
电力巡检机器人自动避障与轨迹规划系统研究
2020-08-28 05:41高山峻许文斌杨雪婷
自动化与仪表 2020年8期
杨 海,高山峻,许文斌,杨雪婷
(西南石油大学 机电工程学院,成都610500)
随着当前国家电力需求越来越高,电力系统得到快速的发展,相应的电力系统也越来越多,且电能的输送和分配任务变得更加繁重,传统的人工巡检的压力和危险程度也变得越来越大。 因此,对电力系统定期巡检变成了维护电力系统安全的关键[1]。传统的人工巡检对工作人员存在一定风险和弊端[2],例如,随着巡检次数增加、测量准确度要求提高和随着电压升高对工作人员的危险变大,且一些狭小的空间,工作人员不方便进行检查,导致对电力系统一部分的疏忽,这些问题都对传统的人工巡检方式提出了巨大的挑战。 随着机器人技术的发展,将机器人技术带入到电力系统巡检中代替人工巡检,不仅会带来更好的经济效益,还会大大减少电力系统中高压高辐射对工作人员的伤害,还会将机器人技术运用于实际,更好地促进机器人技术的发展[3]。
本文从提升巡检机器人运动稳定性和功能性出发,自主研发适合电力系统狭小空间的一套针对电力系统场站巡检能够进行自由移动的巡检机器人平台,利用红外传感器[4-6]和超声波传感器[7]能够实现障碍物实时检测, 自动根据障碍物的形状避障,具有定位导航功能,利用人工势场法能够实现动态的轨迹规划,达到移动到指定目的地的目的。
1 电力巡检机器人整体设计
1.1 电力巡检机器人机械设计
本系统所使用移动机器人平台的底盘自主研发,在solidworks 软件中进行设计。 机器人主体采用八边形玻璃板,玻璃板轻便且在电力系统中相对稳定, 设计了由1 块5 V 驱动板和Mega2560 电路板对4 个独立驱动主动轮进行控制。 底板规则多边形设计和4 个交叉布置的轮子在轮子的运动方向上呈现三角形布局,让机器人在巡检过程中拥有更加稳定的条件,三维模型如图1 所示,装置图如图2所示。

图1 巡检机器人三维模型Fig.1 Three dimensional model of inspection robot

图2 巡检机器人装置图Fig.2 Inspection robot
每个轮子采用的是全方位轮而且在外缘按照一定角度增加了一组辊子可以保证运动的平滑性,并且能够实现不需要平台转换方向的二维移动加一维移动,其正视图和左视图如图3 所示。

图3 巡检机器人全方位轮Fig.3 Omnidirectional wheel of inspection robot
1.2 电力巡检机器人坐标系模型
本文所设计的巡检机器人在行进平面上选择一点O,把该点O 作为全局坐标系的原点,选取2条相互垂直线作为全局坐标系X 轴和Y 轴,把巡检机器人的质心坐标定为原点o,把机器人运动模型左侧定位局部y 轴,前面定位为x 轴,如图4 所示。
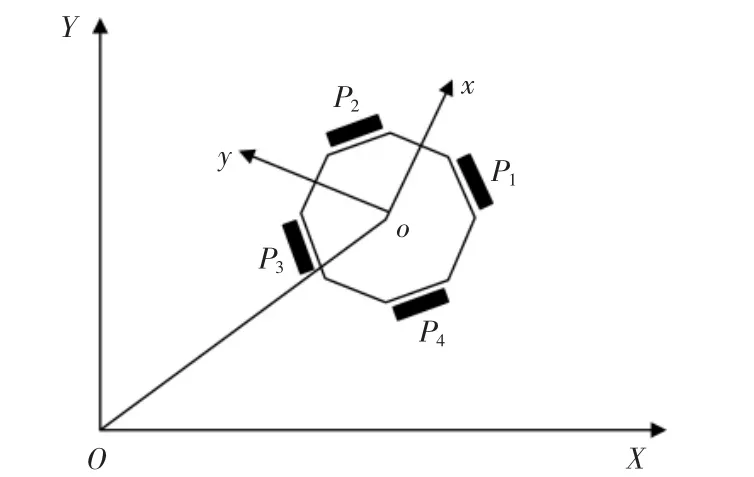
图4 巡检机器人坐标图Fig.4 Inspection robot coordinates
该机器人运行以电机转向为基础进行运动,采用四轮同转速的方案,并且假设在机器人运动方向上取逆时针,如图5 所示描述的是巡检机器人在二维坐标中的位置。
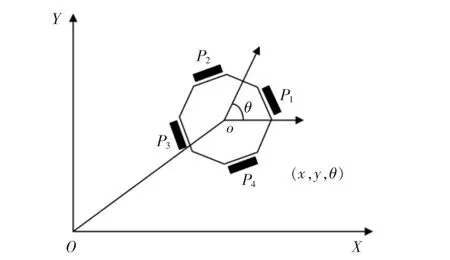
图5 巡检机器人的位置图Fig.5 Location of inspection robot
L 为轮子到巡检机器人质心的距离, 机器人质心到四个轮的向量分别为Pn,即:

