
基于6LoWPAN的分布式实时索力监测系统设计
2020-08-14 09:59李东明柴小鹏胡亚斌王永涛
现代电子技术 2020年16期
李东明 柴小鹏 胡亚斌 王永涛

摘 要: 桥梁的索力分布反映了结构的整体安全性能。为了测量拉索实时振动频率及实时索力,研制基于时域信号的实时频率测量系统,并利用基于6LoWPAN的分布式网络实现了索力实时监测。首先论述传统基于振动法测索力的基本原理及其缺陷,并分别给出了实时索力监测系统的硬件设计、软件设计,以及基于6LoWPAN的数据传输系统设计,最后进行了传感器测试与拉索实测。实验结果表明,实时索力监测系统能够快速实现分布式索力监测。该文方案为桥梁远程、实时索力监测提供了一种有效的硬件系统及方法。
关键词: 桥梁索力监测; 振频测量; 数据传输; 硬件设计; 软件设计; 传感器测试
Abstract: Cable force distribution of bridge is an important index of the bridge safety. In order to measure the real?time vibration frequency and the real?time cable force of the cable, a real?time frequency measurement system based on the time?domain signal is developed. The real?time cable force detection is realized by using the distributed network based on 6LoWPAN. The basic principle and defects of the traditional vibration spectrum method for cable force measurement are discussed. The hardware design, software design and 6LoWPAN?based data transmission system design are given respectively. The sensor testing and actual inhaul cable testing were carried out. The experimental results show that the real?time cable force detection system can quickly realize the distributed real?time cable force monitoring. This scheme provides an effective method for long?distance and real?time cable force monitoring of bridges.
Keywords: bridge cable force monitoring; vibration frequency measurement; data transmission; hardware design; software design; sensor testing
0 引 言
