
基于神经网络的水电站智能维护方法研究
2020-08-17 03:11张沛
陕西水利 2020年5期
张 沛
(河南省驻马店市水利工程质量监督站,河南 驻马店 463000)
0 引言
水电站智能维护是实现电站运维水平提升的重要途径,也是当前水电站运行管理的发展方向[1]。因此,基于传感器的水电站电气设备监测数据需要整合、分析,并运用到设备的日常运行维护中去。由于传统水电站运维需要大量人力、物力投入,不仅提高成本,运维工作也不能实现精细化、智能化。为进一步适应智能维护的发展需求,提高水电站电气类设备的安全性和智能化水平,有必要将一些人工研判的操作转换为机器自动判别,实现水电站的智能维护。采用神经网络算法,将设备的监测信息结合历史运维数据,对电气设备的管理进行有效指导。
1 基于神经网络的智能维护模型
1.1 智能维护系统分析
水电站智能维护是继控制自动化、管理标准化后的又一核心领域,运维费用往往占水电站生产成本的30%左右,其中很多是由运维技术、管理落后造成的不必要支出。采用智能维护方法能显著提升水电站经济效益。当前水电站在运行生产中电气设备的前瞻性维护具有较强逻辑性,可认为智能维护系统是由传感器感知态势下,经过神经网络算法产生的设备自动维护功能系统,包含了电气设备运行态势感知数据、神经网络训练模型及智能维护决策三部分。设备运行态势感知层采用总线通信协议,能实现与TCP/IP协议的交互通信。一般而言,水电站电气设备是水轮发电机、变压器、输配电设备等,其中水轮发电机最为核心。由于水轮机在运行过程中,常出现温度报警、甩油故障等问题,因此需要对其进行前瞻性维护。神经网络通过模型训练,获取数据误差,并将误差返回输出值,并以此调整神经元权重,通过监督学习完成回归预测,实现水轮发电机的智能维护。
1.2 神经网络算法模型
水轮发电机调速器通过伺服系统对其叶片开度进行调节,需要有较强的容错控制,对其建立神经网络模型,可通过监测系统实现动态监测,伺服系统实现差错控制。结合水轮发电机结构可知,其伺服系统是非线性的,但故障原因通过经验总结已形成一套完整的处置流程。因此,神经网络采用典型的三层结构,见图1。
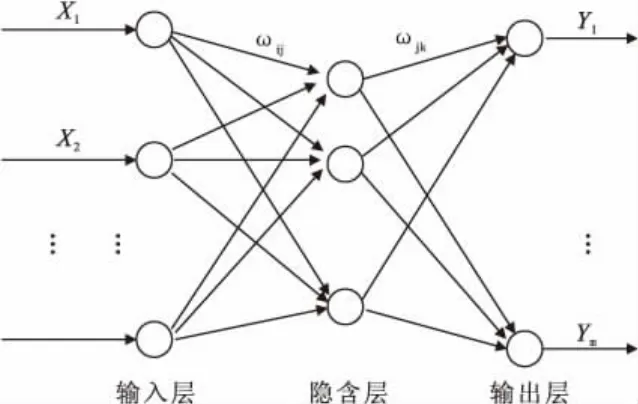
