
基于颗粒单向流动效应的手持式月壤取心装置设计
2020-08-12 06:20陈化智刘荣凯姜生元
深空探测学报 2020年2期
陈化智,刘荣凯,马 超,姜生元
(哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150001)
引 言
月球存在丰富的矿物资源和能源,若加以开发利用,可有效缓解未来全球性资源与能源的紧张态势[1-5]。通过对月壤样品进行分析,可以了解月球的地质构造及所蕴含的矿物元素信息,为合理开发和利用月球资源奠定基础。因此,宇航员在月面上获取具有原态层理信息的月壤剖面样品是载人登月任务中的重要工作之一。
在人类的探月史上,前苏联和美国分别以无人钻取和人工钻取、敲击贯入的方法成功获取到了月壤剖面样品[6-7]。根据返回的样品判断,钻取方式采集的样品其层理性较差,而美国“阿波罗”(Apollo)登月任务的宇航员通过敲击薄壁取心管获取的样品能基本保持原态层理信息[8]。然而,由于月壤的压缩性和颗粒形态的不规则性,取心管在贯入过程中将引起月壤颗粒之间挤密互锁、滑行困难,并增强了颗粒与管内外壁之间的接触应力,严重时会在管内形成“土塞”,即管内样品的长度达到极限,不会随着贯入深度的增加而增大。这将导致月壤在管内的填充率降低、取心管的贯入和拔出过程受阻[9]。由此可见,取心管界面处接触应力的增加是降低取心性能的主要原因。
降低取心管界面处接触应力最直接有效的方法是将该处的月壤颗粒排出到月面。通过引入非对称摩擦功能界面,能够在振动条件下实现颗粒的单向输送(流动)效果[10]。基于该原理,以低功耗、高层理品质为核心目标,本文提出了一种宇航员手持操作的月壤剖面样品采集装置的设计方案。利用离散单元法数值模拟软件EDEM针对其取心性能开展了仿真研究,为取心装置的优化设计提供支持。
1 基于颗粒单向流动效应的取心原理
如图1所示,在轴线方向上对取心管施加振幅为Ac、频率为fc的振动,则取心管在轴向压力及振动的耦合作用下逐渐潜入到月壤中。由于取心管内外壁具有非对称的摩擦[11]效应(依靠表面微结构实现),促使与之接触的月壤颗粒在非对称摩擦驱动力的作用下向上流动,最终被排出到月表并堆积在取心管附近,形成积屑域。因管壁附近的月壤(流动域)处于流动状态,其密实度将低于未受扰动的原态月壤,与管壁的接触应力也相应地有所降低,避免了管内土塞的形成。因而,采样阻力减小的同时,取心率(管内样品长度hsam与贯入深度hlim的比率)也得到了提高。
以取心管外侧流动域月壤为例,其在一个振动周期内的运动过程如图2所示。质量为Δms的流动域月壤颗粒集合微元(以下简称微元)在运动过程中受到自身重力Δmsg,上下表面月壤的挤压应力σz、σz+ dσz,侧壁的挤压应力σr以及与取心管壁、外侧月壤的摩擦力Fs1(或Fs2)、Fs3的综合作用。假设流动域月壤的密度为ρs,外边界半径为rb,横截面积为As、周长为ls,微元高度为dz,与取心管外壁的当量滑动摩擦系数为μ1、μ2,与原态月壤的当量滑动摩擦系数为μ3,建立力学平衡方程

图1 基于颗粒单向流动效应的取心物理模型Fig. 1 Sketch of coring based on particle directional flow method

图2 颗粒单向流动流程及力学模型Fig. 2 Process and mechanical model of particle directional flow

其中:j为1或2。将Δms=ρsAsdz,As=π(rb2-rc2),ls=π(rb+rc)代入式(1)中,整理可得

其中:Rs=1/(rb−rc)为取心管外侧流动域影响因子。式中“±”及“j”的选取根据微元与取心管的相对运动状态进行判定[12]。
当物体表面具有非对称的楔形微结构(微凸体)时,另一物体在其表面往复滑动时受到的切向阻力(当量摩擦力)是不相等的[13]。假设切向阻力与法向力满足经典库伦摩擦定律,则当量摩擦系数与微凸体倾斜角有如图3所示的关系。

