
无刷直流电机控制技术在淡水养殖割草船中的应用
2020-08-28 11:20王琢张俊峰高星星肖进罗友谊田满洲彭桂元
湖北农业科学 2020年12期
关键词:无刷直流电机
王琢 张俊峰 高星星 肖进 罗友谊 田满洲 彭桂元

摘要:在农业淡水养殖中,适量的水草有利于鱼类的呼吸作用,并能够净化水质,但过量的水草会影响鱼类的成活和生长。机械割草是目前应用最广泛的除草方式,割草船推进系统是机械割草重要的一个环节,无刷直流电机是一种典型的机电一体化设备。利用嵌入式技术、电力电子技术、模拟电子技术、数字电子技术,设计了基于无刷直流电机的割草船控制系统,通过硬件设计和软件设计,实现了航向控制、航速控制、割草控制。通过样机测试,控制系统具有较高的实用性、稳定性,对比传统的有刷直流电机,采用无刷直流电机的机械割草船拥有更长的使用寿命。
关键词:机械割草;淡水养殖;无刷直流电机;航行控制
中图分类号:S969.38
文献标识码:A
文章编号:0439-8114( 2020) 12-0159-05
D01:10.1408 8/.j .cnki.issn043 9- 8114.2020.12.035
开放科学(资源服务)标识码(OSID):
水草是池塘生态系统中不可缺少的一部分,在光照下能持续地产生氧气,并将氧溶解于水中,有利于鱼、虾、蟹的呼吸作用。然而,由于水体富营养化,氮含量上升,导致很多池塘出现了水草疯长的现象。过多的水草吸收水中营养物质,降低水体肥度,减少鱼类的活动空间,严重影响鱼苗的成活和生长,如果不及时处理,会对整个池塘的生态平衡造成破坏[1-3]。常见的除草方法有除草剂除草、生物除草、人工割草以及机械割草等。除草剂分为化学除草剂和生物除草剂,化学除草剂存在危害环境、有毒性残留的问题,已逐渐被生物除草剂替代。生物除草剂是指利用自然界中的生物(包括微生物、植物和动物)或其组织、代谢物生产的用于除草的生物制剂,可以有效减少化学除草剂残留,消除二次污染,改善农业生态,有利于实现环境安全和农业可持续发展[4-6]。生物除草是针对需要除去的草类来放养生物,在池塘中喂养食草性的鱼类来去除多余的水草。人工割草是指人直接进入池塘,拔掉多余的水草,费时、费力且效率低下。机械割草是利用可以在水面航行的机组进行割草作业,劳动强度低、作业效率高。目前,割草船在淡水鱼养殖、虾蟹养殖中得到了广泛的应用,许多电力推进的割草船采用普通的有刷直流电机。有刷直流电机中电刷和换向器的滑动接触造成了机械磨损和火花,存在故障多、可靠性低、寿命短、保养维护工作量大等缺点。本研究将无刷直流电机及其控制技术应用到农业淡水养殖割草船上,开发了一套硬件和软件系统。
1 无刷直流电机控制技术
无刷直流电机克服了有刷直流電机的缺陷,以电子换向器取代了机械换向器,无刷直流电机既具有直流电机良好的调速性能,又具有交流电机结构简单、无换向火花、运行可靠和易于维护等优点。无刷直流电机的实质是直流电源输入,采用电子逆变器将直流电转换为交流电,有转子位置反馈的三相交流永磁同步电机。无刷直流电机主要由用永磁材料制造的转子、带有线圈绕组的定子和位置传感器组成。无刷直流电机的定子是线圈绕组电枢,转子是永磁体。控制器实时检测电机转子的位置,再根据转子的位置给电机的不同相通以对应的电流,使定子产生方向均匀变化的旋转磁场,电机就跟着磁场转动起来。目前,无刷电机控制技术广泛地应用在计算机外设、电子数码、工业控制、医疗设备、汽车、家用电器等领域[7-9]。