拉索是现代桥梁结构中的一个重要构件,承载着整个结构的应力分布,该分布衡量着结构状态安全与否。车辆正常行驶及风雨等环境激励引起的振动,以及在后期运营过程中拉索遭受的腐蚀及意外撞击都可能导致应力分布发生改变,从而导致灾难性后果。因此,无论在工程的早期施工还是后期运营,实时拉索索力的监测都是一个非常重要的工作。
目前在拉索索力测量过程中,广泛使用的一类索力测量方法是利用速度、加速度传感器拾取微弱振动,然后利用振动数据的频率分布信息进而计算出索力[1?5]。但是该类方法主要针对静载测试环境,不考虑时变信号。基于频率法的索力测量方法一般只能得到全域频率分布,无法得到当前实时振动频率。利用现代数字信号处理的方法可以由采集到的振动时程曲线得到时频分布,但是同样属于事后分析,不能给出随着振动过程的变化,索力发生的实时变化。文献[6]利用光纤光栅振动传感器拾取振动,然后从全域频率分布中搜索基频,进而得到索力。其本质上仍然不能得到实时索力。文献[7]为了得到时变索力,利用扩展卡尔曼滤波方法跟踪实时索力,但是该方法需要观测大量的全局信息,计算复杂,且在有限观测条件下,识别精度较差。文献[8]将特制光纤光栅传感器预埋到缆索内,利用Bragg光栅反射波长的移动来感应外界缆索索力的实时变化,但是该方法需要预埋工艺、制作及施工成本以及后期维护成本极高,传感器一旦有故障,则无法维修。在桥梁的实际运营过程中,基本不存在静载的测试环境,车辆、行人以及时刻变化的气候环境,都导致索力发生变化。因此,快速、可靠地对拉索索力进行实时监测显得尤为重要。
另一方面,传统的在线监测系统中一般基于有线网络进行数据通信,而在现代桥梁尤其在一些超大跨度桥梁的巡检和中长期在线监测中,数据通信带来的成本与可靠性问题日益突出。传统利用WiFi,ZigBee等无线数据通信方式实现数据组网传输,但是WiFi的通信距离有限,而ZigBee需要单独设计网关[9?12],不利于在超大跨度结构中组网通信。本文提出基于时域信号的实时振动频率测量和实时索力的测量方法及其硬件系统实现,并利用基于6LoWPAN的分布式监测系统实现数据远程实时传输,从而实现实时索力监测。
1 频率法测量索力的基本原理及其缺陷
频率法测量索力的基本原理[1?3]是利用拉索自由振动时其内部应力与频率之间的关系进行间接测量。对于一根自由振动的拉索,其自由振动方程如下:
式中:[t],[x]分别表示振动时间坐标、沿索轴向的位置坐标;[y=y(x,t)]表示在[t]时刻振动点垂直于索轴向的位移。系统的边界条件假设为两端铰支,对方程(1)求解。拉索内部轴向应力F与振动频率[fn]的关系为:
式中:F为内部非时变应力;m为单位长度拉索质量(假设质量均匀);l为拉索的自由长度;EI为抗弯刚度;n为振动谱分布的阶数。式(2)在假设条件下与很多应用有不符合情况,进而存在误差。另外,由于拉索垂度的影响,也导致拉索在自由空间的3个维度上的振动谱分布具有不同的表现。所以,该理论只能用作索力值的大致估算。文献[2]考虑了垂度的影响,引入垂度无量纲常数λ,利用最小二乘拟合索力实用计算公式。其中,[λ2=8mlF2·EI·lFLe,Le=l+l88mlF2]。當[λ2≤0.17]或者[λ2≥4π2]时,索力公式退回式(2);当[0.17<λ2<4π2],索力修正公式为:
从计算过程看,利用频率法间接得到桥梁拉索索力的步骤如下:
1) 对拉索结构静态加载;
2) 对目标索进行一段时间长度为T的振动检测,并假设T时间内拉索的拉力不发生变化,获得该时间内的振动数据,采样率为[FS];
3) 计算该段数据的自功率谱;
4) 根据谱线分布,求得待检测索的振动基频;
