
基于固定线路的电动工程车定速行驶控制策略研究
2020-08-23 07:45吴庆立白欢
数码设计 2020年4期
关键词:控制策略
吴庆立 白欢

摘要:针对电动工程车定速行驶控制问题,提出一种基于线路工况的速度控制策略。该控制策略依据轨道线路参數和车辆信息进行牵引计算,并结合射频识别定位系统确定的位置信息,拟合计算出线路目标速度的牵引特性曲线;通过控制输出牵引、制动力矩,实现定速行驶控制。通过应用验证:该控制策略优化了由于地铁线路坡道所占比例大、曲线半径小等因素引起的功率频繁变换问题,实现速度的平稳转换,增加了行车舒适性和续航能力。
关键词:电动工程车;定速行驶;牵引特性;控制策略
中图分类号:U264.91 文献标识码:A 文章编号:1672-9129(2020)04-0076-02
Research on constant speed driving control strategy of electric engineering vehicle based on fixed line
Wu Qing-li1,Baihuan2
Baoji CRRC times Construction Machinery Co, Ltd, Shanxi Baoji 721000, China
Zhuzhou Times Electronic Technology Co, Ltd, Hunan Zhuzhou 412007, China
Abstract:Aiming at the problem of constant speed driving control of electric engineering vehicle, a speed control strategy based on line condition is proposed. The control strategy calculates the traction according to the track line parameters and vehicle information, and combines the position information determined by RFID positioning system to fit and calculate the traction characteristic curve of the target speed of the line; by controlling the output traction and braking torque, the constant speed driving control is realized. Through the application verification: the control strategy optimizes the power frequent conversion problem caused by the factors such as the large proportion of the ramp and the small curve radius of the metro line, realizes the smooth conversion of the speed, and increases the driving comfort and endurance.
Keywords: electric engineering vehicle; Constant speed driving; traction characteristics; control strategy
引言:随着科技的不断发展,低恒速控制系统广泛应用于轨道交通行业,使得行车更加智能、安全。目前轨道车采用的低恒速控制系统,是基于转速传感器进行反馈调节输出[1],其传感器检测准确性直接决定行车控制精度。在既定蓄电池容量下,如何使牵引蓄电池输出最优的牵引能力,成为提高整车续航能力的关键因素。地铁电动工程车具有确定的行车路径和坡道、弯道、隧道等工况信息,所以定速行驶过程中,在具体行车位置、具体工况下就有确定的功率输出,本文将基于该特点,就电动工程车定速行驶控制策略展开研究。
1 系统方案设计
轨道交通行业现有的定速行驶控制策略大多基于传感器反馈车辆行驶速度,根据反馈结果进行速度调节、控制,实现恒速行驶。本文提出的电动工程车定速行驶控制策略,分上层控制器和下层控制器。
上层控制器根据已有的参数确定下层控制器的输出信号,实现定速行驶功率值计算。上层控制器结合线路实际工况参数与车辆参数进行牵引计算,确定实现某设定时速需要输出的牵引功率值,并将路径位置的工况参数、所需功率值导入牵引控制系统;在行驶过程中,通过射频识别定位系统精确定位,牵引控制系统路径位置信息拟合匹配输出牵引功率。
下层控制器根据上层控制器的计算输出,控制牵引功率、电机扭矩的输出。下层控制器通过牵引逆变器调节输出电压和频率大小,实现牵引功率的拟合输出,实现电动工程车的定速行驶控制。
2 基于工况的牵引计算
2.1 轮轴牵引力及轮轴功率计算。轮轴牵引力及轮轴功率与坡道附加阻力、曲线附加阻力、隧道风阻、列车速度、黏着系数等相互关联。
式中:WO表示整车基本阻力;Wi表示整车坡道附加阻力;Wr表示整车曲线附加阻力;Ws表示隧道风阻;M表示整车整备重量(55t);G表示被牵引车重量(110t);R表示最小曲线半径;v表示工程车速度;i表示坡道千分数,Ls表示隧道长度。