图3 楔形微凸体及当量摩擦系数Fig. 3 Wedge-shaped asperity and equivalent friction coefficient
若当量摩擦系数取值合理,则颗粒可以发生逆重力方向的单向流动。颗粒的位移z随时间t(用周期数表示)的变化关系[12]如图4所示。

图4 颗粒单向流动位移曲线Fig. 4 Particle displacement in directional flow process
根据上述原理可知,影响颗粒单向流动性能的因素除非对称摩擦功能界面形貌参数之外,还涉及到取心管的振动参数。因此,为取心管提供振动的作动单元是取心装置的关键设计部分。
2 取心装置的设计概述
月球表面为高真空、低重力、大温差的苛刻环境,宇航员需要穿戴宇航服进行操控作业,在很大程度上影响了操作的灵活度和范围。因此,需要所设计的取心装置满足结构简单、操作方便的要求。取心管的振幅和频率均对颗粒的单向流动性能有较大影响,这需要激振驱动部件输出的振幅和频率能够解耦可调。此外,由于取心作业的目的是获取管内月壤样品并确保其层理信息,而不关注管外月壤的状态,故可考虑采用双管作业的方式:外层空心螺旋钻杆回转排屑,内层具有非对称摩擦功能界面的取心管振动取心。该方式一方面可以减小取心管的制作难度(仅处理内表面即可);另一方面若振动引起的颗粒单向流动性较差,外螺旋钻杆也仍然具有排屑功能,在一定程度上降低了取心阻力。
取心装置由激振驱动机构、回转驱动机构、封口机构、操控架、螺旋钻杆、取心管和控制单元组成,如图5所示。激振驱动机构与内层的取心管连接,而回转驱动机构与外层的螺旋钻杆连接,封口机构位于取心管和螺旋钻杆的末端。控制单元与取心装置本体通过线缆连接,实现相关信号的采集与控制。为满足振动参数解耦和调控方便的需求,选择电磁式激振器作为取心管的激振驱动源。

图5 取心装置的系统组成Fig. 5 Components of lunar regolith corer
激振器结构组成见图6,输出的振动频率和振幅由输入交变电流的频率和幅值决定,其关系如式(3)所示。其中:m为可动部件质量;B为磁场强度;L为线圈长度;I0为交变电流峰值;F0为激振力峰值;k与c分别为系统的等效弹簧刚度及阻尼。当其它系统参数给定时,激振器输出的振幅、频率及输入的电流峰值之间有图7所示的关系。由图7可直观地了解到,当输出振幅确定时,激振器的输入电流随着激振频率的升高而显著增加。因此,在选取激振器的型号时,要考虑其最大输入电流是否能满足取心管最大振幅及频率的设计要求。