2 淡水养殖割草船
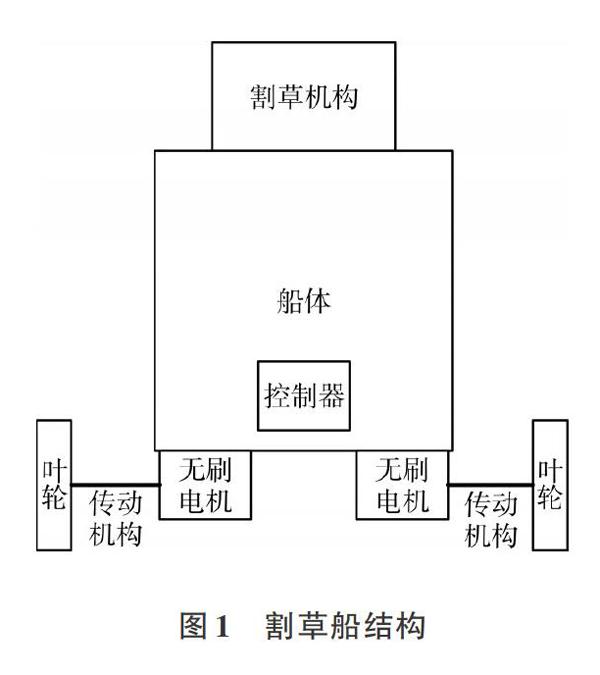
淡水养殖割草船由船体、割草机构、无刷直流电机、传动机构、叶轮、控制器组成(图1)。该淡水养殖割草船采用了双侧推进叶轮,取代了传统的单推进器和舵机的模式,使得割草船拥有更大的动力输出。当两侧叶轮同方向旋转时,可以推进割草船前后运动;当某一侧叶轮旋转时,可以使割草船转弯。因此,只要实现无刷直流电机的旋转方向和转速控制,就能够实现割草船的航行状态控制。割草船航向与两侧电机的运行状态如表1所示。
3 硬件系统设计
3.1 硬件总体设计
淡水养殖割草船控制系统由单片机微控制单元、航向控制单元、航速控制单元、割草控制单元、前级驱动单元、电子换向器单元、霍尔信号检测单元、过流检测单元、欠压检测单元、无刷直流电机、割草机构、电量报警单元组成(图2)。
3.2霍尔信号检测单元
霍尔信号检测电路见图3,其作用是对电机内部霍尔传感器输出的电平进行低通滤波,将平稳的信号波形送人单片机外部中断。电机的额定转速为280 r/min,空载转速为3 100 r/min,因此,霍尔传感器信号的最大输出频率为310 Hz。R24和C11构成一阶RC低通滤波器,截止频率设计为4.8 kHz。
3.3 电子换向单元
电子换向单元是无刷直流电机控制系统的核心单元,控制系统根据霍尔信号检测单元得到的电机转子所在位置,然后依照定子绕线决定电子换向器中功率晶体管的开启顺序,使电流依序流经电机线圈,产生顺向或逆向的旋转磁场,并与转子的磁铁相互作用,使电机转动[10.11]。当电机转子转动到霍尔信号检测单元得到另一组位置信号时,控制系统再开启下一组功率晶体管,循环电机按同一方向继续转动。若关闭功率晶体管,则电机停止转动;若按照相反顺序开启功率晶体管,则电机反方向转动。
电子换向器是由12个N沟道场效应功率晶体管CS48N88组成的全桥型控制电路,电路分为A、B、C三相,每相由上臂和下臂功率晶体管组成(图4)。Ql、Q2为A相上臂功率晶体管,Q7、Q8为A相下臂功率晶体管,Q5、Q6为B相上臂功率晶体管,QIl、Q12为B相下臂功率晶体管,Q9、QlO为C相上臂功率晶体管,Q3、Q4为C相下臂功率晶体管,同相同臂的两只功率晶体管同时开启,以增大额定电流。同一组上臂功率晶体管和下臂功率晶体管不能同时开启,否则会造成电源短路,电路损坏。系统根据霍尔信号检测电路输出的电平,得到电机内转子的位置,再根据电机需要的转动方向,控制功率晶体管的状态,从而使电机带动叶轮转动,推进割草船行驶,并通过调整PWM占空比实现转速的调节[12]。功率晶体管开启的顺序如表2所示。
3.4 前级驱动单元
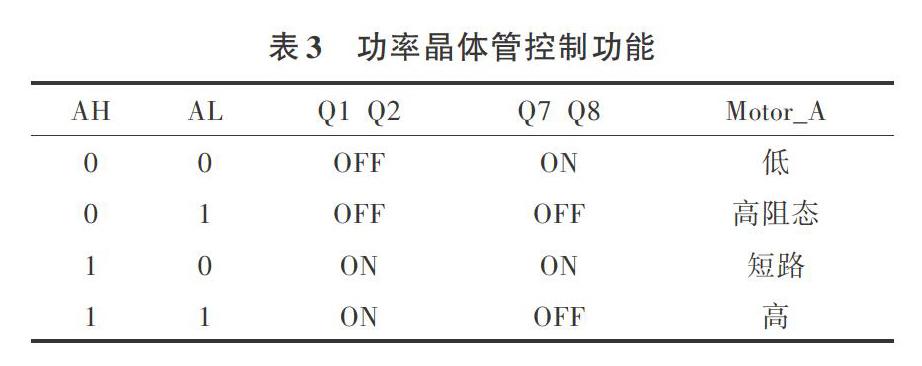
