人工肛门括约肌系统便意感知重建
2020-08-19 02:08:30姜萍萍颜国正王志武华芳芳姚盛健丁紫凡周泽润
上海交通大学学报 2020年8期
朱 东,姜萍萍,颜国正,王志武,韩 玎 赵 凯,华芳芳,姚盛健,丁紫凡,周泽润
(上海交通大学 电子信息与电气工程学院, 上海 200240)
肛门失禁是指人体失去主动控制粪便排泄的能力,是临床上一种较为常见的可能由直肠癌、伤害、事故或先天性遗传引起的非致命性病症.目前针对肛门失禁的手术治疗法主要有括约肌修补术[1-2]、括约肌重建术[3]、结肠造口[4]和骶神经刺激[5]等.但由于手术治疗过程复杂,手术难度大,并发症发病率高,且手术后易复发.针对以上缺点,近年来,人工肛门括约肌成为学者们的研究热点,它的出现为治疗肛门失禁提供了一种全新的思路.
排便控制是涉及结肠输送功能、直肠容量及顺应性、肛门直肠感觉功能、肛门括约肌、盆底肌与神经功能等多机制相互作用的复杂生理功能.肛门失禁的病因也存在直肠容量及顺应性下降、直肠感觉功能不全、肛门括约肌功能失常及神经支配障碍等多种[6].国内外曾提出的一些人工肛门括约肌系统(AAS)有磁性肛门括约肌增强术(MAS)[7]、水泵式人造肠道括约肌(ABS)[8]以及基于NiTi合金的形状记忆合金式人工肛门括约肌系统(AS-SMA)[9]等,虽然在临床实验取得不错成果,但是存在着AAS装置的环形机构挤压肠道时贴合位置易产生高压区造成肠道供血不足甚至肠道坏死、缺少便意感知功能,以及由于系统设计缺陷或材料限制导致的排泄物遗漏、控便不完全等诸多弊病[10].德国弗莱堡大学H.Shrag提出的智能人工肛门括约肌系统(GASS)[11]虽然集成有远程数据传输系统,但直肠压力信号的重建能力以及数据分析预测能力仍不足.
肛门直肠感知能力对于排便控制过程有着重要的意义,人工肛门括约肌系统具有稳定的直肠感知能力重建模块,对于帮助患者实现自主控便并在体内长期正常工作起到至关重要的作用.本人所在的研究团队提出的上一代人工肛门括约肌系统假体结构由上下两个固定环臂、中间1个活动摆臂、微电机控制模块及5个压力传感器组成[12].然而传感器的分布位置是由体外搭建的理想假体夹持模型中归纳得出,且根据相关医学文献设置压力阈值实现排便控制的阈值法[13-14],方式单一,准确性差,很难保证假体在体内实际工作中有效地实现排便控制功能.
针对以上问题,本文开发了一种新的人工肛门括约肌系统,将上下环臂改为活动式结构,与活动中臂一起夹住直肠,在摆臂上安装有10个不同位置的压力传感器.同时,在假体主控模块内部增加了数据无线传输模块,因此可以分析直肠各种不同状态下压力数据的实时变化与不同排泄状态的关系,从而建立更为可靠的直肠感知重建模型,帮助患者得知肠道内容物状态,对人工肛门括约肌系统进行合适时机的排泄控制.结合硬件上对数据采集的优化以及基于主元分析和支持向量机(PCA-SVM)数据分析方法,对建立便意感知重建系统进行研究.
1 人体便意感知机制分析
医学研究表明,人体便意的产生是一个由直肠外围所分布的压力感受器与神经组织和大脑形成的反馈回路,而大量压力感受器集中于直肠壶腹下方所在的盆底组织以及耻骨直肠肌内,当直肠壶腹内存积粪便量达到一定值,便引发排便反射[15].因此人体便意信号的形成取决于靠近直肠壶腹下方的大量压力感受器是否在该段直肠内粪便产生的综合压力刺激下形成生物便意信号,排便反射的形成关键也在于综合分析这些不同位置和方向的压力信号并判断生物便意信号的产生时机.
2 基于PCA-SVM的便意感知
2.1 便意感知重建模型原理
目前,对于便意感知模型的探索均缺少对肠道不同分布点压力的综合分析,从肠道单一位置检测所得的压力信号受腹腔内多种因素的影响,此方法判断便意是否产生可信度低,容错性差.因此,本文对原机构优化,在假体与肠道的接触面上选取10个不同位置的压力检测点,并进行自动秒级周期采集压力传感器数据并无线传输存储至体外设备.大幅度还原直肠表面压力在体内时间和空间上的分布信息,并针对数据特性选择合适的算法组合进行便意状态分类,从而建立起一个效果理想的便意感知重建模型.实验中对实验猪植入优化后的新AAS装置并验证此便意感知重建模型具有良好的识别效果.
