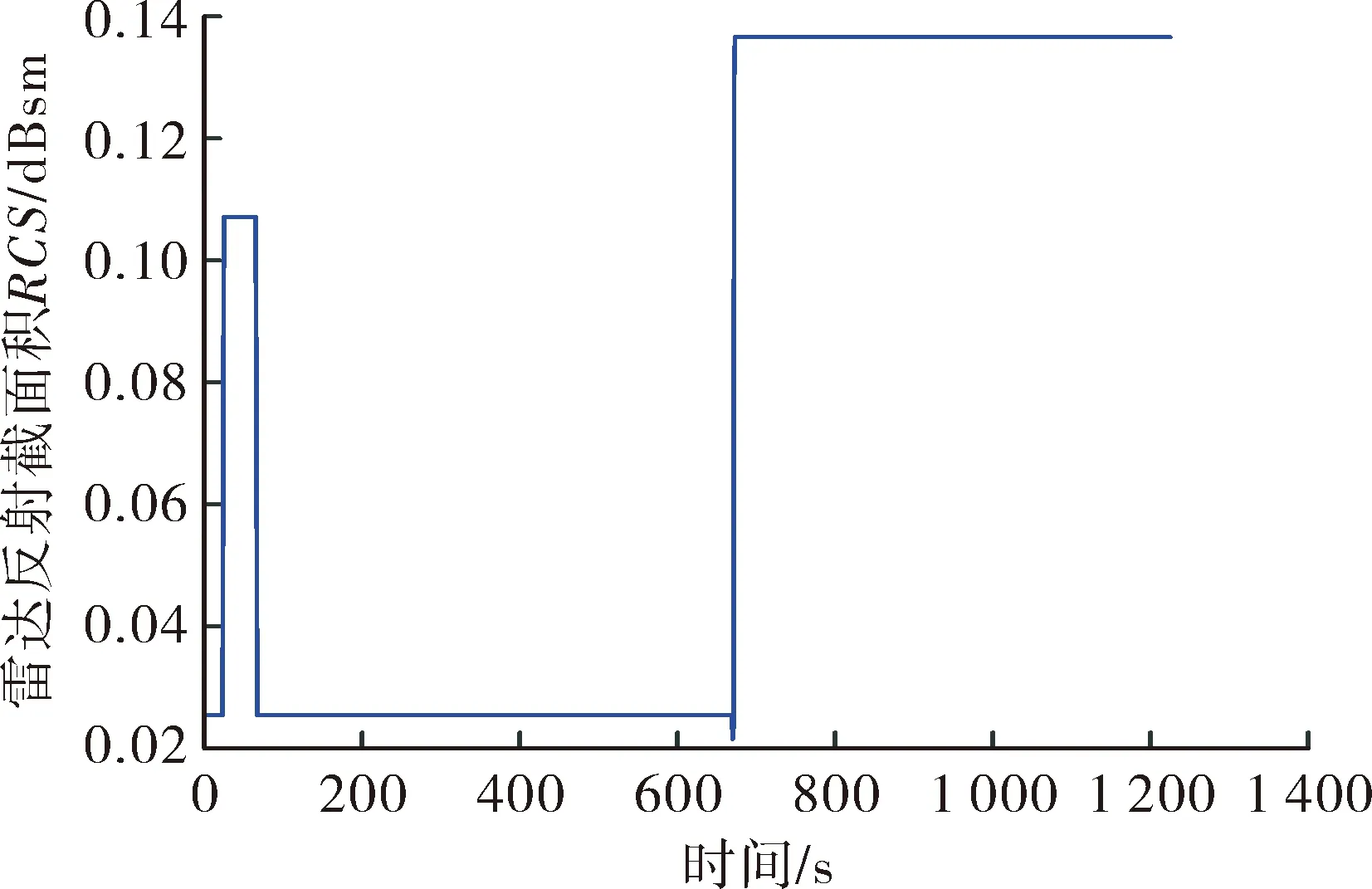
图8 F-16战斗机平飞—爬升—平飞段RCS变化
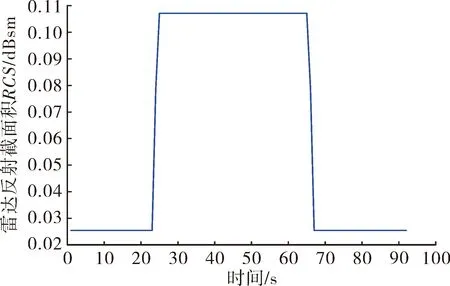
图9 F-16战斗机平飞—俯冲—平飞段RCS变化
3.2 巡航导弹的动态RCS仿真
巡航导弹在频率F=3 GHz、水平极化下的RCS幅度变化如图10所示。
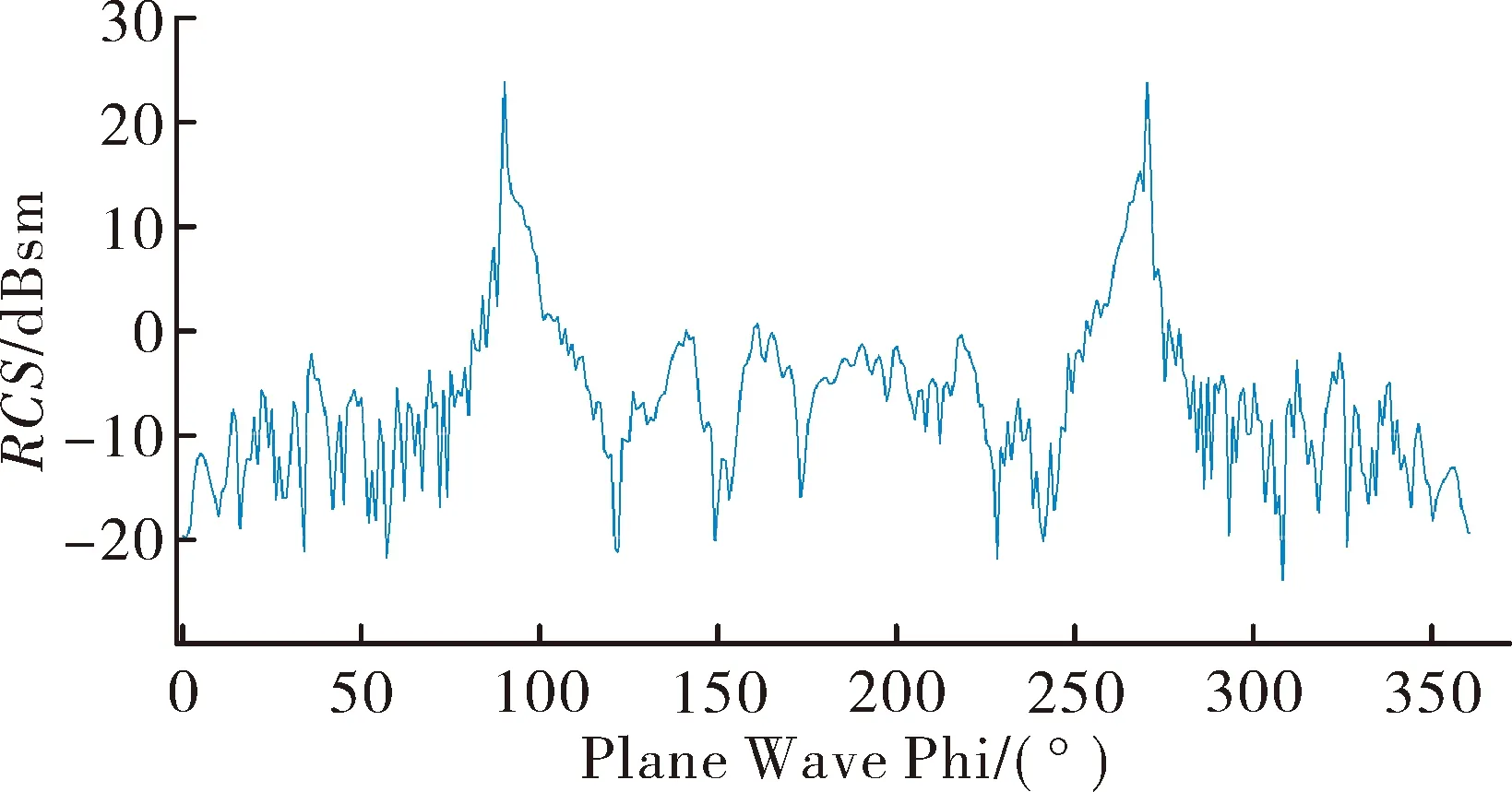
图10 巡航导弹RCS静态测量数据
根据图6巡航导弹轨迹仿真结果,求解出目标末端打击段(跃升—俯冲段)的方位角,对图10中的目标0°~360°下RCS进行高精度插值,并寻找出相应方位角的RCS,即目标动态RCS信息。仿真得到的观测时间内目标RCS幅度变化如图11所示。
