
植保无人机的应用特点与变量施药技术研究
2020-08-31 14:55王升海
农机使用与维修 2020年8期
王升海

摘 要:多旋翼植保无人机是我国农业无人机植保的新方式,近年来不仅发展速度快,而且体现出了显著的作业优势,通过对现阶段农用植保无人机作业特点进行分析,说明了多旋翼植保无人机作业时的优势与不足,并对植保无人机应用变量施药技术的实施方式进行了研究与总结,说明了在植保无人机上应用变量施药技术的必要性。
关键词:植保无人机;应用特点;变量施药技术;研究
中图分类号:S251 文献标识码:A
doi:10.14031/j.cnki.njwx.2020.08.014
植保工作是农业稳产高产的基础性工作,也是农业生产的重要工作项目,随着农业生产的集约化经营增多,农业生产的规模不断扩大,对农业植保作业的能力提出了更高的要求。传统的农业生产植保工作多通过人力喷雾或背负式的半自动喷药机进行喷雾植保,而这种喷雾植保的作业形式并不适用于大面积农田的作业使用,采用人工对大面积农田进行植保作业不仅效率低下,还容易发生中毒等人身安全事故。近年来我国的植保机具水平得到了大幅度提升,轮式植保机具应用逐渐增多,与此同时,多旋翼无人机植保作业也以新的形式出现在农业生产之中,使农业植保作业变的更为智能与灵活,且作业效率和质量都得到了显著提升。
1 植保无人机应用特点和不足
1.1 应用优势
多旋翼植保无人机采用专业飞手远程操控的方式进行作业,与传统的轮式植保机械作业相比,具有独特的技术优势。
(1)作业灵活性好。首先植保无人机的体积小巧,在田间运输转移十分方便,且作业时因采用飞行的方式植保,因此可以不受山地、丘陵、水田等不利地形的影响,对不同情况的地势通过不同的作业方案和自适应能力能够实现良好的作业效果。
(2)植保作业效率高。在使用植保无人机作业时,由于其自动化程度高,只需通过前期对农田的定位和勘测,即可形成合理的自动化作业方案,无人机会结合GPS技术和传感器技术自动按照预定路线进行喷施,作业过程不需要人工干预。当无人机缺少农药或电量不足时,其能够实现自动返航,在补充农药或更换电池后,可自动回到之前工作位置继续作业,满足断点续喷的作业要求,不易出现漏喷或重喷的作业质量问题。据统计,优质的无人机植保作业效率可达到人工作业的60倍以上。
(3)施药能力显著增强。植保无人机采用多旋翼的结构形式,现阶段使用的无人机以4旋翼、6旋翼、8旋翼機型居多,植保无人机的主要结构如图所示。在进行植保作业的过程中,螺旋桨产生的下旋气流能与下方的喷雾杆进行配合,将喷出的细化雾滴向植株的下方带动,使喷雾具备更强的穿透力,农药雾滴能够对叶背及根部实现覆盖,从而有效减少农药的漂移量,增强植保作业的防治效果。
(4)节能环保效果好。采用植保无人机作业利用高雾化喷头和高植保能力,能显著降低农药和水的使用量,减少作业过程对农作物产生药害和对环境产生污染的可能性;同时,植保无人机作业相对于传统轮式机具作业更节能,且不会对植株产生碾压等破坏问题,有利于保护农作物正常的生长状态。
(5)有利于保护作业人员的人身安全。由于采用远程遥控的方式进行作业,在实际的植保范围内并没有工作人员参与,这种远离工作区的遥控作业方式,能有效避免植保人员受到农药中毒等危害,同时,自动化作业的形式也能减少辅助人员的参与数量。
1.2 应用中的不足
尽管近年来我国的植保无人机技术取得了较快的发展,但是前期的技术开发多以参考国外的成熟机型为主,自主核心技术仍处于缺乏的状态,导致无人机植保在实际应用过程中仍存在较多的问题。
(1)缺乏规范的农艺技术标准与植保技术相配套。由于在植保作业过程中没有规范的标准约束,在实际作业中常存在着农药喷洒超量、农药喷洒不均匀、作业中药雾飘移散失等问题,同时由于没有对操作的规范性要求,飞手在实际操作时缺乏统一的作业流程、速度控制、飞防技术等标准化的参考,不利于形成规范统一的科学作业效果。
(2)专用药剂的研发相对滞后。植保无人机作业时所使用的药剂与传统的轮式植保机械存在较大差别,植保无人机所携带的农药通常要求密度高、易于雾化、附着性好、耐于水、耐蒸发等特点,而现阶段农药生产企业并没有重点针对无人机植保进行产品开发,致使无人机在植保作业中仍采用普通高浓度农药进行作业,在一定程度上影响了植保能力的发挥。