2.2 基于主元分析(PCA)的压力信号特征提取
主元分析(PCA)是一种将数据降维的方法,旨在找出几个综合指标来代表原来众多特征,使这些综合指标尽可能地反映原来变量的信息,且彼此之间互不相关,从而简化指标因量.数据冗余可能会导致数据过拟合,为了降低对预测精度的影响,本文使用PCA算法分析动物实验中所采集的各压力指标数据来精简压力指标因量.
2.3 基于支持向量机的便意分类预测
支持向量机(SVM)是一种适合处理二分类问题的模型,其原理是寻找一个超平面对样本进行分割,按照间隔最大化原则进行分割,最终转化为一个凸二次规划问题进行求解,近年来在工程领域的广泛成功应用证明它是一种泛化能力很强的优秀分类工具,且在处理小样本非线性数据的二分类问题上有着良好的表现.本文采用PCA算法与SVM结合的方法,提出一种便意感知重建模型并以两头不同实验猪体内所采集的数据进行验证.
非线性SVM算法是通过非线性变换把输入空间中的非线性分类问题转化为某个n维特征空间中的线性分类问题,在高维特征空间学习线性支持向量机.其算法如下:
输入训练数据集T={(x1,y1),(x2,y2),…,(xN,yN)},其中xi∈n(n维向量空间),yi∈{+1,-1},i=1,2,…,N,xi为同时刻不同压力指标数据组成的第i个多维特征向量,xi组成输入空间Ω,yi为类标记,yi=1时为有便意类,yi= -1 时为无便意类.
输出分离超平面和分类决策函数:
(1) 选取适当的核函数K(x,z) 和惩罚参数C,C>0,其中x,z为输入空间Ω中任意向量,构造并求解凸二次规划问题:
(1)
j=1,2,…,N
(2)
式中:ai为拉格朗日乘子,且0≤ai≤C.得到最优解:
(3)

(4)
(3) 得到分类决策函数:
(5)
针对本实验中样本维度低数量小的特点,本文选用高斯核函数作为分类器核函数:
(6)
此时分类决策函数:
f(x)=
(7)
式中σ为带宽.为免造成SVM过学习通过交叉验证并优先选择惩罚因子C较小的一组作为最优参数构造基于PCA-SVM的便意感知重建模型.
3 直肠原始压力数据采集
3.1 假体内置传感器结构设计
如图1所示,假体摆臂结构设计为3条只可向一侧弯曲的机械摆臂封闭组装而成的钳式结构,植入后套在直肠上,摆臂只可进行两种运动方式,其中上下摆臂向直肠外侧运动,中间摆臂向另一侧运动,到达极限位置时假体完全打开,直肠处于完全松弛状态.上下摆臂与中间摆臂同时向直肠收缩运动,到达极限位置时假体完全关闭,直肠处于完全夹紧状态.
该AAS装置假体摆臂上均内嵌柔性压力传感器,其中在上中摆臂轴向和径向各分布4个,下摆臂径向分布2个,在靠近肛口的直肠段上10个不同位置分别采集压力信号,较为均匀地从不同位置重构了肠道压力模型,不同位置压力传感器及其对应编号如图2所示.其中上臂轴向1、2号两个传感器对应压力指标Pre1和Pre2;上臂径向3、4号两个传感器对应压力指标Pre3和Pre4;中臂径向5、6号两个传感器对应压力指标Pre5和Pre6;中臂轴向7、8号两个传感器对应压力指标Pre7和Pre8;下臂径向9、10号两个传感器对应压力指标Pre9和Pre10.
在体外使用猪大肠模拟新一代人工肛门括约肌系统与直肠的接触受力情况,假体在体内处于夹持状态,猪大肠在无内容物和充盈内容物时两种状态下假体与肠道的接触受力情况如图3所示.新一代AAS系统在靠近假体夹持处的直肠段可采集到不同状态下10个压力传感器反馈的压力数据,图3(a)中标明了在该直肠段所监测的10个不同压力矢量的位置与方向,各压力矢量数值对应其压力指标Pre1~Pre10.
3.2 数据采集存储模块原理
数据采集存储原理图如图4所示,肠道压力经传感器模块转化为压力信号,传感器模块由压力传感器裸片、硅凝胶以及硅胶膜封装的柔性压力传感器和信号放大电路组成,压力信号通过假体主控模块转换为压力数据置入缓存区,通过两种不同方式在体外控制器记录所采集压力数据:
(1) 主控程序设置每8.5 s对全部传感器进行一次毫米级的压力数据采集, 并将每4次采集后缓存区的压力数据打包为合并数据包,发送至体外控制器的数据存储模块;
(2) 体外控制器发送实时读取指令,假体主控模块实时采集当前时刻肠道压力数据,返回体外控制器并由液晶屏实时显示.