5) 根据振动基频进行索力求解。
然而在实际运营过程中,拉索理想的静态载荷并不存在,拉索的振动均为时变激励,比如快速通过的载重卡车引起的索力也在快速变化。而传统的功率谱的计算方法是一种全域的谱计算方法,可以得到全域的谱分布信息,但是无法得到准确的时频信息。
2 基于时域信号的振动频率实时测量
为了观测拉索实时索力,必须得到拉索振动的实时频率。在此选择从时域信号中寻找振动频率信息。
2.1 实时频率测量系统硬件结构
2.1.1 全域频率分布检测电路设计
为了得到待检测拉索的振动谱分布,首先需要进行拉索振动信号的时程曲线采集并进行谱分析。通常拉索在安静的时候振动极弱,而在有车辆及其他荷载存在的时候,振动信号又变得比较强。因此,拉索的低频振动特性对加速度传感器的低频特性、灵敏度和量程,以及对数据采集系统的采样速率和动态范围都有较高的要求。本文采用1通道差分输入24位转换器ADS1255作为A/D转换器,其最高采样率为30 KSPS,ADS1255和CPU之间采用标准4线SPI通信接口。加速度传感器采用ST公司的MEMS加速度传感芯片LIS344。本文取样长度2 048点,采样率为25 SPS,选择Blackman窗进行全域谱分析。全域谱分析负责对待监测结构的振动谱分布做总体评估,一般只执行一次。
2.1.2 实时频率测量系统设计
该部分系统对振动结构的某阶频率进行实时跟踪监测,从而获得实时振动频率。拉索振动信号属于低频、超低频弱信号,同时其振动谱具有一定的梳状结构特性,如果能够设计一种窄带低频带通滤波器,让待观测目标频率通过,同时快速有效地滤除待观测频率之外的其他阶频率,那么在时域就可以快速得到待观测频率信号的频率变化。
如果利用数字带通滤波器对拉索振动谱进行选择,滤波器通常需要很高的阶数才能抑制其他阶的谱峰。同时也带来巨大的时延,使得监测系统无法迅速观测到由于外界荷载的变化导致的拉索振动频率的改变。因此,针对拉索低频振动信号,本文放弃数字滤波器,选择模拟带通滤波器。
MAX260是美信公司的双二阶通用开关有源滤波器,其由外部微控制器精确控制模拟滤波器的滤波参数。通过程序设置就可以灵活构成各种参数的模拟带通滤波器。时钟频率[fclk]与6位设置码一起决定滤波器的[f0]和[Q]值,且两者独立编程互不影响。内部滤波器均具有独立时钟。本文通过32 bit微控制器PIC32MX795控制MAX260实现超窄带通滤波。
本文选择模式1,MAX260的外部控制MCU选择32 bit控制器PIC32MX795。频率控制方式如下:[fclkf0=π(64+NF)2],[Q=64(128-NQ)]。其中,[fclk]为外部32 bit控制器PIC32MX795的输出比较引脚输出的50%占空比的PWM时钟。该时钟利用控制器内部的32位Timer与内部比较器比较,产生反转,同时利用[NF]的可编程值,一起达到精确设置带通滤波器中心频率[f0]的目的。一般情况下,拉索振动频率(单位:Hz)范围[f0∈[0.1,25]],本文系统产生的[fclk∈[137,5 688]]。另外,为了提高待观测频率的通过性,同时最大程度地衰减其他阶频率,本文设计将Q值设置到最高64。模拟滤波器设置过程如下:
Step1:确定模拟带通滤波器的中心频率[f0]。利用本文第2.2.1节中的数据采集系统对拉索振动信号采集一段数据,利用传统频域法得到较长时间内桥梁结构的频率分布,确定需要观察的振动频谱第[n]阶中心频率[f0],从而确定谱线分布间隔[W≈f0n]。
