
一种关于智能车多模式纵向速度控制方法的论述
2020-08-28 06:16雷永富赵松岭王红余陶华胜
汽车电器 2020年8期
雷永富, 赵松岭, 王红余, 陶华胜
(奇瑞商用车(安徽) 有限公司, 安徽 芜湖 241003)
在智能车的运动控制中,为了保证车辆的舒适性、安全性和稳定性,车辆纵向速度的控制是至关重要的,现有的速度控制大多依据经典的PID控制实现油门和制动的实时调节来对智能车的速度进行控制。然而,当智能车处于不同行驶模式(加速、匀速、制动、紧急制动) 工况下,智能车的运动特性是截然不同的,这就需要针对不同的行驶模式采用不同的PID调节参数,进一步相关参数的获得也并不是十分容易的。反观现实中,熟练驾驶员可以依据个人经验实现不同工况下车辆的高品质速度控制。
因此,在智能车的速度控制问题中可以充分地借鉴人的经验来改善智能车的速度控制品质,提高智能车在城市交通环境下的乘客乘坐舒适度、安全性和稳定性。
为解决上述问题,本文论述了依据不同的行驶模式和不同的行驶速度区间,通过查询在不同工况下的油门和制动初值,并通过实时的闭环微调,实现智能车的高品质速度控制。具体可以简单概括为:①首先根据前一个周期检测到的加速度进行行驶模式判断,包括:加速、匀速、制动、紧急制动等4种行驶模式;②将前一个周期检测到的速度划分到预先拟定的速度子区间;③进入相应的行驶模式控制流程,并依据速度区间查询控制表中的油门和制动的控制初始值,并通过闭环微调,实现相应行驶模式的速度控制。
1 智能车纵向速度控制器
智能车的纵向速度控制器结构如图1所示。
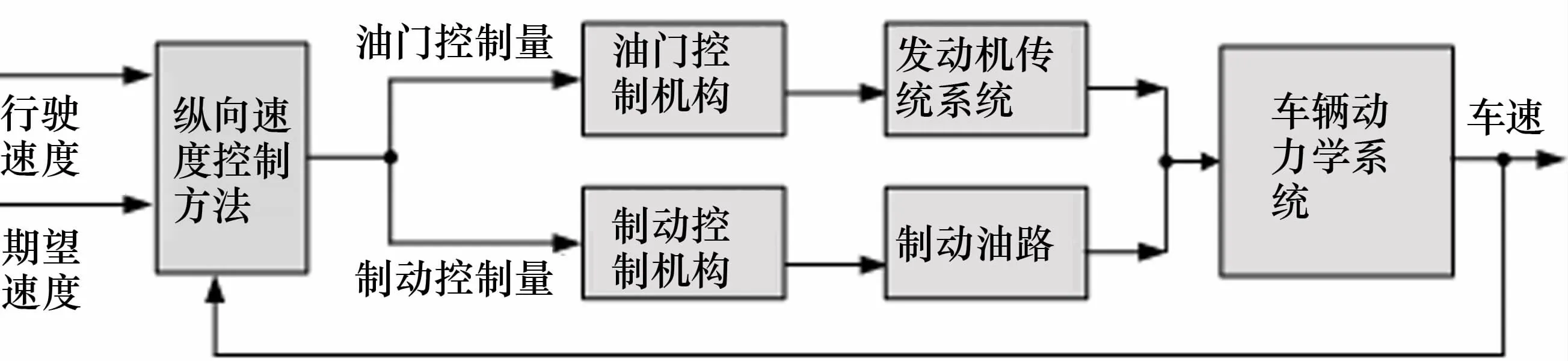
图1 智能车纵向速度控制器结构
纵向速度控制器的核心是纵向速度控制方法,其将完成油门、制动切换策略分析和控制量计算等工作,体现到车辆动力学系统上,构成闭环控制。同时由正常驾驶员的驾驶习惯可知,油门控制和制动控制在同一时间只能有一个产生作用,即:进行油门控制时,制动控制量必须为零,制动机构不工作;进行制动控制时,油门控制量必须为零,油门控制机构不动作,以免造成运动干涉。纵向速度控制方法流程如图2所示。
2 智能车纵向速度控制策略
结合图2所提出的方法,各种行驶模式对应的速度控制策略步骤如下。
2.1 行驶模式判断
若上一工作周期行驶模式为加速,则模式判断结果如下。
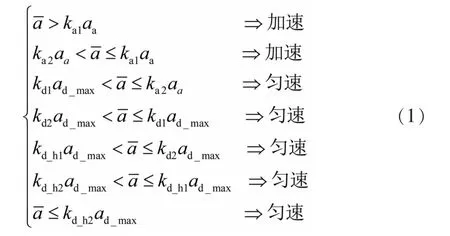

