电磁导航系统辅助后交叉韧带重建胫骨隧道定位的效果评价
2020-08-26 08:07:40胡鹏宇余志平刘端正贾国庆张海清丛海波
实用骨科杂志 2020年8期
胡鹏宇,余志平,刘端正,贾国庆,张海清,丛海波
(青岛大学附属威海市中心医院运动医学科,山东 威海 264400)
随着高能量创伤的增多,后交叉韧带(posterior cruciate ligament,PCL)损伤较之以前更为多见,约占膝关节急性韧带损伤的20%[1]。若不行手术治疗,严重破坏膝关节稳定性[2],易引起迟发性膝关节退变[3]。目前主流手术方式为关节镜下后交叉韧带重建术,但由于PCL止点位置较深,且与腘窝血管神经毗邻,给手术带来困难[4],如何在安全的前提下重建PCL并获得满意的膝关节功能一直是研究的焦点。笔者通过电磁导航技术来定位胫骨隧道,辅助PCL重建,取得较好效果,现报告如下。
1 资料与方法
1.1 一般资料 新鲜冰冻成人下肢膝关节标本30例,不计性别、年龄及左右侧,标本由青岛大学附属威海市中心医院提供,本研究通过青岛大学附属威海市中心医院伦理委员会审查,依托青岛大学医学院及威高机器人有限公司,研究开展前已行3D打印膝关节模型实验验证。
1.2 建模 术前扫描30例膝关节CT,将数据导入电磁导航系统,导航设备由威高机器人有限公司提供。所有标本均做腘窝处切口解剖出后交叉韧带于胫骨的止点,清理足印区,以止点中心为圆心标记半径7.5 mm同心圆,逐层缝合切口。
1.3 手术方法
1.3.1 安装及注册、校准导航设备 将电磁定位Maker固定于胫骨结节下方骨性结构明显处,注册,采用描点法完成二次配准(见图1),将胫骨导向器上的定位套筒进行校准。于导航工作站的实时图像上规划最优胫骨隧道路径(见图2),测量胫骨平台水平面与胫骨隧道所成角度、隧道长度并记录。

图1 采用描点法完成配准大体照及示意图

图2 导航工作站完成路径规划示意图
1.3.2 关节腔清理、重建胫骨隧道 作常规内侧及外侧入路,关节镜下清理关节腔(见图3),暴露手术视野。将装有定位装置的后交叉韧带重建胫骨定位器置于关节内,此时“虚拟导向套筒”实时出现在导航工作界面上,并随着导向器位置实时变化。调整“虚拟导向套筒”位置、角度直至达到术中规划方案的要求,沿导向套筒方向钻入克氏针,术中C型臂透视标准侧位片,测量胫骨隧道与胫骨平台矢状角度及隧道长度,沿原腘窝切口解剖出后交叉韧带于胫骨止点足印区,测量出针点距足印区圆心距离并记录(见图4)。
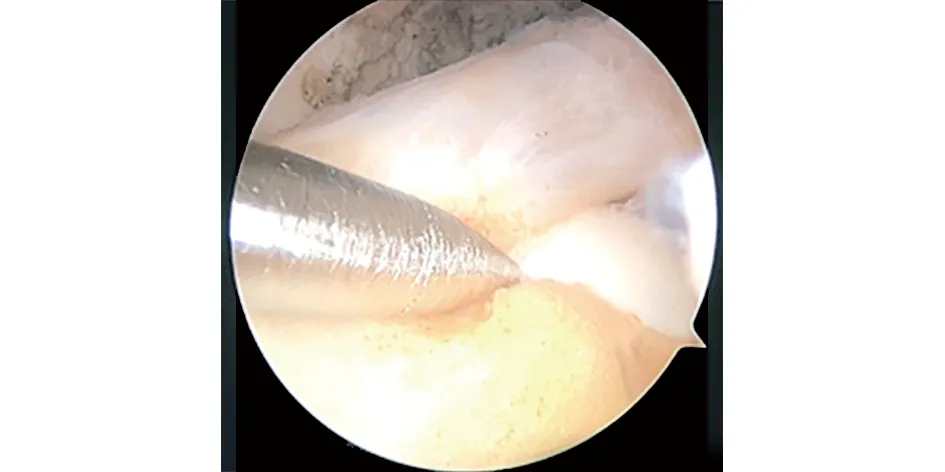
图3 关节镜下常规入路行关节腔清理