3.3 植入实验及数据提取
实验猪采用巴马小香猪,实验开始前每天喂食饲料两次,一次250 g,查阅资料得知猪正常生理状况下每天排便约4次,统计每天排便总量约280 g.动物试验中打断实验猪的肛门括约肌使其失去主动排泄能力,但神经组织仍能感受并发送便意信号[16],新一代AAS装置植入手术及肛门括约肌打断手术如图5所示.
实验过程中按同标准对实验猪喂食饲料并进行24 h视频监控,观察到实验猪产生便意后有主动去往生活场地的某固定排泄场所进行排便动作的行为,观察到的猪正常状态与产生排便意识状态如图6所示.
每天打开一次实验猪体内的AAS装置,对照正常状态的排便量待猪将肠内粪便排空,再关上AAS装置,使实验猪肠道处于控便状态.同时考虑到猪从排空直肠粪便到第一次产生排便意识后,若未及时进行排便则可能会因为肠道排泄物的不断累积反复产生排便意识,此时压力信号对于判断便意是否产生失去了意义,因此通过视频回放寻找实验猪每天在肠内粪便排空后第一次去往生活场地的固定角落进行排便动作时刻所对应的压力信号数据作为有便意标签向量.由于动物实验过程中不可避免出现动物的运动及姿态对压力传感器的作用影响,无线通信模块的通信信号强弱以及一些实验操作中需要间断性地关闭数据流的采集等因素,测得的压力数据中包含有明显的异常值,缺失值等,对该类数据进行去除和标签调整等数据清洗操作后.并在每天排空直肠到第一次产生排便意识期间随机选取4组压力数据作为无便意标签向量.在20天动物实验中共选取80组无便意标签向量和20组有便意标签向量组成5维有效压力指标向量.
4 便意感知重建
4.1 基于前馈神经网络的便意预测
使用基于前馈神经网络的分类识别算法进行便意感知预测,对每个作为压力指标信号的传感器所采集到并在样本中对应的直肠压力信号分别独立进行试验,对10个压力参数各选择90组数据,其中各随机选择53组作为训练数据,37组作为测试样本,10组作为验证数据.设置30个神经元数目,对感知重建模型的输入信号进行分类识别,当首次识别到便意标签对应的压力信号值后,认为大于该压力信号所对应时刻均处于需要排便状态.各组前馈神经网络预测的训练和测试准确率如表1所示.可以看出前馈神经网络最优指标的预测准确率为83.78%.
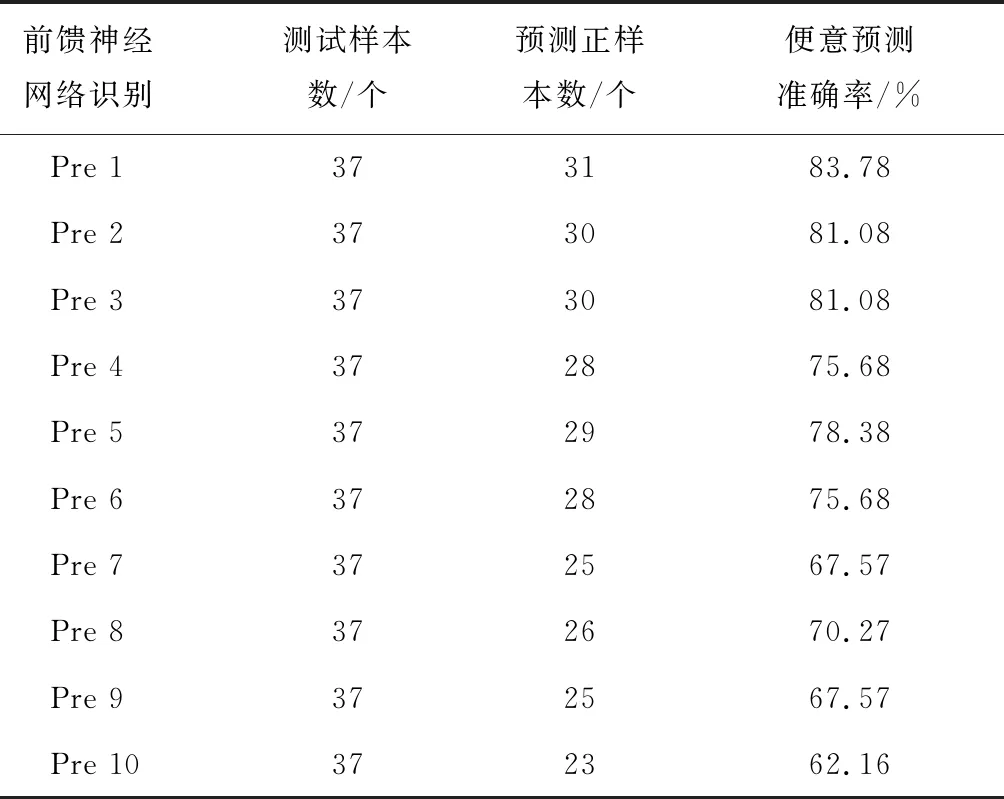
表1 基于前馈神经网络的训练和测试样本分类预测准确率
4.2 基于PCA-SVM的便意预测
再使用基于PCA-SVM的便意感知重建模型对前面提取的100组有效压力指标向量进行分类识别,调用Python sklearn库中的PCA包处理连续20天动物实验中所采集的各传感器对应压力指标数据,绘制其结果如图7所示.可以看出,前6个指标贡献率已经超过85%,因此本文选择前6个压力指标来优化原始压力指标.