设F 为机器人坐标系到各个轮中心方向上驱动正方向的单位矢量:

R(β)为二维旋转矩阵,即:

PB表示机器人在坐标系中的位置:

设各个轮子中心点在机器人坐标系中的向量可表示为Qn,即:

设各个轮子的速度矢量为Vn, 可得到Vn=Qn′,由此可凭借运动关系得到:

设轮子半径为r,所以Vn=rωn,得巡检机器人的运动学模型:

2 基于多传感器障碍检测自动运行设计
2.1 局部避障处理
在电力系统条件下实际路况比较单一,机器人可选择的路线比较有限,遇到障碍物的情况也是有限的,基于此背景,本文会根据实际环境情况做划分,进而确定避障策略。
当巡检机器人在按照正常规划好的路径巡检时,会有近红外传感器和超声波传感器来对前左右3 个方向进行判断[8]。利用近红外传感器和超声波传感器测距的原理进行障碍物检测时,通过设计一个安全距离使传感器有足够的时间发出并接收信号来判断障碍物的位置,从而进行避障。 为了避障的准确性,本文将障碍物标准化为矩形,通过传感器直接获取周围障碍物的距离信息,来保证避障的安全性,机器人与障碍物的相对位置如图6 所示。
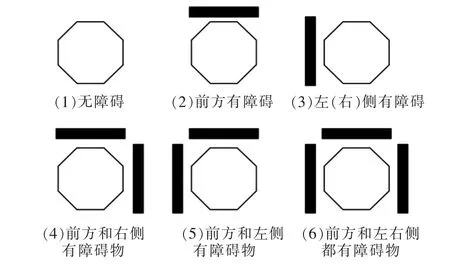
图6 各个情况下的障碍物位置Fig.6 Location of obstacles in each case
以上是对所能碰到的障碍物的情况做一个分布归纳,全部情况包含在其中,所以采用以上标准化后的空间障碍分布模型算法可以达到安全躲避障碍的效果。
2.2 基于人工势场法和计数算法的动态路径规划
在本文中计数算法和避障功能配合实现,即在避开障碍物的过程中的运行时间是以计数算法来设置的,同时配合调整过的人工势场法[8-9]在未知环境下向定位点运动,主要包括以下3 个步骤:推出斥力势函数、推出引力势函数、计算合力。
2.2.1 斥力势函数
监测到障碍物时巡检机器人需要避障,因此在势场中障碍对机器人产生斥力,且距离越小斥力越大。 因此,势能和距离成反比,我们可以假设斥力势函数为
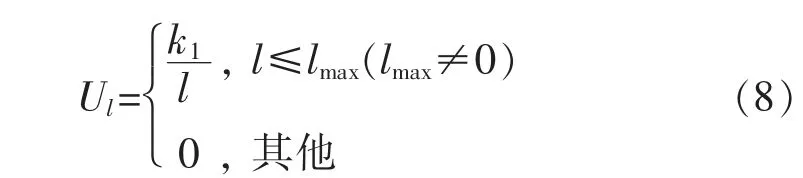
式中:l 为巡检机器人与障碍物之间的距离;lmax为势场作用的最大范围;k1为系数。 所以巡检机器人机器人所受到的斥力为