(3)没有形成系统的操作人员培训体系。现阶段对植保无人机的使用只能依靠专业的无人机飞手进行操作,导致农民个人购买无人机后操作技能不足,很难实现自主作业,既使经过生产厂家的技术培训,以我国农民的学习能力仍很难达到专业飞手的技术要求,导致个人使用植保无人机作业的效果不佳。
2 植保无人机变量施药技术的实施
随着精确喷药理念在农业植保工作中应用与普及,很多先进的植保技术被应用于农业生产中,例如变量喷药技术、静电喷雾技术、对靶喷雾技术等。植保无人机作为先进的智能植保机具,将其与变量喷药技术进行有机融合,能有效提高其植保能力,减少植保过程中产生的资源浪费与环境污染。
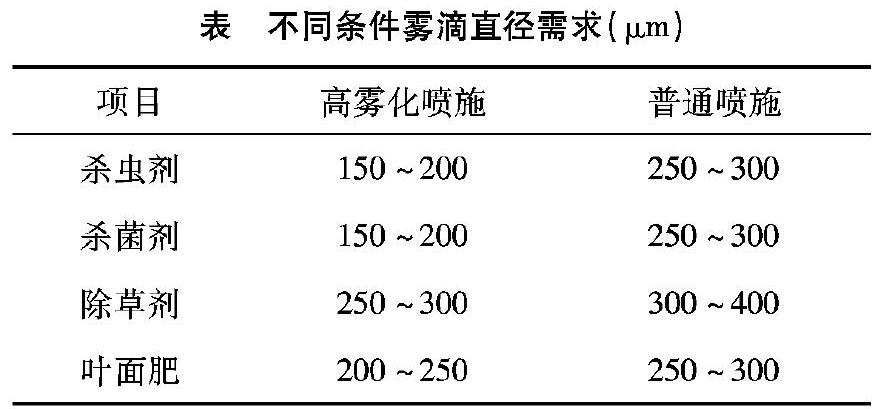
2.1 变量喷药的雾化要求
农业生产植保作业过程是十分复杂的,针对农作物不同生长期的病虫害预防,以及对已经发生的不同病虫害进行治疗,所采用的喷雾技术均存在较大差异。通常情况下,按照最合理的喷药作业技术需求,对雾化喷头所喷出的雾滴的适用情况进行总结,具体应用情况及雾滴细化直径如下表所示。
2.2 变量喷药技术的实施方法
变量喷药技术是一项智能化的自动调节的喷药技术,它能够根据无人机的飞行速度、杂草病虫害严重程度、自然条件的变化等因素自动调整药业喷出的压力、雾化程度和流量,其主要的变量控制方法包括以下三大类:
(1)传统的压力变化控制法。根据无人机上所配备的多种传感器对环境进行感知后,能够自动形成植保方案,能够自动匹配作业速度和环境变化等因素。利用无人机喷药系统中的减压阀调整喷头位置的压力与流量,以满足改变喷药量的功能需求。
(2)滞环控制法。通过在作业时设计合理的变量范围,通常的变量范围设置在0.9~1.1之间,当喷药量小于0.9时,系统自动调整压力使喷药量增加,当喷药量超过1.1时,系统自动调整减小喷药量,以此避免产生喷药量不足或喷药过度产生药害等问题。
(3)智能控制法。这种方法结合了数学计算与经验分析能够将实时的喷药压力与环境因素等变量进行对比,还可以结合GPS系统和GIS系统对电液比例阀进行控制,不仅能够保证喷药过程中的稳定性,还能针对病害的严重与否智能调整药量,以满足植保作业的最佳化要求。
3 结语
植保无人机在农业上的应用已经展现出明显的技术优势,也受到了广大农业经营者的认可与使用,但无人机技术要想得到近一步的优化与提升,还必须接受农业生产更长久的实践与机械性能结构的不断优化。这要求植保无人机具备更强的普及性和使用率,这需要农业主管部门对无人机行业给与更好的政策支持,通过购置补贴和农机推广等方式,促进农用植保无人机的广泛使用,以便于在实践中优化技术能力,使我国的农业植保的机械化作业更加高效与智能。
参考文献:
[1] 蒙艳华, 周国强, 吴春波,等. 我国农用植保无人机的应用与推广探讨[J]. 中国植保导刊, 2014,34(S1):33-39.
[2] 刘泽锋, 唐宇, 骆少明,等. 多旋翼植保无人机变量喷洒系统设计[J]. 农机化研究, 2018, 40(12):47-54.
[3] 司军锋, 张玥, 周鹏,等. 植保机械变量喷药控制系统研究进展[J]. 农业机械, 2015(5):89-93.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
辽金历史与考古(2021年0期)2021-07-29
科技传播(2019年22期)2020-01-14
民用飞机设计与研究(2019年4期)2019-05-21
现代农业科技(2017年6期)2017-05-12
吉林农业·下半月(2017年3期)2017-04-14
农业工程技术·综合版(2017年1期)2017-04-05
中国新技术新产品(2016年22期)2016-11-29
考试周刊(2016年83期)2016-10-31
科教导刊·电子版(2016年21期)2016-08-23
