基于Radon变换改进的运动模糊图像PSF参数估计算法
2020-08-13 07:17陈健张欣陈忠仁
软件 2020年6期
关键词:参数估计
陈健 张欣 陈忠仁

摘 要: 为了提高运动模糊图像的点扩展函数中模糊尺度,模糊角度估记的精准性,本文提出了一种改进的模糊图像PSF的参数估计算法。首先将运动模糊图像进行3*3分块,找出最能代表原始模糊图像模糊特征的子图像块,这样可以很好的估计运动参数。然后将特征图像块的频谱图二值化后,进行形态学闭运算消除十字型亮线,有效的提高参数估计的精度。其次,对频谱图进行腐蚀运算,用Radon变换计算出模糊角度。最后根据求出的角度将图像旋转到水平方向后,使用微分法求出模糊尺度。并将本文算法与传统Radon变换算法进行对比,表明该算法对提高模糊图像PSF参数估计是有效的。
关键词: Radon变换;运动模糊;图像分块;参数估计
中图分类号: TP391.41 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.06.001
本文著录格式:陈健,张欣,陈忠仁. 基于Radon变换改进的运动模糊图像PSF参数估计算法[J]. 软件,2020,41(06):0106
【Abstract】: In order to improve the accuracy of blurred scale and blurred angle estimation in the point spread function of motion blurred image, an improved PSF parameter estimation algorithm is proposed. Firstly, the motion blurred image is divided into 3 * 3 blocks, and the sub image block which can best represent the blurred features of the original blurred image is found, so that the motion parameters can be estimated well. Then, after binarization of the spectrum of the feature image block, morphological close operation is carried out to eliminate the cross bright lines, effectively improving the accuracy of parameter estimation. Secondly, the