当l 趋于0 时,趋向于无穷大。为了避免在监测过程中机器人与障碍物发生碰撞,因此设置一个最小的安全距离L,l 当趋近于L 时,Fl足够大即可。
2.2.2 引力势函数
巡检机器人的动态轨迹是随着定位目标点规划的,所以目标点始终会对巡检机器人产生一种引力,并且这种引力与巡检机器人与目标点之间的距离大小成正比,二者相距越远引力势能就越大[10]。当机器人到达目标点时,引力也就随之消失。 根据这个相关关系,可以假设机器人的引力势函数为

式中:k2为系数;h 为机器人与目标点之间的距离,最后得出机器人所受的引力如下:

2.2.3 合力的计算
将引力与斥力同时在x、y 两个方向上分解,并计算出同方向上合力,再进行合力计算:

式中:Fx为引力和斥力在x 轴分量的合力;Fy是引力和斥力在y 轴分量的合力。
秦明月刚走出卢局长办公室,手机就响了,还是边峰打来的,他想想还是接了。边峰说:“秦队,你别不够意思啊,我们一起喝喝茶如何?”
2.3 动态路径规划中的定位导航
为了使巡检机器人更准确地确定目的地,因此增加了一个定位模块来对目的地进行定位,使机器人实现在未知环境下的定位导航功能。 在巡检机器人的定位模块中设定好目的地的位置,巡检机器人就会开始向着定位好的点进行动态路径规划,可以有效避免巡检机器人巡检过程中因为绕路而耗费时间的情况。
3 实验开发与验证
3.1 实验软硬件开发
巡检机器人的控制系统主要包含Mega2560 电路板的选择,和相关代码控制软件Arduino 等,该电路板具有54 路数字输入输出, 具有大量IO 接口。该控制系统通过电脑设计代码用USB 连接电脑进行代码的上传,来控制机器人所具备的功能。
驱动车轮行走的电机采用的是42 步进电机,该电机噪音低、力矩大、运行平稳、精确度高等特点。 本文所用电机,电机机身长40 mm,轴径5 mm,电机扭力0.4 N·m,电流1 A,最高转速1200 r/min,额定转速600 r/min。
电机采用的是二相混合式步进驱动器HB420,该驱动器内部采用类似伺服控制原理电路,此电路可以使电机低速运行平稳, 几乎没有震动和噪声,拥有较多的IO 接口,便于外部信号的接收与反馈。
3.2 实验验证
实验设置的巡检机器人在实际场景下的轨迹图,如图7 所示。