图2 智能纵向速度控制流程图
若上一工作周期行驶模式为匀速,则模式判断结果如下。

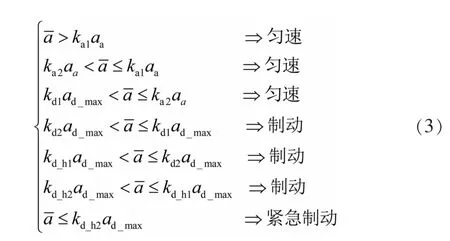
若上一工作周期行驶模式为制动,则模式判断结果如下。
若上一工作周期行驶模式为紧急制动,则模式判断结果如下。
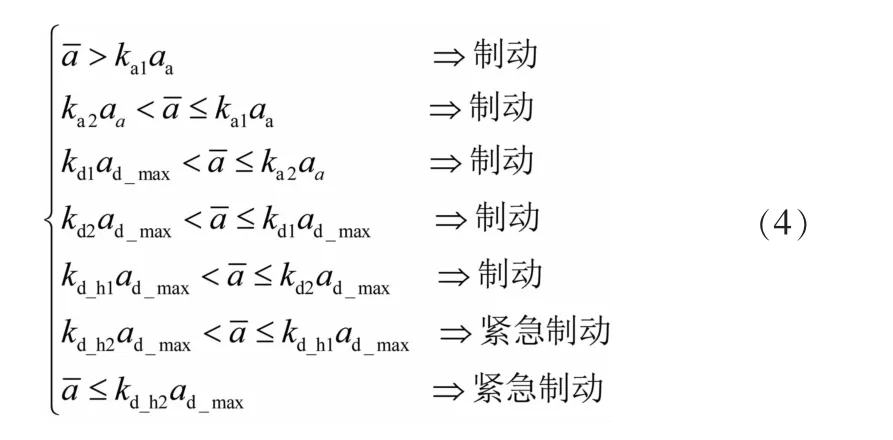
式 (1) ~(4) 中,ka1、ka2、kd1、kd2、kd_h1、kd_h2分别为相应的阈值系数,都为正。ka1反映了规划出加速模式的频繁程度,此值越小,进入加速模式的次数越频繁,即车辆行驶越激进,该值的取值范围为0.7~1;ka2为与ka1对应的阈值系数,为保证足够的缓冲区域,该值应与ka1有一定的偏差;kd2反映了匀速模式能达到的最小减速度;kd1为与kd2对应的阈值系数,该值同样应与kd2有一定的偏差,且为了充分利用匀速模式该值不能太小;kd_h1反映了规划出的紧急制动模式的频繁程度,同样也定义了紧急制动时减速度的大小;kd_h1为与kd_h2对应的阈值系数,该值同样应与kd_h2有一定的偏差,一般取1。
2.2 速度区间判断
速度区间判断依据事先定义完成的速度区间表,该表由现实智能车平台实验得到,记录了该平台各换挡点的速度,可由式(5) 描述,依据该表,即可判断某一速度所在的速度区间Rυ,如式(6) 所示。