根据电动工程车的相关参数,可以确定在不同速度下的计算黏着系数与黏着牵引力。根据线路基本条件及计算公式(10-11),可以计算出设定时速在0~20km/h定速行驶控制时,不同坡道条件下的轮周牵引力及轮周功率;在DC832V牵引蓄电池供电时,确定电动工程车的持续运行轮周功率为300kW,起动牵引力取100kN,可计算出工程车恒功起始点速度为10.8km/h,最大运行速度为40km/h时,工程车所能发挥的牵引力为27kN。
依据上述参数,可得出电动工程车牵引特性曲线和坡道阻力曲线如图1所示。
2.2 電制动选取。在实时车辆控制中,牵引功率输出和制动力矩输出分时作用,该控制策略将设定时速Vs乘以大于1 的系数 p ,得到Vp,将设定时速Vs、轮对反馈速度Vf,Vp做比较作为牵引与制动的切换规则:Vf≤Vs时,给定牵引功率加速控制;Vs
该控制系统中提出的定速行驶速度范围为3~20km/h,依据既有的技术平台,蓄电池电动工程车的制动方式为电制动+空气制动,优先采用电制动。
为确保工程车在低速区具有良好的牵引制动性能,选取最大电制动起始点为5km/h,工程车速度在2~5km/h时,电制动力线性降为零,2km/h以下只有空气制动。根据公式(2)可以得出,单机牵引110t,在38‰坡道上以8km/h运行时,坡道阻力为63.16kN,选取最大电制动力80kN。牵引蓄电池供电模式下的电制动功率均为300kW, 5~12.5km/h时,制动力为恒定制动力80KN,40km/h制动力26KN,12.5~40km/h时,为恒功率制动。
3 信息拟合与匹配输出
3.1 射频识别定位。电动工程车定位精度是该定速行驶控制策略的核心,直接影响牵引功率的输出,只有高精度定位,才能得到准确的道路信息,从而准确匹配路况信息,输出相应功率。该控策略采用射频识别(RFID)定位方法,RFID利用射频方式进行非接触双向通信,实现对物体的识别,并将采集到的标签信息通过无线技术远程传输到处理单元。
该控制策略将无源标签一定间隔固定安放,标签读写器及通讯设备安装于工程车上,并连至牵引控制单元。行驶过程中,工程车通过车载读写装置读取标签内的位置信息,传送至牵引控制单元,实现精确定位。
3.2 坡道与轮轴功率拟合。根据城际铁路设计规范,设计时速在160km/h以下的正线,相邻坡度差大于或等于3‰采用圆曲线型竖曲线连接[4],该定速行驶控制策略采用贝塞尔(Bezier)曲线进行坡度的曲线连接,实现牵引功率的平滑过度。以坡道转折点为控制点,则采用二阶贝塞尔曲线,其方程如式:Bt=(1-t)2P0+2t(1-t)P1+t2P2 (12)
算法中以坡道转折点左侧100米位置的输出功率值作为始点P1,右侧功率值为P2,以转折点作为控制点P0,得到坡道转折处200米范围内的贝塞尔牵引功率输出曲线,即连续的抛物线,与实际轨道连接曲线相耦合。
3.3 下层控制器实现。牵引变流器包括整流单元、逆变单元、辅逆单元和变压器,电动工程车在牵引蓄电池供电时,整流单元通过电抗器实现供电斩波升压为直流DC1800V,逆变单元将中间直流电源DC1800V逆变成VVVF(频率、电压可调的)三相交流电,为牵引电动机供电,实现扭矩输出;牵引控制系统通过调节三相交流电的频率、电压,实现输出功率的调节控制,从而控制电动机扭矩的输出,实现电动工程车的定速行驶控制。
4 现场应用
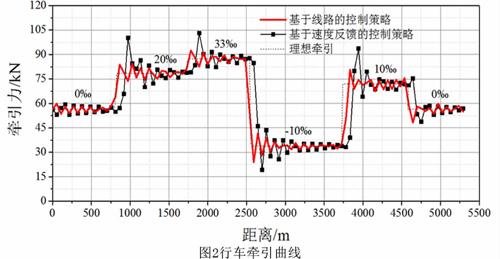
基于本文提出的控制策略,从A站以15km/h的速度定速行驶至B站。行车过程中,记录牵引逆变器的行车参数,得到不同位置线路工况下的牵引力输出值。同时,基于速度传感器反馈控制牵引力输出,在同等条件下行车,得到基于速度反馈的定速行驶控制策略的行车信息,得到的行车牵引曲线如下图2所示。
从图中可以得到,两种控制策略的行车牵引力曲线在理想牵引力曲线附近波动。不同的是,该文提出的控制策略输出牵引力波动较小,根据位置信息提前拟合输出坡度变换后的牵引力,实现了速度的平稳转换,尤其在坡道变换比较大的时候较为明显,试验数据表明该控制策略可以节能20%。现场应用很好的验证了该控制策略较超前预判行车线路信息,拟合输出匹配功率,增加了行车舒适性。
5 结论
通过实例验证了本文提出的控制策略可以很好的解决由于坡度所占比例大,曲线半径小引起的速度转换频繁问题,增加了舒适性;经匹配轨道参数输出的扭矩、功率,避免了速度传感器反馈速度滞后、过调等误差的影响,很大程度减少了不必要的功率输出,实现能量节约,进而提高了电动工程车的续航能力。
参考文献:
[1] 孙正阳. 基于TCN技术的动车组恒速运行控制策略研究[C]. 中国智能交通协会.第八届中国智能交通年会优秀论文集——轨道交通.中国智能交通协会:中国智能交通协会,2013:197-200.
[2] TB/T 1407-1998. 列车牵引计算规程[S]. 1998
[3] 陈丰宇,谭本旭.上海轨道交通蓄电池电力工程车牵引性能参数探讨[J].电力机车与城轨车辆,2013,36(05):61-63.
[4] 孙海富.《城际铁路设计规范》主要技术标准[J].铁道工程学报,2019,36(02):88-93.
作者简介:吴庆立(1982-),男(汉族),高工,宝鸡中车时代工程机械有限公司,主要从事轨道工程机械整车技术研发与应用。
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
电子乐园·上旬刊(2021年7期)2021-07-19
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
电子技术与软件工程(2016年22期)2016-12-26
商场现代化(2016年29期)2016-12-23
中国经贸(2016年20期)2016-12-20