图7 实际路线图Fig.7 Actual road map

图8 避开障碍物的数量Fig.8 Number of obstacles to avoid
可见碰撞到每个障碍物的几率为2.9%,避障效果较好,体现多传感器融合的避障算法有效性。
在实际标准路径中设置起点到目的点距离为3.510 m 为标准,但在实验过程中也出现了实际轨迹与标准轨迹出现了偏差的情况,因为到达目标点可能会受到附近障碍物的的影响,巡检机器人受到排斥力可能会偏移轨迹[11],因此重复实验15 次,运动轨迹情况如表1 所示。
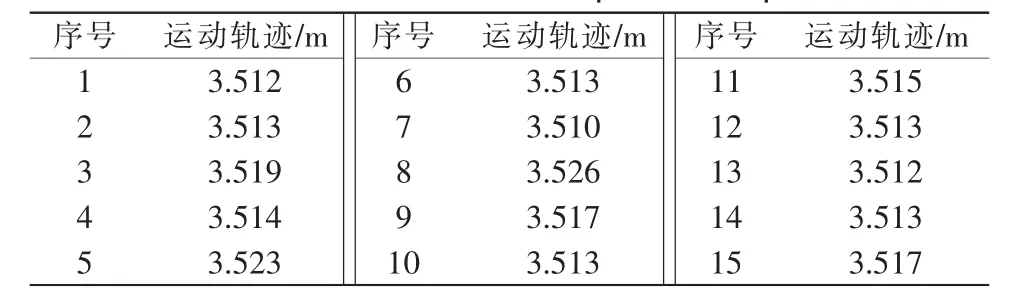
表1 重复实验下的运动轨迹情况Tab.1 Motion trace under repeated experiments
由实验数据得出其中最远偏移的距离为1.6 cm,可以得出由障碍物排斥影响的效果较小,动态路径规划效果较好,证明了人工势场法和计数算法的有效性。
巡检机器人面对较复杂障碍物情况时的避障方案:
(1)面对柱形障碍物进行绕柱
将设计代码输入到电路板中使巡检机器人运用超声波传感器识别距离在3~7 cm 之间[12],且在周围无障碍物的前提下,代码控制巡检机器人会向右进行平动此时开始计数中的加法计数,并且此时巡检机器人左侧的近红外始终处于触发状态,当左侧近红外不触发时,停止加数,机器人继续向前运行,此时机器人后面的近红外向左监测到障碍物开始触发,当近红外不触发时小车开始向左进行计数减数,当减到0 时小车即为已经绕开柱形障碍物继续前进,具体轨迹如图9 所示。
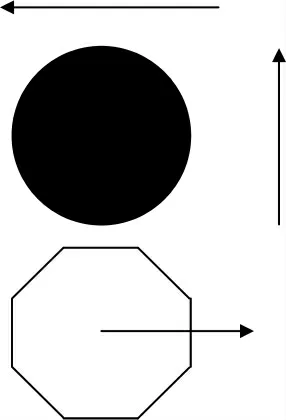
图9 绕柱运行图Fig.9 Column winding operation diagram
(2)当前方和右侧监测到障碍物
这种情况下小车的前侧超声波传感器和顶部近红外传感器同时检测到障碍物的存在,变进行向左平动,直到超声波传感器检测前方无障碍物为止[13],轨迹如图10 所示。
4 结语
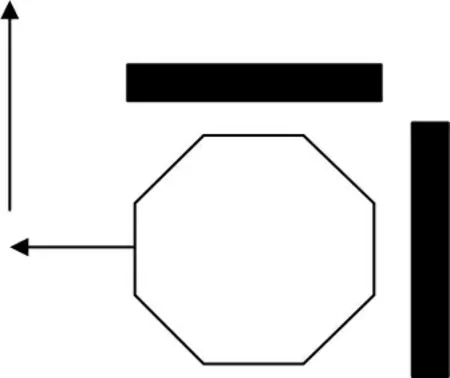
图10 面障碍物避障图Fig.10 Obstacle avoidance
本文进行了对电力巡检机器人自动避障与轨迹规划系统的研究,提出了完整的设计方案,通过外形设计和内部代码完成对巡检机器人功能和运动的实现,通过运用多种传感器协调配合来对机器人对障碍物的识别及避障进行完善,在运用计数算法和人工势场法来实现在位置环境下向目标地点的动态轨迹规划。 最后通过实验测试相应功能,证明该系统的可行性。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
汽车工程(2021年12期)2021-03-08
当代陕西(2020年15期)2021-01-07
湖北汽车工业学院学报(2020年4期)2020-12-31
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
北京汽车(2019年4期)2019-09-17
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
第二课堂(课外活动版)(2015年4期)2015-10-21