2.3 不同模式下油门和制动量的控制量获取
2.3.1 加速模式
若当前模式为加速模式,则进入加速模式控制流程,首先根据当前速度所在区间Rυ查询加速油门人工控制经验初值表,得到该区间对应的加速油门初值,详细地,人工控制经验初值表通过若干个基于道路试验的油门量统计得到。
加速油门初值表的查询过程可如式(7) 和(8) 所示。

除了油门初值外,还需要再附加一个油门控制累加量Cgas2加速,一般可以用比例控制得到,用公式表示如下。

两项相加即可得到加速模式的实际油门控制量Cgas加速。与此同时,为了防止油门量变化过大,需要对其进行饱和处理,如式(10) 所示,既保证了当前速度区间的最终油门量不大于下一速度区间的油门初值,同时也保证了车辆在不同速度区间变化时油门的连续。

2.3.2 匀速模式
若当前模式为匀速模式,与加速模式类似,首先根据当前速度所在区间Rυ查询匀速油门人工控制经验初值表Mgas匀速(Rυ),得到该区间对应的匀速油门初值Cgas1匀速。详细地,该表也由若干个基于道路试验的油门量统计得到。
同样地,除了匀速油门初值外,还需要再附加一个匀速油门控制累加量Cgas2匀速,一般可以用比例控制得到,用公式表示为:

两项相加即可得到匀速模式的实际油门控制量。与加速模式一样,需要对匀速油门进行饱和处理,如式 (12) 所示,既保证了当前速度区间的最终油门量不大于该速度区间的加速度油门初值,同时也保证了车辆在匀速、加速模式变化时油门量的连续。

2.3.3 制动模式
若当前模式为制动模式,则进入制动模式控制流程,首先根据当前速度所在区间Rυ查询制动人工控制经验初值表Mbrake制动(Rυ),得到该区间对应的制动初值Cbrake1制动。详细地,该表同样由若干个基于道路试验的制动量统计得到。除了制动初值外,还需要再附加一个制动控制累加量Cbrake2制动,依旧用比例控制得到,用公式表示为:

两项相加即可得到加速模式的实际制动控制量Cbrake制动。为了防止制动量变化过大,对其进行饱和处理,如式(14) 所示,保证了制动模式与紧急制动模式切换时制动量的连续性。

2.3.4 紧急制动模式
若当前模式为紧急制动模式,则进入紧急制动模式控制流程,首先根据当前速度所在区间Rυ查询紧急制动初值表Mbrake紧急制动(Rυ),得到该区间对应的制动初值Cbrake1紧急制动。该表同样通过道路试验统计得到。除了紧急制动初值外,还需要再附加一个紧急制动控制累加量Cbrake2紧急制动,用比例控制得到,用公式表示为:

两项相加即可得到紧急制动模式的实际制动控制量Cbrake紧急制动。为了防止制动量超出制动系统控制量的上限,需要对其进行饱和处理,如式(16) 所示。

2.4 获取的不同模式下油门和制动量下发给油门和制动控制系统
将获取的不同模式下的油门和制动量下发给油门和制动控制系统,系统接收到控制量对油门开度或制动器进行调节,最后体现到车辆的动力学系统,获得期望的行驶行为和速度,形成闭环控制。
3 总结
本文论述的智能车根据不同行驶模式的纵向速度控制方法不仅具有时间上的向后预测性,同时也避免加速度的突变问题,在控制上充分利用匀速模式小幅度精确控制的特性,实现加速、匀速、减速之间的平滑过渡,同时双阈值系数的使用能对规划行驶模式进行滤波,避免了其反复跳变,更加符合驾驶员的驾驶习惯,在实现相应行驶模式控制的同时,有效提高乘坐的舒适性和安全便捷性。
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
岷峨诗稿(2020年4期)2020-11-18
理科考试研究·高中(2017年8期)2018-03-06
试题与研究·高考理综物理(2016年3期)2017-03-28
债券(2016年11期)2017-01-12
汽车之友(2016年10期)2016-05-16
证券市场周刊(2016年17期)2016-05-10
中学生数理化·高二版(2008年7期)2008-06-15