spectrum was corroded and the ambiguity angle was calculated by Radon transform. Finally, according to the angle, the image is rotated to the horizontal direction, and the blurred scale is obtained by differential method. Compared with the traditional Radon transform algorithm, this algorithm is effective to improve the PSF parameter estimation of blurred image.
【Key words】: Radon transform; Motion blurred; Image blocking; Parameter estimation
0 引言
人類从自然界接收的各种信息,超过80%是通过视觉获得的,图像作为一种关键的信息源,是人们感知世界、捕获信息、传递信息的重要手段。图像在获取的过程中,许多因素会使得图像退化,具体表现为图像变得不清晰,根据退化原因主要有离焦模糊、高斯模糊以及运动模糊[1]三类。其中,由拍摄物体和成像设备发生相对运动引起的运动模糊在日常生活中最为常见,本文主要以运动模糊为研究对象。在实际应用中我们需要的是清晰的图像,故通过一定的技术将图像变得清晰尤为重要。通过一定方法计算出原始清晰图像退化时所形成的一些先验知识,包括点扩散函数[1](point spread function,PSF),是实现运动模糊图像复原的关键一步。PSF模糊尺度L和模糊角度θ这两个参数的估记是实现图像复原的关键,模糊尺度L和模糊角度θ能否准确估算出来直接影响图像复原的质量。因此深入研究点扩散函数PSF的参数估记有重大实际价值。本文将在传统图像Radon变换来估计PSF参数的算法上做出改进,提高PSF参数估计的精确性。
1 运动模糊图像退化模型和频谱图
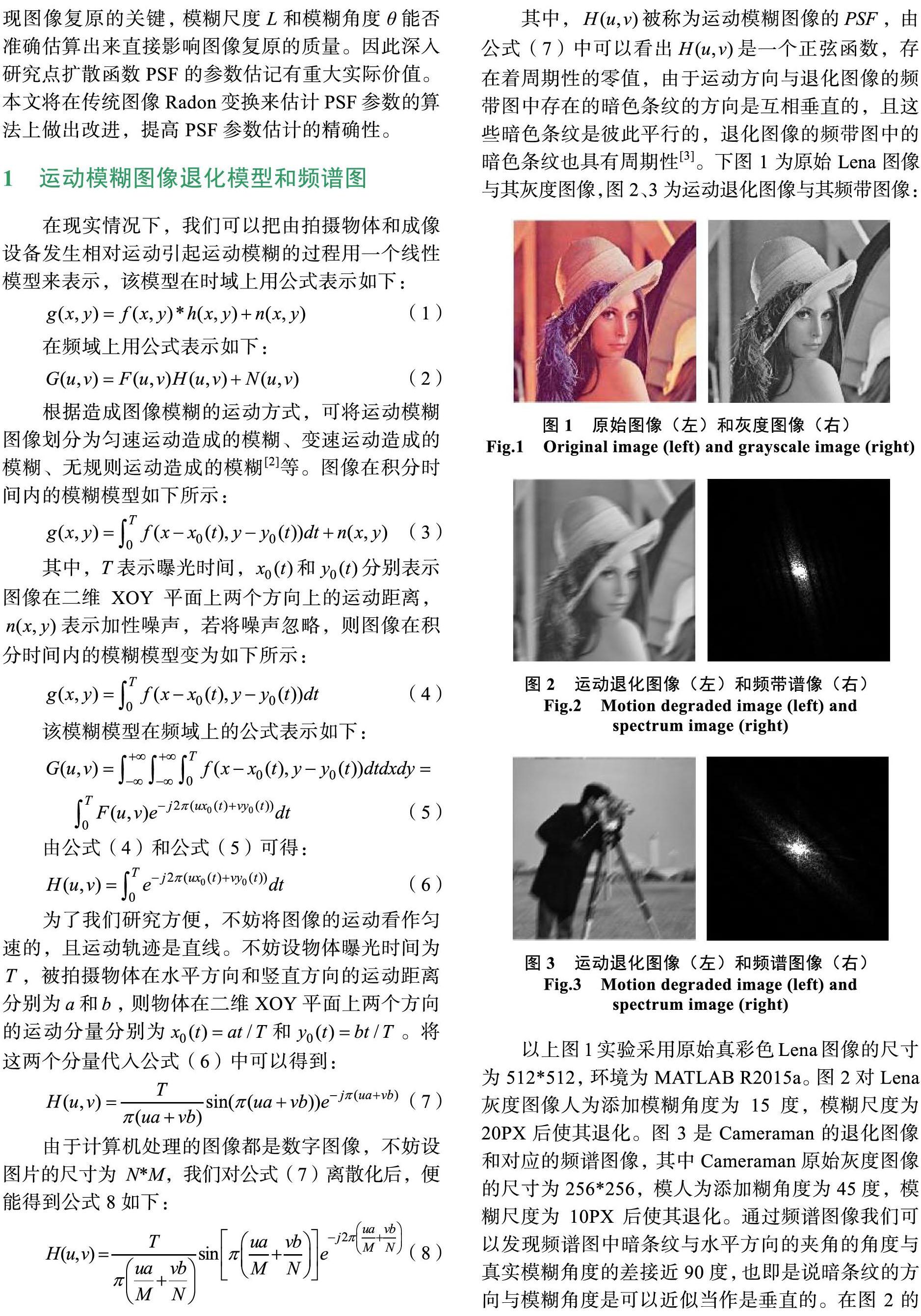
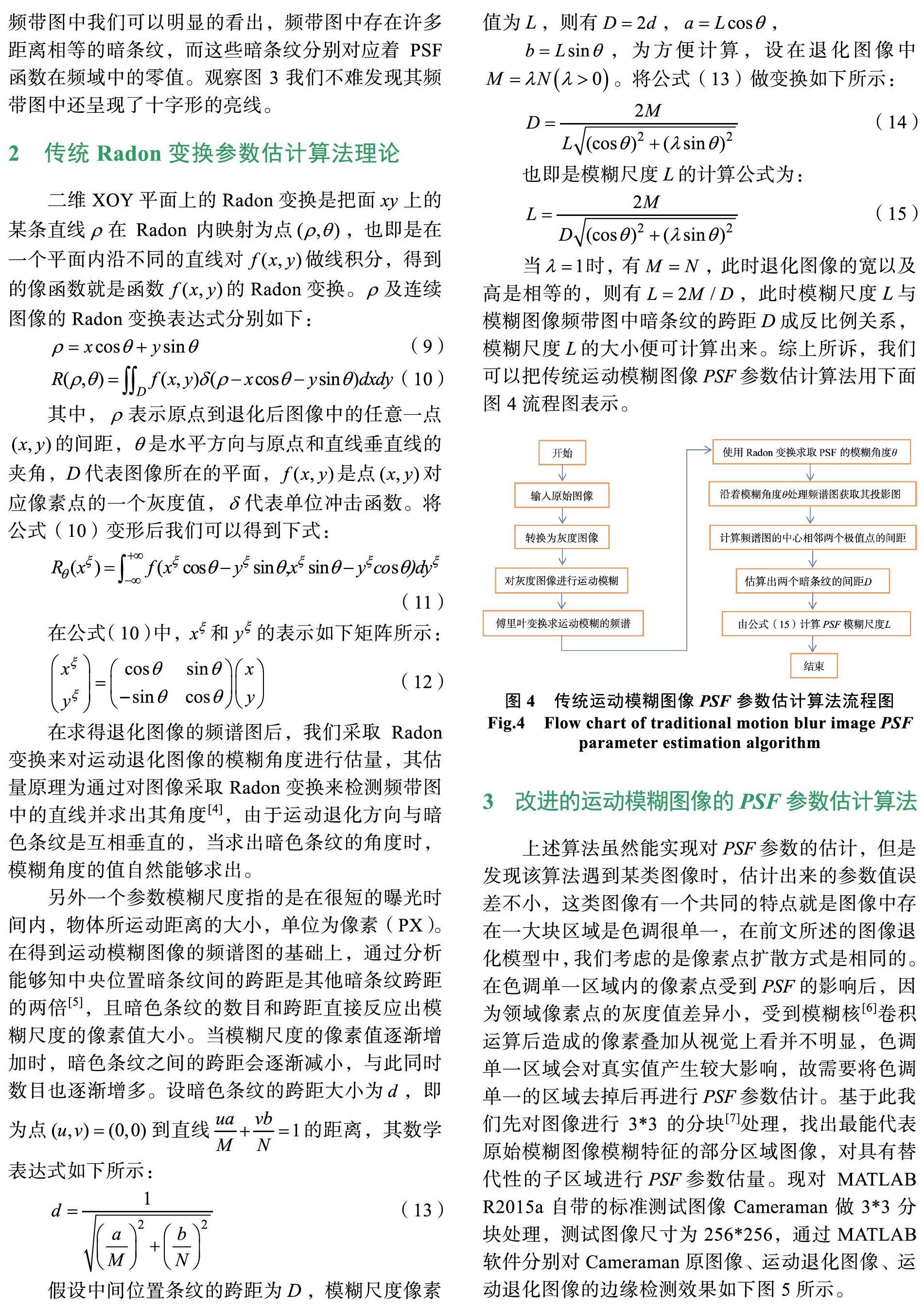
以上图1实验采用原始真彩色Lena图像的尺寸为512*512,环境为MATLAB R2015a。图2对Lena灰度图像人为添加模糊角度为15度,模糊尺度为20PX后使其退化。图3是Cameraman的退化图像和对应的频谱图像,其中Cameraman原始灰度图像的尺寸为256*256,模人为添加糊角度为45度,模糊尺度为10PX后使其退化。通过频谱图像我们可以发现频谱图中暗条纹与水平方向的夹角的角度与真实模糊角度的差接近90度,也即是说暗条纹的方向与模糊角度是可以近似当作是垂直的。在图2的频带图中我们可以明显的看出,频带图中存在许多距离相等的暗条纹,而这些暗条纹分别对应着PSF函数在频域中的零值。观察图3我们不难发现其频带图中还呈现了十字形的亮线。