图4 验证出针点位置大体照
2 结 果
在纳入研究的30例膝关节中,每例穿刺次数均为1次,28例出针点位于术前规划好的足印区内,2例偏差较大,且导致胫骨隧道后壁破裂。按针尖距圆心的距离分为三度,优(一度):≤2.5 mm;良(二度):>2.5 mm且≤5 mm;合格(三度):>5 mm且≤7.5 mm;无效:>7.5 mm。其中优19例,良5例,合格4例,无效2例;有效率93.33%,有效例数中优良率85.71%(24/28)。术前规划矢状角度(59.72±2.32)°,术后实测(59.55±2.35)°,误差(0.16±1.9)°;术前规划胫骨隧道长度(69.56±2.79)mm,术后实测(70.34±2.38)mm,误差(-0.78±2.27)mm。术前规划胫骨虚拟隧道矢状角度、长度与术后实测比较差异均无统计学意义(P>0.05)。
3 讨 论
膝关节后交叉韧带起于股骨内髁的外侧面,止于胫骨平台髁间嵴后方之间,平均长度为37 mm,是维持膝关节稳定的重要结构[5],主要作用是限制胫骨后移、稳定膝关节旋转中心[6]。关节镜下重建PCL,传统选用前内及前外侧入路下重建胫骨隧道技术,但PCL止点位置较深,与腘窝血管神经毗邻,胫骨隧道内口与腘动脉之间的平均距离约6mm,传统入路无法充分显露PCL下止点以及后侧间室,从而导致无法精确定位胫骨隧道内口[7],且在胫骨隧道建立过程中易发生腘窝血管神经损伤[8]。
目前尚无一种理想的、被广泛接受的PCL重建方法,在众多影响PCL重建术后效果的因素中,术后残存松弛[9-11]现象是有待解决的主要问题之一。而移植物与胫骨隧道口之间相互磨损,导致移植物机械强度下降、隧道口扩大与其形成密切相关,又被称为“杀手转弯”[12-13],要减少“杀手转弯”效应必须加大胫骨隧道与移植物之间的角度以减少磨损[14]。有研究表明,有效长度较短的移植物比较长的移植物具有更高的拉伸刚度和移植物抗性[15],因此对胫骨隧道三维空间位置提出了很高的要求,在保证隧道出口位置准确性(位于后交叉韧带的胫骨解剖区域内)的同时还需控制隧道的矢状面角度。随着关节镜器械的发展,虽然后交叉胫骨定位器很好的解决了此问题,但受限于关节镜视野、二维视效及个体差异性,实际手术操作中还是很难做到精确定位,主要有以下原因:(1)缺乏重复性良好的标志点来辨认交叉韧带残留印记,使得定位插入点困难。(2)个体差异性大,无法用统一的解剖理论来指导操作。(3)关节镜视野局限,即使有经验的手术医生也很难在二维视效下完成定位。(4)追求更靠下的胫骨隧道出口,容易导致后壁破裂;而太靠上的出口又带来生物力学的改变,无法满足高强度运动及维持膝关节较好的稳定性。
在电磁导航辅助定位下行后交叉韧带重建,体现了其独特的优越性。(1)定位准确:本组30例膝关节中,93.33%的出针点位于足印区内,有效例数中优良率可达85.71%(24/28),术前即可准确测量胫骨隧道长度,可避免钻头过长损伤紧贴胫骨后缘的腘血管神经;术前规划胫骨隧道矢状角,在本组有效的28例膝关节中,平均矢状角(59.55±2.35)°,误差为(0.16±1.9)°,实现“角度最大化”[16],有效避免“杀手转弯”效应,减小反复调整导针所带来的附加损伤[17]。(2)术前规划,缩短手术时间:术前规划路径,避免术中的反复定位耗时,减低术后因手术时间过长带来的并发症,在3D图像实时导航辅助下穿刺,降低了手术难度。(3)减少辐射暴露:其导航原理是当带有电磁感应线圈的部位进入三维磁场中时,根据磁场发生器间的相对位置以及探测器监测到的信号,就可以确定目标的位置和方向,无辐射危害,且其相对于其他光学手术导航等具有定位精准、无术中遮挡等优势。但也存在一定局限性:本组30例膝关节中,2例定位偏差较大,笔者分析与术中“漂移”[18]有关(我们将手术对象的解剖位置在三维空间内相对移动称为“漂移”现象),且术前配准也有较大难度,目前尚不具有明显优势的配准方式。本组实验缺少有效的对照组与大数据样本,且实验于下肢膝关节标本上进行,无法进行有效的关节功能评分来评估术后恢复情况。目前电磁导航下手术正在开展,仍需要更多大样本数据与对照实验来验证,但无论从哪个方面讲,电磁导航技术仍具有独特的优越性,必将为开展更智能的临床手术添上浓墨重彩的一笔。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31 09:46:40
实用器官移植电子杂志(2021年3期)2021-11-30 21:04:13
世界最新医学信息文摘(2021年12期)2021-06-09 08:36:28
中华养生保健(2020年10期)2021-01-18 06:45:58
中华肩肘外科电子杂志(2019年4期)2019-08-24 06:39:14
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
实用皮肤病学杂志(2015年4期)2015-12-22 11:21:42
实用手外科杂志(2015年4期)2015-08-27 01:54:14
实用手外科杂志(2015年4期)2015-08-27 01:54:12
中国当代医药(2015年21期)2015-03-01 02:05:12