Step2:确定模拟带通滤波器的带宽[B]。该带宽[B]的确定需要满足以下两点:
1) 带宽范围需要包含基准频率随着外荷载作用引起的频率变化范围,[B≤W],通常该条件都可以满足。
2) 当前时刻,该带通滤波器能且仅输出待观察中心频率[f0]附近带宽足够小的窄带模拟带通信号,保证从模拟带通滤波器输出的时程曲线不含其他阶振动频率。考虑到实际拉索力的变化范围,该带通滤波器的带宽为基准频率的±20%,因此模拟带通滤波器的带宽[B=0.4W],因此[Q=f00.4W]。参数[Q]可根据不同拉索的最优带宽值[B]单独优化,[B]越小,能够观察的频率变化范围就越小,测量精度就越高。
Step3:利用地址口[A3..0]和数据口[D1..0]设置模拟程控滤波器MAX260。
Step4:经过窄带模拟带通滤波器输出的振动时程曲线送入高速模拟电压过零比较器,经过整形之后得到方波信号,该方波信号的每相邻两个边沿之间的时间间隔Δt对应0.5个周期,即每0.5个周期内该频率值更新一次,频率测试的实时性与半周期有关。
Step5:开启CPU的输入捕捉模块,并捕捉方波边沿中断的内部时钟计数。做如下设置:设置为上升下降沿捕捉(即捕捉半周期方波);设置捕捉时钟Timer时间分辨率为0.1 μs;设置中断为完成一次上升沿和一次下降沿。
针对Step3中得到的方波信号,一次完整的捕捉得到上升沿时刻的Timer中断计数N1和下降沿时刻Timer中断计数N2。最终每半周期时间更新一次测量频率(单位:Hz):[f=5×106(N2-N1)]。
2.2 基于6LoWPAN的數据传输系统
2.2.1 基于6LoWPAN的通信系统结构
6LoWPAN技术以精简IPv6 协议栈为核心,低功耗传感器网络能够使用 IPv6 技术快速连接到Internet。传感器节点的主芯片选用TI 公司CC2538SF53,其内部集成了符合开放频段2.4 GHz 标准RF 收发器。在低功耗外部中断模式下,芯片待机功耗仅为1.3 μW。系统外扩CC2592以增加收发距离,轻微树木障碍环境下实测点对点收发可以达400~600 m,CC2538利用PC4,PC5与PC6三个端口,实现对CC2592的收发控制。
拉索索力监测系统的监测数据通过基于6LoWPAN组建的MESH网络发送至云端数据中心。实时索力监测系统硬件结构分为3层:第1层为加速度传感器节点,节点内嵌MQTT协议;第2层为6LoWPAN 网络中的Router节点;第3层为云端服务器,本文利用阿里云提供的IoT服务作为云端的数据管理中心。
传感器节点和阿里云对接的过程如下:
1) 注册阿里云的IoT账号,申请并获取传感器的三元组:ProductKey,DeviceSecret及DeviceName;
2) 将三元组固化在传感器节点内,使得传感器节点可以利用MQTT协议和阿里云IoT对接。
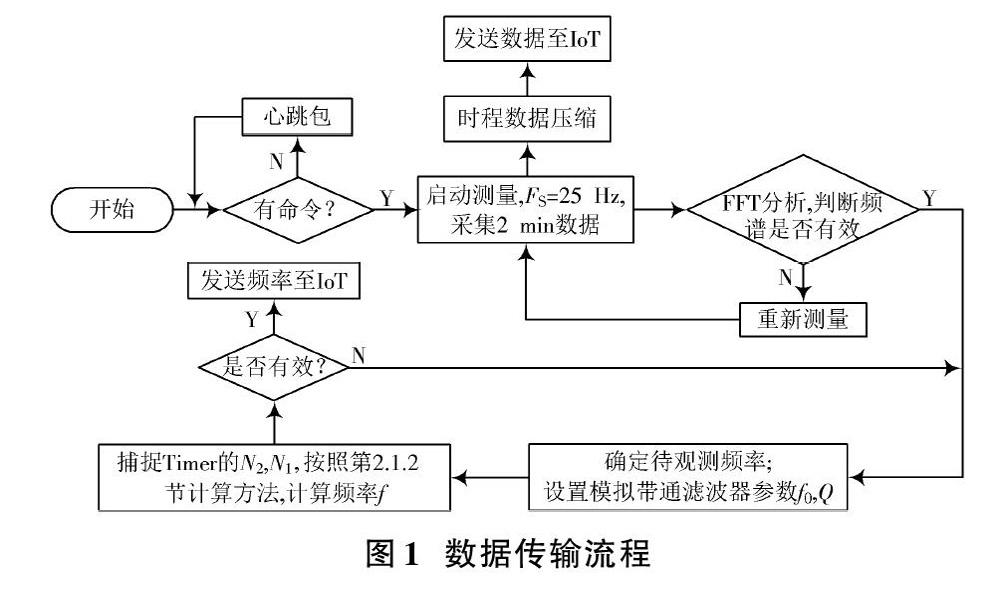
2.2.2 实时频率测量流程与数据传输策略
基于6LoWPAN的数据传输流程如图1所示,分两种情况:实时频率数据传输与完整频谱传输。
1) 实时频率数据传输
频率测量的实时程度和待测信号本身有关。待观测索某阶振动谱中心频率为[f0],则实时频率移动范围为[f∈[f0-0.2B,f0+0.2B]]。因此,频率测量数据从节点上传至云端的时间间隔为:[T∈12f0+0.2B,12f0-0.2B]。对于振动频谱分布处于0.5~10 Hz的长索,数据上传的时间间隔最短为0.042 s。最大程度上实现了频率的实时观测。