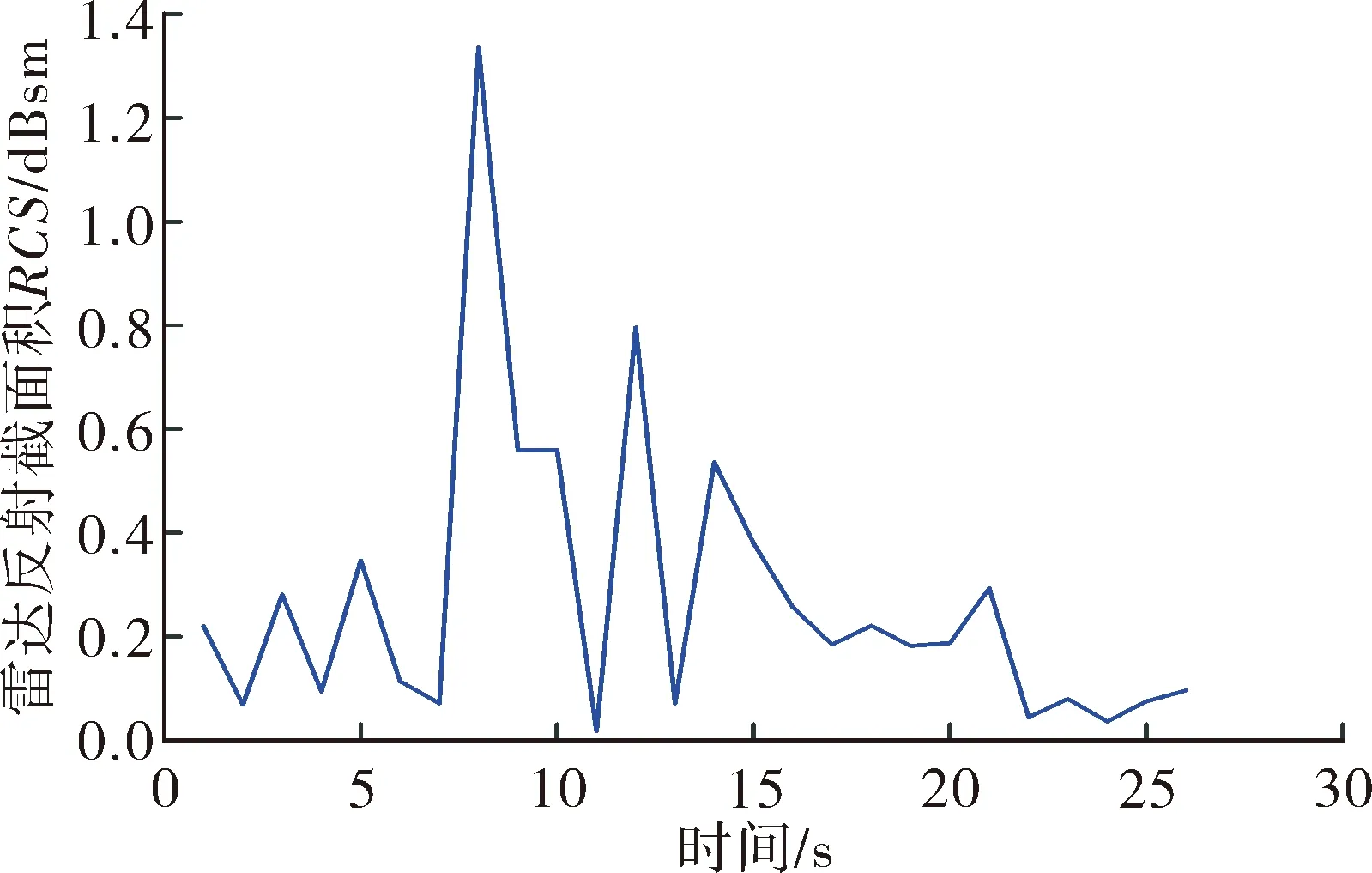
图11 巡航导弹俯冲打击段RCS变化
由图11可知,在巡航导弹的俯冲打击段内,导弹的RCS变化幅度大,出现了多个波峰和波谷,并且导弹在5~10 s采样时间内,RCS跃升到最大值,这是由于巡航导弹跃升飞行导致视向俯仰角变化所决定的。因此,对于巡航导弹的末端防御,搜索雷达在巡航导弹跃升段容易发现目标,防空武器就应开始采取相应的拦截措施,提前部署火力单元。
4 结论
随着战斗机、巡航导弹等空袭武器的隐身性能不断提高,对担负着保护重要目标、区域安全的防空武器系统的防御能力提出了更高的要求。从文中仿真分析可知,对于高速运动的目标,飞行轨迹影响机体坐标系中视向角的变化规律,根据复杂目标的散射起伏,视向角的变化会引起RCS的剧烈起伏。通过航迹仿真结果和目标静态RCS数据相结合,搜索雷达能提前快速准确的掌握运动目标散射特性的变化,为后续作战行动留出充足的时间。
猜你喜欢
航空学报(2022年9期)2022-10-14
环球时报(2022-08-18)2022-08-18
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年9期)2021-11-27
云南画报(2021年8期)2021-11-13
北京航空航天大学学报(2021年6期)2021-07-20
成都体育学院学报(2021年1期)2021-07-16
阅读(低年级)(2019年4期)2019-05-20