2 传统Radon变换参数估计算法理论
3 改进的运动模糊图像的PSF参数估计算法
上述算法虽然能实现对 参数的估计,但是发现该算法遇到某类图像时,估计出来的参数值误差不小,这类图像有一个共同的特点就是图像中存在一大块区域是色调很单一,在前文所述的图像退化模型中,我们考虑的是像素点扩散方式是相同的。在色调单一区域内的像素点受到 的影响后,因为领域像素点的灰度值差异小,受到模糊核[6]卷积运算后造成的像素叠加从视觉上看并不明显,色调单一区域会对真实值产生较大影响,故需要将色调单一的区域去掉后再进行 参数估计。基于此我们先对图像进行3*3的分块[7]处理,找出最能代表原始模糊图像模糊特征的部分区域图像,对具有替代性的子区域进行 参数估量。现对MATLAB R2015a自带的标准测试图像Cameraman做3*3分块处理,测试图像尺寸为256*256,通过MATLAB软件分别对Cameraman原图像、运动退化图像、运动退化图像的边缘检测效果如下图5所示。
其中,对Cameraman原始图像手动添加的模糊尺度为15PX,模糊角度为15度后使其退化。本文使用Canny算子对模糊图像进行边缘检测,主要是因为Canny算子较其它几个算子不仅可以充分的识别出模糊图像的边沿信息,而且还能抑制噪声干扰[8]。同时,这会使后续检测更加精确。对Cameraman原始灰度图像做3*3分块处理效果如下图6所示。
我们将模糊图像分块处理后再对其边缘检测,找到对应边缘信息最多几个区域,原因是在边缘处的像素值灰度变换会比其它部分的像素值的灰度变更剧烈,然后像素叠加后在视觉上的模糊效果更明显,对这些区域进行 参数估计后的结果会更精准。为了减小某些运动退化图像频带中存在的十字亮线对模糊尺度估计的千扰,我们将模糊图像的频带图后做一次二值化[9]后的闭运算操作,最后对图像不同程度腐蚀。针对不同的模糊图像中心条纹的宽度不同,对进行閉运算后的图像先设置阈值[9]进行形态学腐蚀操作。先测中心条纹的宽与高,得到宽和高的值中小的那个值,设置阈值T,如果该值大于T则继续腐蚀,反之则对图像进行Radon变换求得模糊角度。
由于利用 Radon 变换直接求取模糊尺度[10]存在一定的缺点,当模糊图像中含有的噪声强度较大时,其频谱图的暗条纹会变得模糊不清。不利于估量这些暗条纹之间的间隔,且当模糊尺度比较小时,频带图经过阈值化后会呈现出长椭圆形状,导致在该方向上的 Radon 变换得到的投影图发生振荡,当模糊尺度比较大时,估算出来的结果产生的误差值较大。故使用微分法[11]来提高估计精度。