2) 完整频谱传输
有时候需要对拉索振动频率分布进行校正,需要上传一段完整频谱,但是较大的数据量使得网络会出现拥堵,因此有必要对完整频谱进行压缩,从而降低传输数据量,延长节点存活时间。规则如下:
1) 将采集到的数据[x={x(n),n=0,1,2,…,N-1}]进行FFT计算,得到功率谱[X={X(k),k=0,1,2,…,N-1}];
2) 将[X={X(k),k=0,1,2,…,N-1}]从大到小排列,取前[N]对谱峰[Y={k,Yk}],其中[k=0,1,2,…,N-1],将[2N]个数据[Y]发送至阿里IoT数据管理中心。
3 实验结果
3.1 传感器性能测试
将MEMS传感芯片和目前常用的电磁式941型传感器进行对比测试,测试平台为振动台、标准传感器BK?8305以及NI数据采集卡USB?6008。LIS344AH的灵敏度为660 mV/g,优于941型电磁式灵敏度:300 mV/g。结果表明LIS344AH的灵敏度满足工程振动频谱测试要求。
3.2 武汉江汉六桥实际拉索测试
3.2.1 拉索振动频率分布测试
测试对象为武汉江汉六桥拉索,把节点布置在索上。图2、图3分别为节点的内部测量电路系统和实际拉索测试的照片,图4为MEMS节点的功率谱分布。
3.2.2 实时频率监测
从第3.2.1节拉索振动谱分布实验中看出,实际拉索振动基频0.995 Hz,针对第4阶振动谱3.986 Hz,本文设计模拟滤波器中心频率[f0=3.986 Hz],模拟程控滤波器MAX260工作在模式1,[NF=63],[NQ=127],则滤波器[Q=64]。
为了使32 bit控制器PIC32MX795输出比较引脚能产生[fclk=f0·π64+NF2=795.172 Hz]的时钟,具体设置步骤如下:
1) 设置控制器系统时钟SYSCLK=80 MHz。
2) 设置Timer时钟分辨率为0.2 μs。设置控制器系统外设时钟为20 MHz,即SYSCLK的4分频,PBDIV=0x02;设置控制器A类Timer的预分频比为8分频,TCKPS=0x02。最终得到Timer的工作频率为2.5 MHz,时间分辨率为0.4 μs。
3) 设置控制器的输出比较模块OC1R=0x0624,使得比较器匹配数据为1 572个时钟匹配一次。
4) 设置输出比较模块OCxCON<2:0>=0x03,使其工作在单比较模式,比较匹配事件使OC1引脚电平翻转,并且该翻转事件是连续的。此时,OC1端口输出795.165 Hz的时钟,误差为0.000 8%。
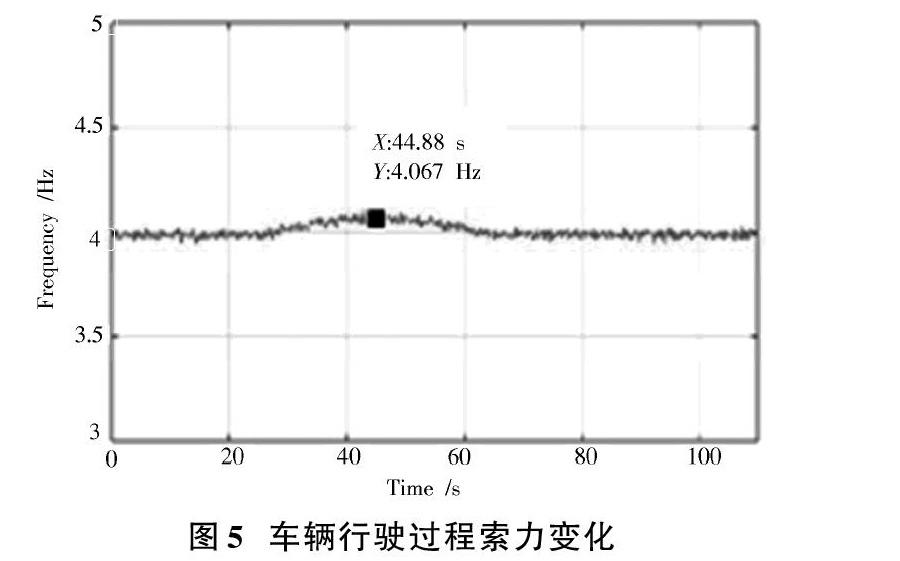
让一辆荷载车以基本匀速40 km/h,从一侧上桥至另一侧下桥,桥全长1.28 km,耗时约110 s,大约在45 s左右经过待检测拉索位置,记录下整个过程的拉索频率变化,如图5所示。
从图5中可以看出,随着荷载车驶近待测拉索,拉索振动频率逐渐变高,在45 s左右荷载车驶至待测拉索位置,拉索频率增大至最大值,随着荷载车的逐渐远离,拉索振动频率逐渐恢复至设计频率。在最高振动频率处,振动频率增加0.081 Hz,大约变化2%,索力增加约8.2 t,实时索力和压力环的测量值相比,误差在1%以内。
4结 论