图1 水轮发电机智能运维神经网络结构
由于采用前馈调节网络权值和中间节点阈值,通过误差传递实现各个节点的阈值调节,模拟水轮发电机排查故障的流程,因此建立了水轮发电机物理模型到神经网络数学模型的映射,为故障处理提供前瞻性[2]。
1.3 神经网络训练方法
首先,将网络初始化。确定输入层、输出层以及隐含层节点,并将其赋初值。完成后对节点阈值进行初始化,给定训练速率和目标函数。
第二步,将水轮发电机感知层数据作为输入层变量,同时计算出隐含层,见式(1)。

式中:f(·)是神经网络隐含层目标函数,是典型的指数函数,i为节点数。
第三步,计算对输出层训练结果。通过式(1)的结果,并结合阈值a完成第一步的预测结果输出O,见式(2)。

式中:j代表输出层节点数量。
完成初步结果预算后,应结合水轮发电机故障排查经验,将其作为期望Y,并完成误差计算,见式(3)。

根据求得的误差e,将神经网络阈值进行步进迭代,完成更新,完成迭代后结束计算。根据实际运行中的水轮电机参数判断迭代是否完成,修正经验值。因此,通过水轮电机系统的实时参数可以对水轮机状态进行监控,并根据故障诊断手册自动判断系统故障,提示维护信息。
2 水轮电机故障判定
2.1 故障判定模型
在水电站运行过程中,水轮电机调速器常用PID控制,通过典型的传统函数可以得到水轮电机模型,因此整个系统的结构[3]见图 2。

图2 水轮电机传递函数结构图
通过神经网络计算出传递函数采样的系统偏差,并输入PID控制器对水轮电机调速器伺服系统,实现故障判断,随动系统、水轮机、负载端的传递函数用式(4)、式(5)、式(6)表示。
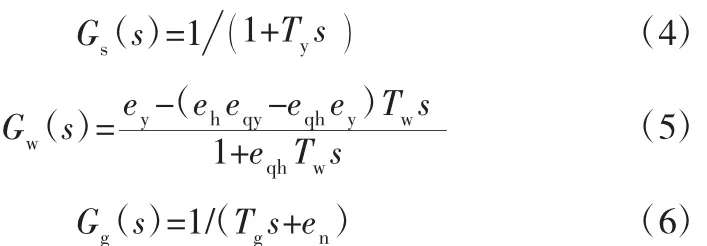
式中:Ty、Tw、Tg分别代表水轮机接力器时间常数、引水惯性时间常数、水轮电机组时间常数;ey、eh、eqy、eqh、en为系统传递函数的系数。
板桥水电站水轮机调速器系统设计水轮电机组时间常数为6 s、引水惯性时间常数为2 s,水轮机接力器时间常数为0.2 s,系统传递函数为2,用系数为1作为传递函数模型初始值,输入神经网络进行计算。按照上述控制模型,传感器将周期采样结果与神经网络输出结果进行比对,并通过误差修正网络。通过以往的运维方案,建立水轮电机两种输出值判别模型,见式(7)。