图6 电磁式激振器的组成结构Fig. 6 Components of electromagnetic vibrator
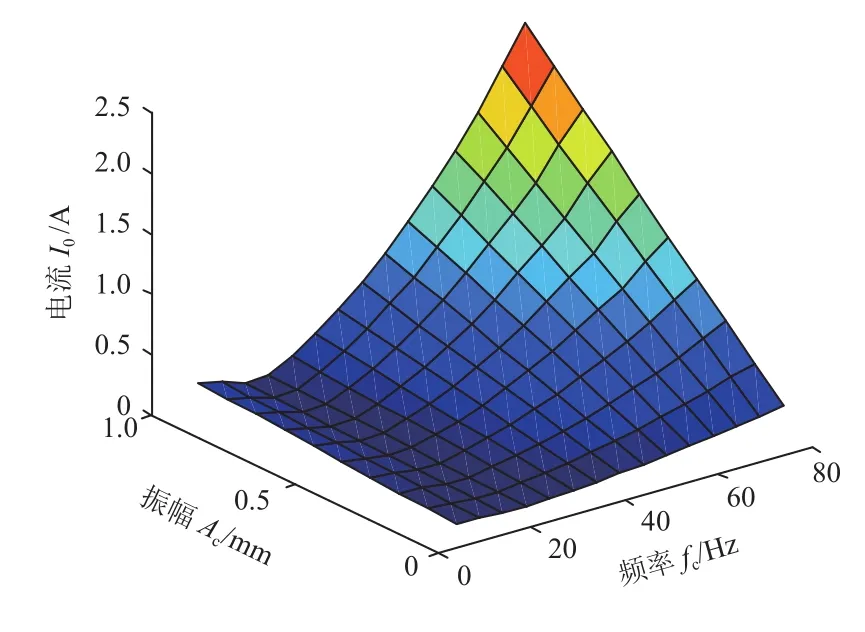
图7 激振器的输入−输出特性Fig. 7 Input and output characteristic of the vibrator
在取心作业过程中,宇航员手持操控架对取心装置施加一定的轴向压力,激振驱动机构为取心管提供激励,结合管内壁的非对称摩擦功能界面,将与管壁接触的月壤颗粒向上输送,中心部位的月壤即为所需的样品。与此同时,回转驱动机构驱使螺旋钻杆排屑,进一步降低取心阻力。取心管的振动参数及螺旋钻杆的转速由控制单元调控。获取到样品后,螺旋钻杆反向转动,使封口机构闭合,防止样品脱落。最后向上提拉出取心装置,拆卸取心管,完成取心作业。其中封口机构通过平面凸轮驱动多组叶片的旋转来控制取心管端口的开合,其组成及封口流程如图8所示。
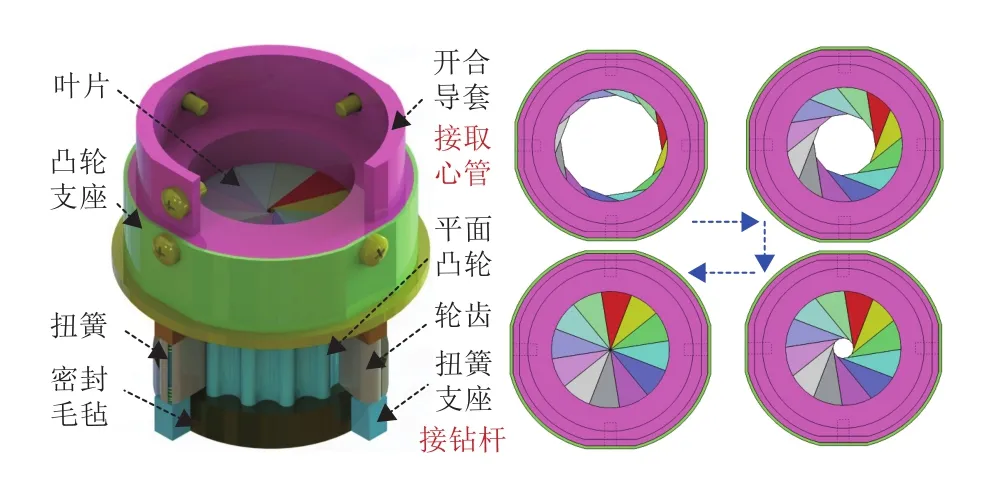
图8 封口机构及封口流程Fig. 8 Sealing mechanism and sealing procedure
凸轮支座及开合导套与取心管连接,无法产生回转运动。开合导套设计有与叶片相配合的导向槽,使叶片既可以绕导套轴线旋转,又能够沿径向滑动。平面凸轮安装于凸轮支座中,可以绕轴线旋转。轮齿与平面凸轮外轮廓啮合,其转轴为扭转弹簧。