
基于Simulink 的掘进机截割臂摆角跳动规律研究
2020-08-21 05:21:54王娟
机械管理开发 2020年7期
王 娟
(山西省阳泉市大阳泉煤炭有限公司, 山西 阳泉 045000)
引言
掘进机是煤矿井下用于巷道掘进的设备,其巷道掘进速度及巷道断面的形状直接决定了煤矿井下综采作业的效率,随着掘进机掘进作业自动化程度的不断提升,目前多数掘进机均依靠自动截割控制系统进行自动截割,但在实际应用中发现由于煤矿井下地质结构复杂,掘进机的截割臂在进行水平截割和垂直截割时均会产生摆动现象,对掘进机巷道断面边界的规整度和巷道的成形质量造成了较大的影响,因此,本文利用Lagrange 方程建立了掘进机的动力学方程,利用Simulink 仿真分析软件对掘进机截割臂掘进作业过程中的摆角跳动规律进行研究,获取其变化规律,为优化掘进机截割控制系统控制逻辑、消除截割作业过程中摆臂跳动、提高掘进作业的精度和可靠性奠定基础。
1 掘进机截割臂摆角跳动模型
掘进机在煤矿井下进行掘进作业时,实际上是一个全自由度工作状态,为了降低对掘进机工作时截割臂摆角跳动规律研究的难度,因此选择一个相对典型的工况,将掘进机的重心位置作为原点,建立OXYZ 分析坐标系,同时建立其随机运动时的动态坐标系O'X'Y'Z',其空间分析模型如图1 所示[1]。
图1 中:λ 表示掘进机的截割臂与掘进机机体水平方向上的夹角;Δλ 表示掘进机截割臂工作时的摆角跳动量;θ2表示静态分析坐标系和动态坐标系X 轴之间的夹角在静态坐标系内的投影;SX表示原点O 与O' 间距在静态坐标系X 轴上的投影;SY表示原点O 与O' 间距在静态坐标系Y 轴上的投影;RX表示掘进机截割机构上的截割阻力在水平方向上的分量;RY表示掘进机截割机构上的截割阻力在垂直方向上的分量。

图1 掘进机截割比水平摆动截割空间模型
2 掘进机截割机构受力分析
在对掘进机截割臂摆角跳动进行分析时,应以掘进机截割机构工作时作用在截割机构上的截割载荷作为输入量,假设工作时掘进机水平向右进行运动,其在进行向右侧的截割作业时,岩壁作用在截割机构上的截割阻力是水平向左的,掘进截割臂左侧的执行油缸的无杆腔内充入高压油,将其回转平台向外侧推,因此此时以掘进机的机身回转平台的原点O 为定位基点,系统执行油缸侧推时对于定位基点的力矩MT可表示为[2]:

右侧的执行油缸对截割臂的回拉力对于O 点的力矩值可表示为:

掘进机的截割机构相对于O 点的力矩值可表示为:

式中:P1为掘进机回转油缸的工作压力;S1为掘进机回转油缸的内径截面积;r 为掘进机回转机构半径;l1为原点O 到掘进机左后侧定位脚柱的距离;α 为原点O 到掘进机左后侧定位脚柱方向与到右后侧定位柱脚的夹角;l2为掘进机后侧支撑点到前侧转角点的距离;S2为回转油缸内活塞杆的横截面积;l3为原点O 到掘进机右后侧定位脚柱的距离;γ 为掘进机的截割臂与掘进机机体垂直方向上的夹角。
掘进机在截割作业的时候,其回转平台将受到较大的侧向压力的作用,当进行侧切时的受力较小,而且由于回转平台内的滚筒轴承内的滑动摩擦极小,因此在进行分析时,可忽略在转动过程中回转平台的摩擦力矩的作用,因此当掘进机截割作业时作用在截割机构上的截割力可表示为:

由此分析可知,掘进机在截割作业过程中作用在截割机构上的截割力的变化如图2 所示。
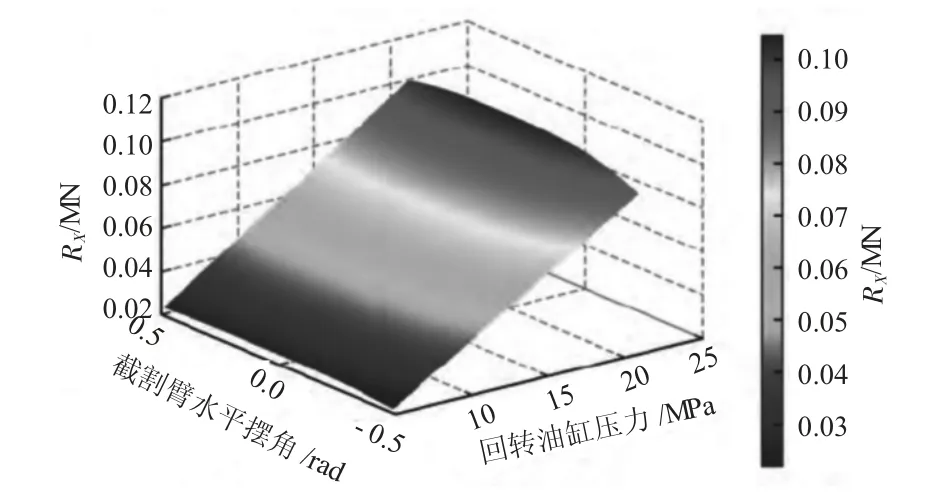
图2 作用在截割机构上的截割力分布示意图
3 仿真分析及试验验证
利用Simulink 仿真分析软件并结合Matlab 力学分析软件[3]建立如图3 所示的掘进机截割臂水平摆角跳动的仿真分析模型。