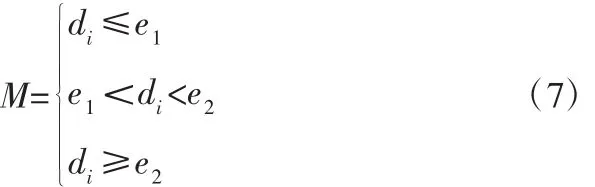
式中:M代表处理模型,di代表神经网络输出结果与传感器监测结果的差值,e1为降阶处理的阈值,e2为故障报警的阈值。
通过这一模型可以对水轮电机的调速器系统做出相应的运维响应。当差值小于降阶处理阈值时,调速系统可以暂不做处理,仅做可接收误差记录;当差值大于降阶处理阈值时,调速系统因根据神经网络输出结果进行调参,并带入神经网络直至迭代到合理范围;当差值大于故障阈值,系统直接发出维修报警,运维人员经查看做出相应的处理。
2.2 故障测试样本
通过传感器监测到水轮电机组的振动基频、振动高频、系统振频、振动—转速相关性、振动—引水流量相关性作为神经网络的特征向量输入网络进行迭代,并进行归一化处理。训练样本及测试集见表1、表2。
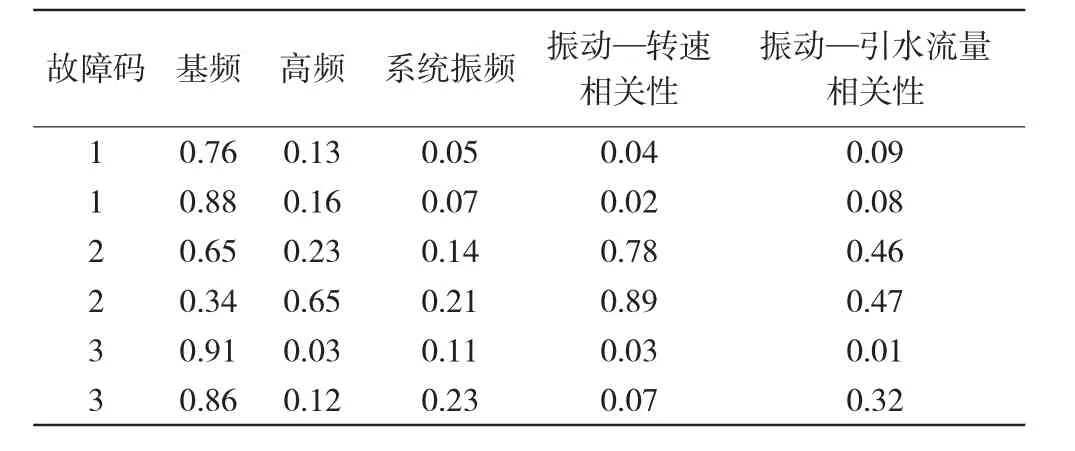
表1 故障样本训练集
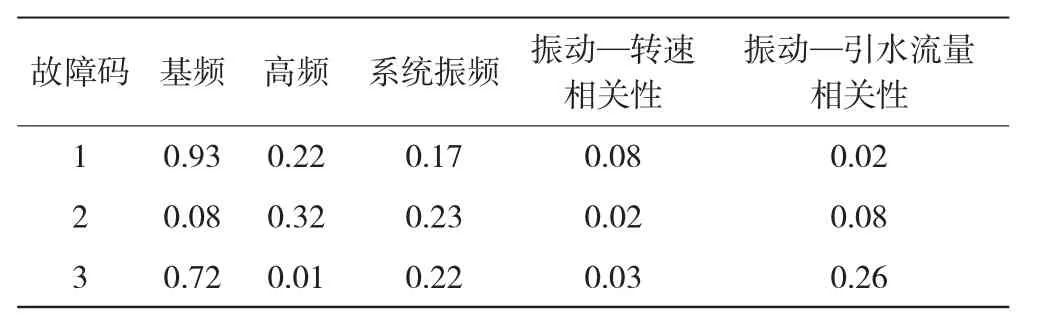
表2 故障测试集
3 结果分析
3.1 故障测试集结果分析
按照板桥水电站设计参数带入模型,将神经网络初始化。选定测试节点,通过神经网络计算某测试周期内的输出值,根据传感器历史测量结果作对比,获得周期内系统故障参数,并通过其变化判定故障和处理方法。在迭代271次,优化64次后,网络曲线收敛,完成了迭代。将训练集结果用测得历史故障参数进行测试,并按照2.1中方法进行故障判断。三组测试样本的实际故障为系统过载运行、水力不平衡及转子失衡,神经网络诊断的结果和实际的故障结果一致性达100%,完成了测试集的正确诊断。测试结果见表3。
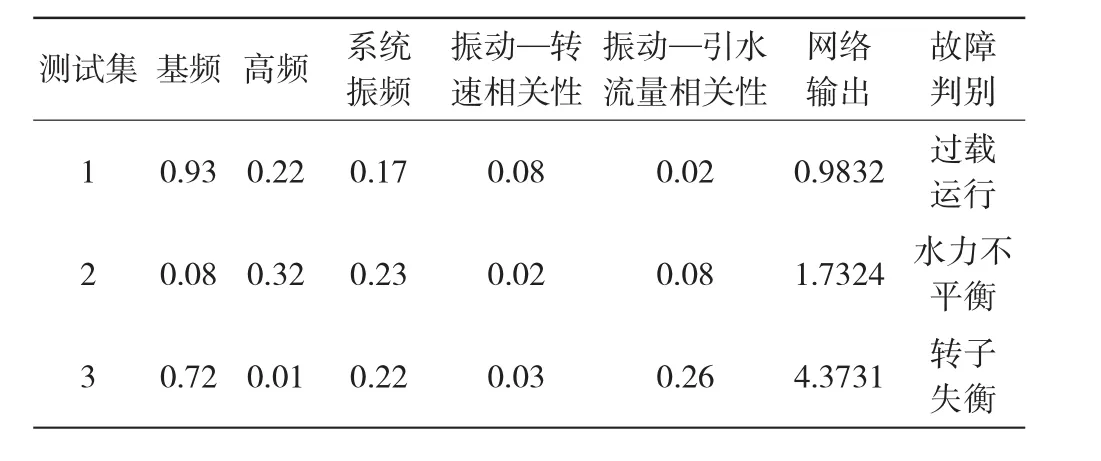
表3 神经网络判别结果
通过测试结果看出,当故障时的传感器历史测量参数输入网络,通过迭代得到的故障判别类型,可以有效预测水轮电机调速系统的未来故障趋势,为了更进一步说明该方法的有效性,将转子不平衡故障以故障判别式进行匹配。如系统正常运转中,转子不平衡故障在临界转速下,随着转速增加而导致的振幅增加,而引起的系统振频瞬时增加。当系统振频与神经网络预测振频差值到达报警阈值时,系统报警;达到停机阈值时则系统停机。测得结果见图3。