4.2 实验过程与数据处理
使用MATLAB R2015a软件读取上述四幅图像,按照图4传统模糊图像 参数估计算法求取模糊图像的模糊角度 和模糊尺度 。按照图11改进的运动模糊图像 参数估计算法(本文算法)求取模糊图像的模糊角度 和模糊尺度 ,当我们对上述四幅图像进行3*3分块处理后,统一选取4个小特征图像块,对该4个图像快进行模糊角度 估计得到四组数据,去掉四组数据中的最大值与最小值,将剩下的两组数据取平均值后作为最终的 参数估量值。
4.3 实验结果与分析
首先选取Cameraman、Lena两幅无噪测试图像,对两幅无噪图像手动添加模糊参数,再用本文 参数估计算法与传统 参数估计算法分别对人为模糊后的图像进行 参数的估量,其中,对Cameraman无噪图像模糊角度自15度起,以15度为间隔取6组角度值,模糊尺度自5PX起,每个5PX取6组像素值。对Lena无噪图像模糊角度自20度起,以20度为间隔取6组角度值,模糊尺度自15PX起,每个5PX取6组像素值。得出的数据如下表2、表3所示。
现在我们将Cameraman、Lena两幅测试图像手动添加均值为0,方差为0.005的高斯白噪声,使其成为含噪图像,再用本文 参数估计算法与传统 参数估计算法分别对人为模糊后的图像进行模糊参数的估量,其中,对Cameraman无噪图像的模糊角度自15度起,以15度为间隔取6组值,模糊尺度自5PX起,每个5PX取6组像素值。对Lena无噪图像模糊角度自20度起,以20度为间隔取6组角度值,模糊尺度自15PX起,每个5PX取6组像素值。得出的数据如下表4、表5所示。
通过这两组实验数据可以看出,无论是有噪声图像还是无噪声图像,总的来说本文算法在求模糊图像的 参数中的模糊角度与模糊尺度的问题上都要比传统 参数求解方法更加精确。对比表2与表4可以知道,当Cameraman图像的模糊尺度为25PX、30PX时并且含噪声时,本文算法估计效果较差。对比表3与表5可以看出,本文算法在估计运动模糊图像 参数时都更加精确些。
5 结论
本文在在原始模糊图像的 参数的求解中,结合了图像分块理论和一些形态学图像处理操作,并在MATLAB R2015a仿真软件上进行了实验,对实验结果进行分析表明该算法能提高运动模糊图像 参数估计的准确率。在下一步的学习过程中,我们可以充分考虑不同强度的高斯噪声以及其他类型的噪声对 参数估计的影响,并且继续研究运动模糊图像在某些特定模糊参数下出现的 参数估计精准性较差的问题。
参考文献
[1] 王玉全, 隋宗宾. 运动模糊图像复原算法综述[J]. 微型机与应用, 2014, 33(19): 54-57.
[2] 杨丹, 赵海滨, 龙哲, 等.MATLAB图像处理实例详解[M].北京: 清华大学出版社, 2013.