选取53组作为训练样本,47组为测试样本,选择高斯核函数并经交叉验证[17]选择最优的惩罚因子C=0.059 5 和核函数宽度σ=0.953 6,将训练样本输入模型后再输入测试样本,设置-1为无便意标签值,1为有便意标签值,检测测试样本中带有便意标签的向量,进行便意感知的预测,其测试样本中实际分类和预测分类如图8所示.其中预测分类集与实际分类集未重合的样本处没有对便意做出准确预测,测得准确预测样本数为44组,可得基于PCA-SVM的便意感知重建模型预测准确率为93.62%.
4.3 便意预测结果对比
前馈神经网络算法预测准确率最高为1号压力指标的83.78%,最低为10号压力指标的62.16%.与基于PCA-SVM的便意感知重建模型预测结果对比如表2所示.
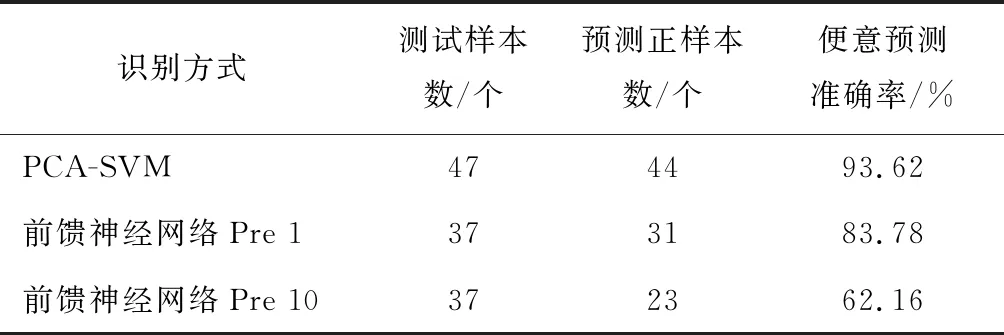
表2 基于前馈神经网络的训练和测试样本分类预测准确率
结合表1,2可以看出,基于主元分析法所选出的优化指标通过PCA-SVM算法和前馈神经网络算法预测的准确率均大于75%,证明选出的优化指标可以代表直肠压力信号的主要特征.对比表2中基于PCA-SVM和前馈神经网络的便意感知模型的便意预测率可以看出,前者的准确率为93.62%,明显高于准确率为83.78%~62.16%的后者,可明显提高对便意预测的准确度.可见,基于PCA-SVM建立的直肠便意感知重建模型是一种更优秀的分类预测方法.实验结果表明,基于PCA-SVM的便意感知重建方法可提高人工肛门括约肌系统对排便时机的感知精确度,弥补了以往系统仅依靠阈值预测法所带来的单一、容错性差等缺陷.
5 结语
为了满足人工肛门括约肌系统在为肛门失禁患者临床治疗过程掌握精确排便时机的需求,分析现有重建患者直肠感知功能方法的弊端,通过在假体摆臂上设置不同位置的多压力传感器以获得更为全面的直肠表面压力原始信号,设计数据采集存储模块并加入体外控制电路以获取在时间序列上直肠表面压力指标向量.通过PCA算法优化指标选择,经调参后的SVM算法进行便意分类预测,对比基于前馈神经网络的分类预测方法,基于PCA-SVM的便意感知重建模型有更为精确的便意预测效果,可在下一步的研究中为新一代人工肛门括约肌设计更为完善易操作的便意感知重建模块提供依据.
猜你喜欢
疯狂英语·新读写(2023年5期)2023-06-02 02:05:02
疯狂英语·新读写(2023年1期)2023-04-06 01:26:32
基层中医药(2022年1期)2022-07-22 07:22:16
临床超声医学杂志(2022年2期)2022-03-08 05:44:54
中国民间疗法(2021年7期)2021-07-22 06:43:34
保健与生活(2020年3期)2020-03-02 02:27:23
养生大世界(2019年6期)2019-06-20 18:48:56
恋爱婚姻家庭·养生版(2019年3期)2019-03-29 06:58:26
特别健康(2017年10期)2017-03-07 01:49:04
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:13