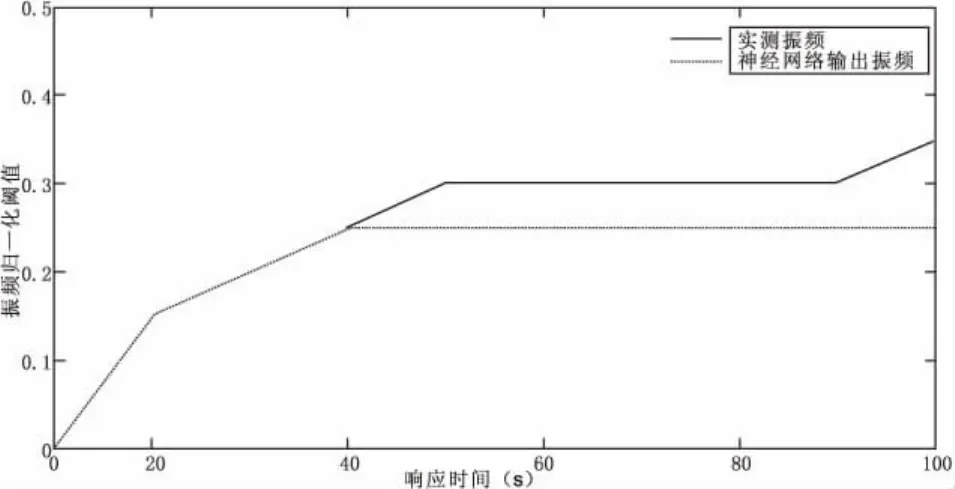
图3 转子不平衡导致振频增加
从图3可知,当响应时间在20 s后,转子不平衡引起系统振频增加,实际测量系统振频随时间增加一直增加,且一直达停机阈值才会报警;神经网络训练模型能在40 s时对系统做出响应,通过相应的转速调节降低振频,使系统不高于停机报警阈值,且一直处于故障报警阈值之上,符合2.1中的故障判别条件2,因此系统报警推送至运维人员,在一定转速能实现定期维护的功能。
3.2 阈值与神经网络对比
将原水轮电机阈值故障判别方法与基于神经网络的故障判别方法进行对比。两种数据集带入模型进行迭代,训练完成后,误差绝对值控制在0.4%以内,但可以明显看出,PID阈值判定的故障误差高于神经网络故障判别,在迭代超过120次后,神经网络误差曲线明显收敛,并高度接近真实故障测得样本,因此三种故障的判定结果准确率能达到100%,两种数据集训练的平均误差曲线见图4。
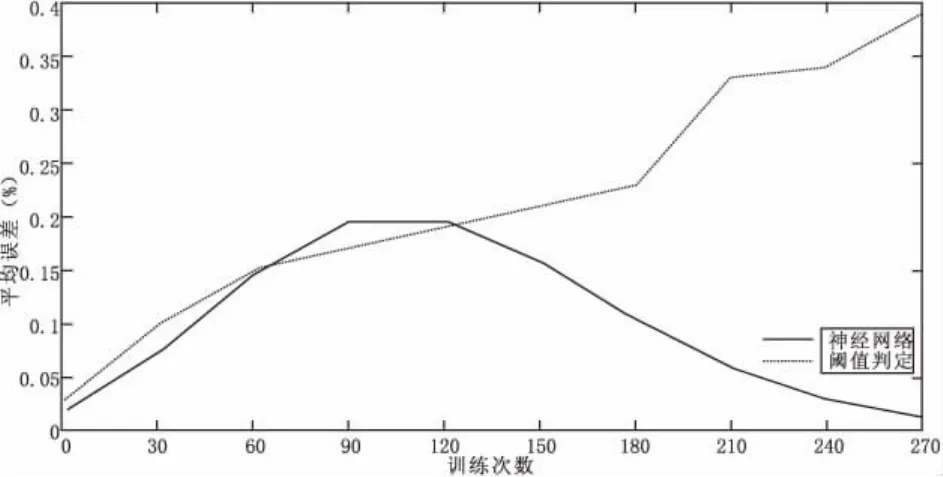
图4 两种数据集误差结果
4 结语
经测试,神经网络在对水电站电气设备的故障判定上有较强的非线性逼近能力,水轮电机故障具有较强的非线性特征,可以用神经网络解决传统阈值判断故障的准确率低问题;同时,神经网络通过迭代后,输出结果误差接近泊松分布,可以有效地为水电站智能维护提供预测和判断。
猜你喜欢
大电机技术(2022年4期)2022-08-30
大电机技术(2022年3期)2022-08-06
中国交通信息化(2022年3期)2022-06-01
西北水电(2022年1期)2022-04-16
防爆电机(2021年6期)2022-01-17
金桥(2021年8期)2021-08-23
防爆电机(2021年4期)2021-07-28
水电站设计(2020年4期)2020-07-16
中国交通信息化(2019年5期)2019-08-30
山东工业技术(2016年15期)2016-12-01