图3 截割臂水平摆角的仿真分析模型
本文以某型掘进机为例,其工作时截割臂的最大水平摆角为27°,其最大垂直摆角约为37°,因此在对其跳动量进行分析时,对γ 分别为20°、0°情况下的跳动情况进行分析。
为了同仿真分析结果进行对比,本文选取在某矿井下以其实际应用的某型掘进机为研究对象,建立实际跟踪测试系统,其测试设备实物布置如图4所示,其中利用倾角传感器来对掘进机截割臂的摆角进行测定,同时利用各种压力变送器来对工作过程中驱动油缸内的工作压力进行监测,对掘进机截割臂的水平摆动角进行测量时侧在其回转机构的弧长范围内设定一组角度测量仪,由此对其水平方向上的摆动角进行测量。
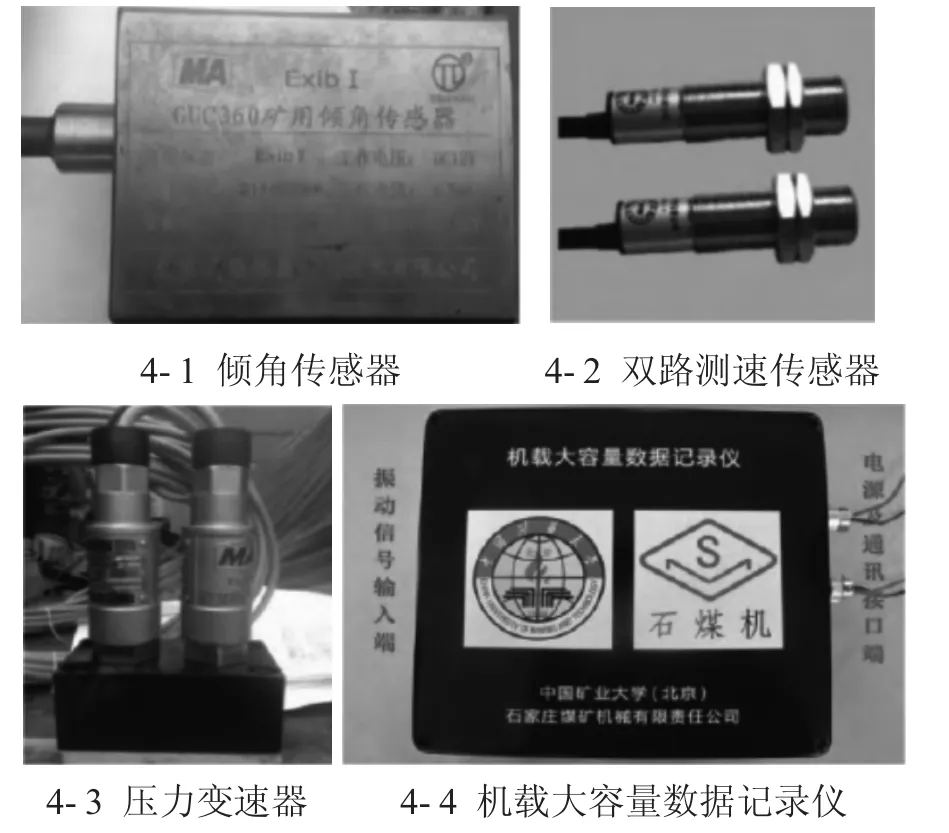
图4 测试设备实物布置图
4 仿真结果分析
将Simulink 的仿真分析结果与井下实际试验结果获取的数据进行拟合[4],进行仿真分析与实际验证结果的实际对比,拟合后的对比曲线如图5 所示。
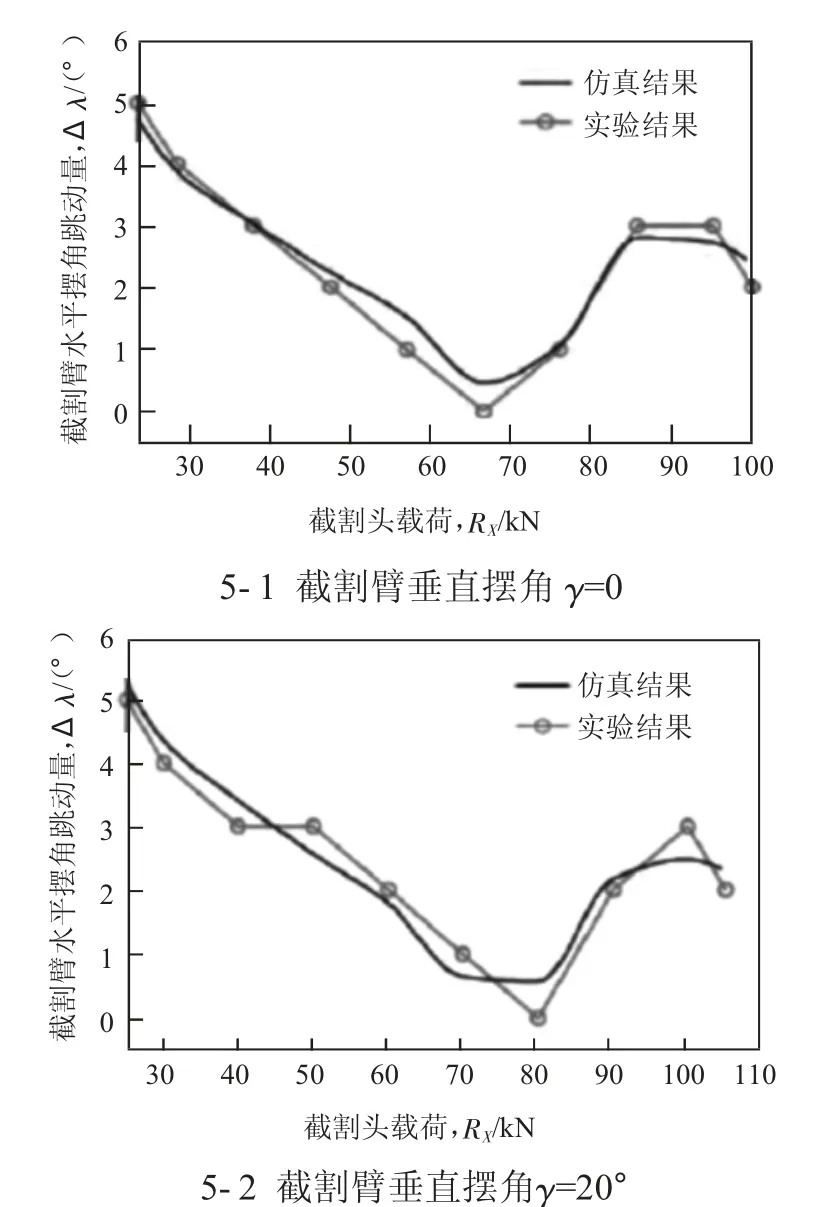
图5 不同摆角下仿真分析结果与实际验证结果的对比
由仿真分析结果可知,当掘进机的截割比在垂直摆动的时候,其截割臂在水平方向上的跳动量的仿真分析结果和实际验证的结构基本一致,且截割作业过程中截割载荷越大,其水平方向上的摆角跳动量呈现了先降低后增加的趋势,根据对比分析结果可知,其摆角跳动量最小约为0.5°,最大约为5.1°。当掘进机的截割臂在垂直方向上的摆角不同时,角度越大跳动越大,当截割载荷在70~80 kN 情况下掘进机工作时截割臂的跳动量最小。
5 结论
1)截割作业过程中截割载荷越大,其水平方向上的摆角跳动量呈现了先降低后增加的趋势;
2)当掘进机的截割臂在垂直方向上的摆角不同时,角度越大跳动越大,当截割载荷在70~80 kN 情况下掘进机工作时截割臂的跳动量最小;
3)以此为基础,能够对掘进机自动截割控制系统的截割臂的摆动量进行修正,大幅提升截割作业过程中截割作业的精确性,确保进行掘进作业效率和安全性。
猜你喜欢
学生天地(2020年17期)2020-08-25 09:28:48
农村青少年科学探究(2020年4期)2020-06-24 11:35:52
制造技术与机床(2019年7期)2019-07-22 03:42:24
红领巾·探索(2018年11期)2018-12-10 01:43:30
测控技术(2018年8期)2018-11-25 07:42:34
亚太教育(2016年35期)2016-12-21 19:41:42
凿岩机械气动工具(2015年3期)2015-11-11 07:32:49
中国机械(2014年23期)2014-10-21 20:07:27
太空探索(2014年3期)2014-07-10 14:59:39
凿岩机械气动工具(2014年3期)2014-03-01 04:00:08