前级驱动单元包括3个相同的三态输出电路,分别驱动3相的功率晶体管,图5为A相功率晶体管的前级驱动电路。AH和AL接单片机的GPIO,分别用于控制A相上臂和下臂功率晶体管的导通或截止。当AH为高电平时,Q17、Q15、D2导通,从而Q1和Q2导通;当AH为低电平时,Q17、Q15截止,Q16导通,从而Q1和Q2截止。当AL为低电平时,Q21、Q20導通,从而Q7、Q8导通;当AL为高电平时,Q21、Q20截止,Q22导通,从而Q7、Q8截止。CS48N88为N沟道MOS管,其栅极电压高于源级电压10 V以上的情况下,才能完全导通。C2为自举电容,通过D1接到+15 V DC电源,当所有MOS管关闭的情况下,C2通过D1和R8充电到13V。当Q1、Q2导通,其源级电压为48 V DC,此时C2充满电,电压仍为13 V,可以维持Q15导通并使Q1、Q2的栅极电压在61 V DC,Q1、Q2完全导通。RT为康铜丝电阻,作用是采样实时工作电流,当电流超过17 A时,强制对电机限速。功率晶体管状态控制逻辑如表3所示。
4 软件系统设计
软件系统主要包括航行控制程序和割草控制程序,本研究主要针对航行控制。系统上电后,循环检测操作者发出的航行方向和航行速度信号,控制系统根据该指令实时调整两侧电机的转动方向和速度,从而使得割草船按照操作者意图航行。当航行方向改变时,电机转动方向可能会出现改变,也可能不变。当割草船由前行向后退切换时,两侧电机的转动方向同时反向,这时系统会控制电机先减速到停机状态,再反向加速到设定速度;而当割草船由前行向左转切换时,右侧电机始终保持反转,这时控制系统不会对右侧电机进行调整。
4.1 航行控制程序设计
以割草船前进时左侧电机为例,控制流程如图6所示。在任何情况下,电机的运行状态只可能为停机、正转、反转,而割草船前进时,左侧电机必须正转。当电机为停机状态时,则电机加速正转至设定速度,直接进入加速正转的子程序;当电状态为正转时,则调速至设定航速;当电机为反转状态时,电机先减速到电机停机状态,然后进入加速正转的子程序。
4.2航向控制子程序设计
在硬件上,将霍尔信号检测单元输出接到单片机的外部中断引脚上,当转子位置更新时,程序进入中断服务子程序,为了防止外界干扰和传感器自身故障,会对信号进行两次鉴别。第一次鉴别采用连续读取5次霍尔传感器输出电平,如果5次信号电平一致就认为是有效信号。第二次鉴别是将本次电平和上次电平比较,若两次信号变化确定是连续的两拍,则认为本次信号是有效信号。在接收到有效信号后,根据主程序置位的转动方向标志,来控制相应的功率晶体管导通、截止或输出PWM信号,从而使两侧电机动作。航向控制流程如图7所示。
4.3 航速控制子程序设计
在硬件上,采用旋钮式电位器来进行调速,再用单片机的ADC来检测电位器给定电压,电压范围为0-10 V,对应输出PWM占空比0%~100%。程序在定时器中断时对PWM占空比进行调节,程序间隔50 ms进入一次中断服务子程序。调速必须在满足电流在17 A以下时进行,当电流大于17 A时,强制将PWM占空比减小。当电流小于17 A时,根据主程序置位的速度控制标志来改变占空比,从而使电机加速、减速到设定值或O。航速控制与程序流程如图8所示。