扭转弹簧安装于扭簧支座内,扭簧支座与螺旋钻杆连接。封口时,回转驱动电机驱动螺旋钻杆反向转动,通过扭簧和轮齿拨动平面凸轮旋转,从而使叶片封闭取心管端口,防止样品脱落。封口机构的底部安装有密封毛毡,避免月壤颗粒进入其中而引发故障。
取心装置的主要性能参数如表1所示。
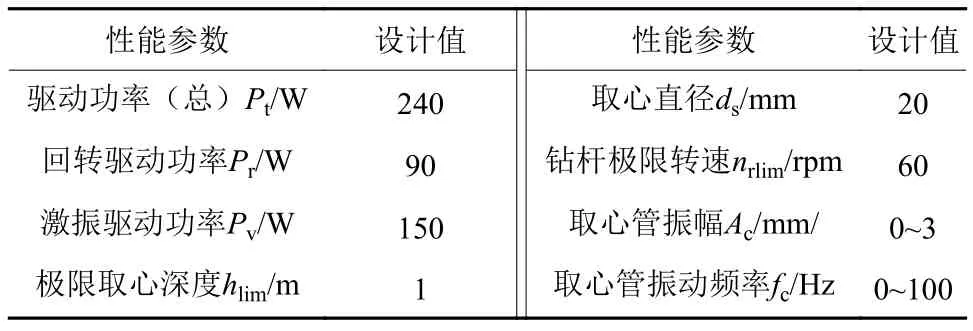
表1 取心装置的主要性能参数Table 1 Performance parameters of lunar regolith corer
取心管的振幅为空载状态下的数值,当取心管贯入月壤中时,振幅将会降低,具体振幅值可由加速度计测量。表1中的极限取心深度为取心管的设计长度,实际深度由工况决定。
3 取心性能仿真研究
本文利用离散单元法数值模拟软件EDEM对取心装置的采样性能进行研究。仿真中设置的月壤颗粒,其材料及细观力学参数已通过与三轴压缩试验结果的匹配验证[14]。颗粒粒径3 mm,数量1.5万个,仿真时间为10 s。螺旋钻杆及取心管的材料为7075铝合金,长度均为240 mm,结构与其他尺寸参数如图9所示。
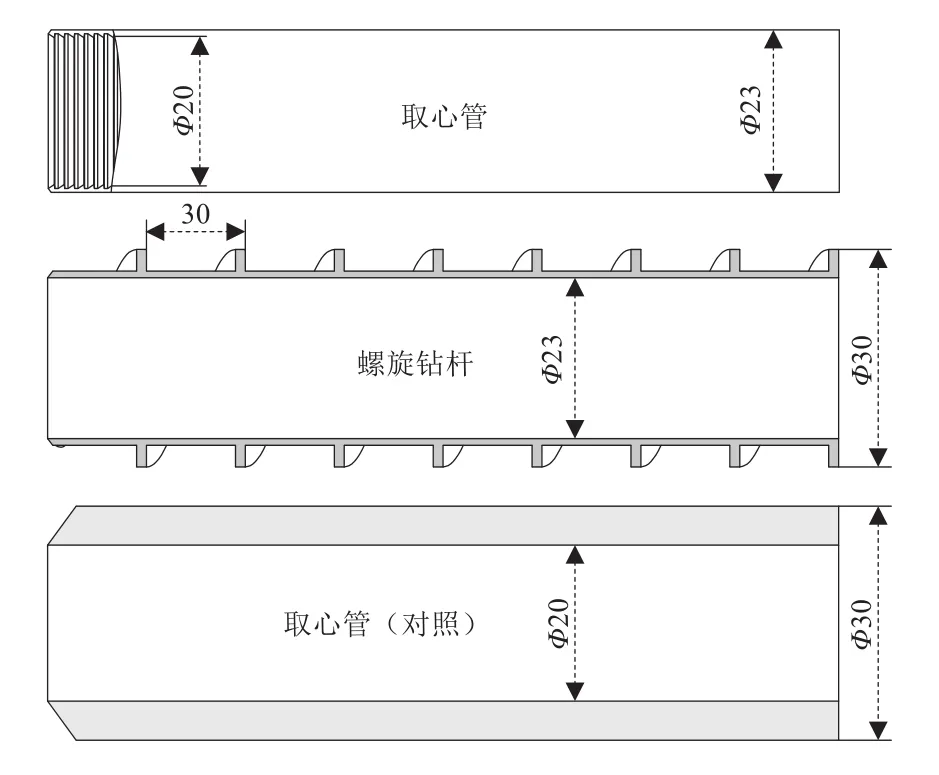
图9 螺旋钻杆与取心管的构型及尺寸Fig. 9 Spiral drilling pipe and coring pipe structures and size
取心管内表面的微凸体构型及尺寸如图10所示,单位为mm。