[3] 盛文正.运动模糊图像复原技术的研究[D]. 长沙: 长沙理工大学电气与信息工程学院, 2015.
[4] 吴海洋, 周仲礼, 曾凡霞, 等. 盲小波算法在遥感图像去噪中的应用[J]. 软件, 2012, 33(1): 9-11.
[5] J. Jeon, I. Yoon, and others, "Fully Digital Auto-Focusing System with Automatic Focusing Region Selection and PSF Estimation," IEEE Trans.on Consumer Electronics, Aug. 2015, PP. 1204-10.
[6] 张书豪. 单幅运动模糊图像复原技术的研究与实现[D].湘潭: 湘潭大学物理与光电工程学院, 2017.
[7] 陈俊杰, 鲁康. 基于直方图平移的图像二次分块可逆数据隐藏方法[J]. 软件, 2015, 36(7): 114-117.
[8] 曹妍, 陈伟, 徐森. 图像去噪方法研究与仿真[J]. 软件, 2015, 36(4): 33-36.
[9] 方奋奇, 边学军. 一种基于二值图像的信息隐藏技术. [J]. 软件, 2012,33(1):27-28
[10] Y T. Hwang, H R. Wen and B C. Tsai, “Efficient Block Adaptive Point Spread Function Estimation and Out-of-Focus Image Restoration Scheme,” in Proc. of IEEE ICCE-TW, 2015.
[11] 廖永忠, 蔡自兴, 何湘华. 基于点扩散函数参数辨识的运动模糊图像的盲恢复研究[J]. 光学技术, 2014, 40(3): 235-239.
[12] 郭璇, 郑菲, 赵若晗, 等. 基于阈值的医学图像分割技术的计算机模拟及应用[J]. 软件, 2018, 39(3): 12-15.
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
应用数学(2020年4期)2020-12-28
北京航空航天大学学报(2020年10期)2020-11-14
东华大学学报(自然科学版)(2018年1期)2018-06-29
统计与决策(2017年2期)2017-03-20
数学物理学报(2016年5期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
系统工程与电子技术(2016年2期)2016-04-16
河南科技(2014年6期)2014-02-27