5 小结
本研究将无刷直流电机及其控制技术应用到了淡水养殖割草船上,研究了双侧电机组成了航行推进系统的控制逻辑,通过硬件电路设计和软件程序编写,实现了割草船的航向控制、航速控制、割草控制。相比传统有刷直流电机构成的推进系统,该系统动力输出更大,割草效率更高,输出功率达到350W,输出电流达到28 A。
参考文献:
[1]周威,周文全,张金彪,等.不同水草种植模式对河蟹生长及池塘环境的影响[J].水产养殖,2019(6):20-22.
[2]刘保试析水草密度对河蟹池塘水质和养殖效益的影响[J].农家参谋,2019(8):142.
[3]王清华,芮红兵,赵小平,小龙虾池塘生态养殖技术[J].水产养殖.2019(8):22-23.
[4]陈世国,强胜,生物除草剂研究与开发的现状及未来的发展趋势[J].中国生物防治学报,2015,31(5):770-779.
[5] POWLES S B,YU Q.Evolution in action:plants resistant to her-bicide[Jl. Annual review of plant biology, 2010, 61: 317-347.
[6] CREEN J M.Current state of herbicides in herbicide-resistant crops[J]. Pesticide management science, 2014, 70(9):1351-1357.
[7]h德明.电动汽车用永磁无刷直流电机换相转矩脉动控制研究[D].哈尔滨:哈尔滨工业大学,2013.
[8]韦日益.医用手术动力无刷直流电机无传感器控制系统设计的初步研究[D].重庆:重庆大学,2015.
[9]边淳.基于直流无刷电机控制的T业缝纫机系统的研制[D].广州:华南理工大学,2012.
[10]王晓蕾,徐彦,王振兴,等.一种用于无刷直流电机控制器的低成本专用电路[J].电子技术应用,2019(8):124-127.
[11]童宏伟,张莉萍,申景双,基于STM32的无刷直流电机控制系统[J].传感器与微系统,2019(7):79-81.
[12]荣军,李一鸣,万军华,等.不同PWM调制方式对无刷直流电机调速的影响[J].微电机,2015,48( 10):70-74.
作者简介:王琢(1988-),男,湖北武汉人,T程师,硕士,主要从事农业信息化与智能控制研究,(电话)18627932448(电子信箱)wang_zuo@163.com;通信作者,张俊峰(1984-),男,湖北天门人,高级工程师,博士,主要从事农业智能装备研究,(电话)15972934959(电子信箱)zjf@whiam.cn。
猜你喜欢
计算技术与自动化(2016年2期)2016-07-20
科技传播(2016年10期)2016-07-15
现代电子技术(2014年8期)2014-09-27
湖南大学学报·自然科学版(2014年5期)2014-08-08