为了得到拉索的实时索力,本文利用模拟滤波器跟踪拉索振动谱中的某阶谱,得到拉索振动的实时频率,从而得到拉索实时索力。最后利用基于6LoWPAN的MESH网络实现了索力测量局域网和互联网的无缝对接,实现了拉索索力的实时监测。实验结果表明,利用模拟滤波器对MEMS加速度传感器的振动谱进行实时跟踪,并结合基于6LoWWPAN的物联网平台,实现实时索力监测,其数据质量稳定可靠,是传统基于振动法测量索力的有效补充,可以实现大规模分布式实时索力监测。
参考文献
[1] 周先雁,王智丰,冯新.基于频率法的斜拉索索力测试研究[J].中南林业科技大学学报,2009,29(2):102?106.
[2] 毛幸全,刘航,喻言,等.基于无线传感系统的斜拉桥索力测试与分析[J].传感器技术学报,2013,26(2):271?276.
[3] 郑灿.基于频率法的索力测试方法及索的损伤研究[D].杭州:浙江大学,2008.
[4] LIU Lin, CHEN Weimin, ZHANG Peng, et al. Spectrum?multiplication of fundamental frequency for cable force monitoring using frequency method [J]. Chinese journal of scientific instrument, 2011, 32(11): 2443?2448.
[5] YU Yan, ZHAO Xuefeng, WANG Yang, et al. A study on PVDF sensor using wireless experimental system for bridge structural local monitoring [J]. Journal of telecommunication systems, 2013, 52(4): 2357?2366.
[6] 朱万旭,覃荷瑛,李居泽,等.基于锚固区外置光纤光栅传感器的FAST工程拉索索力监测研究[J].机械工程学报,2017,53(17):23?30.
[7] 张福俭,李惠,毛晨曦.基于振动监测的斜拉索时变索力识别方法[J].土木工程与管理学报,2013,30(3):1?5.
[8] 赵霞,刘礼华,吉俊兵,等.智能缆索在京杭运河泗阳大桥中的应用[J].中外公路,2013,33(2):92?96.
[9] 刘耀瑞.基于6LoWPAN的无线传感器网络路由算法研究[D].重庆:重庆邮电大学,2017.
[10] 李东明,胡亚斌,王永涛.基于6LoWPAN 的分布式桥梁索力监测系统设计[J].电子技术应用,2017,43(3):79?82.
[11] WANG Xiaonan, ZHONG Shan, ZHOU Rong. A mobility support scheme for 6LoWPAN [J]. Computer communications, 2012, 35(3): 392?404.
[12] OLIVEIRA L M L, SOUSA A F D, RODRIGUES J J P C. Routing and mobility approaches in IPv6 over LoWPAN mesh networks [J]. International journal of communication systems, 2011, 24(11): 1445?1466.
猜你喜欢
电脑知识与技术(2016年25期)2016-11-16
科技资讯(2016年19期)2016-11-15
科技视界(2016年20期)2016-09-29
科技视界(2016年11期)2016-05-23