图10 微凸体的构型及尺寸Fig. 10 Wedge-shaped asperity structure and size
为体现该装置与传统静压贯入取心器在取心性能上的差异,另设表面无微凸体的取心管作为对照组。各管的运动参数见表2。

表2 螺旋钻杆与取心管的仿真运动参数Table 2 Spiral drilling pipe and coring pipe kinematics parameters in simulation
图11所示为仿真前后颗粒的分布状态。经测量可得,第1组仿真结束后的取心率为95.7%,第2组的为72.9%。可见,与传统静压贯入相比,采用回转与振动相结合的方式能获得更多的样品,且能保持一定的层理信息。

图11 仿真前后颗粒的分布状态Fig. 11 Particles distribution before simulation and after simulation
图12所示为取心过程中螺旋钻杆和取心管在轴线方向上(z向)受到的阻力。随着贯入深度的增加,阻力逐渐增大,在仿真结束时刻(t= 10 s),静压贯入受到的阻力约为回转振动的12倍。该结果表明,通过使管壁附近的颗粒向上运移,原位月壤颗粒对螺旋钻杆和取心管的阻碍作用大幅降低。两种取心方式的功耗变化如图13所示。虽然回转振动取心的轴向阻力远小于静压贯入式取心的阻力,但由于在轴向进给之外增加了回转运动和轴向振动,使得总功耗增大。这其中回转运动引起的功耗要大于轴向振动的功耗,如图14所示,在最后时刻二者相差10倍左右。

图12 轴向阻力与采样时间的关系Fig. 12 Relationship between axial resistance and time

图13 取心总功耗与时间的关系Fig. 13 Relationship between power consumption and time
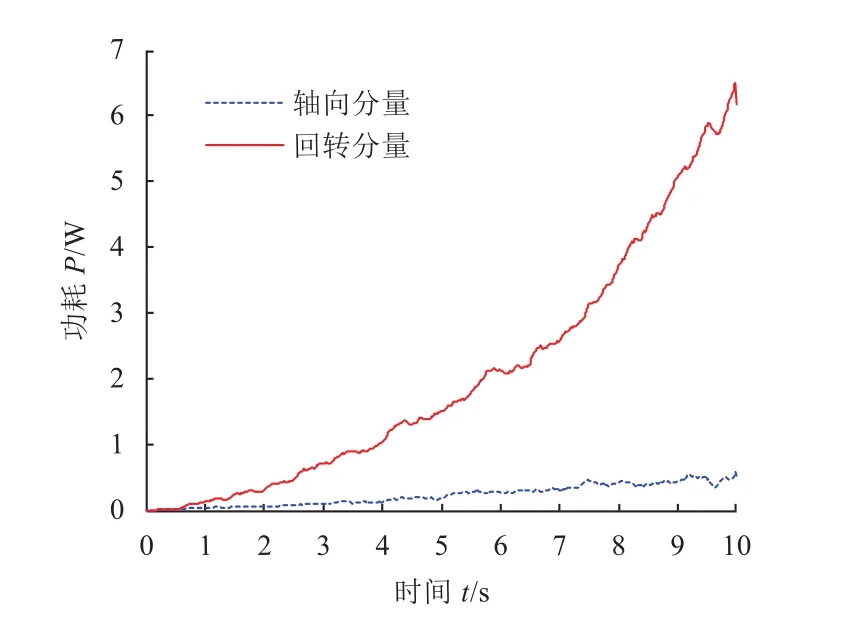
图14 取心功耗轴向分量与回转分量的变化Fig. 14 Relationship between axial component and rotary component of power consumption and time
由此可见,螺旋钻杆的回转运动会提高取心功耗,但在取心装置提供的动力范围内,为降低轴向压力(出于月面低重力环境的考虑)并提高取心率,应开启回转模式。此外,回转功耗与转速有密切关联,也可以通过改变螺旋钻杆的转速来适当降低。
4 结 论
本文以我国未来载人登月人工采样任务为背景,针对传统贯入式取心方式存在的贯入阻力大、取心率低等问题,提出了一种基于颗粒单向流动效应的解决方法。文中阐述了结合振动及非对称摩擦功能界面实现颗粒单向流动的基本原理。根据这一原理,提出了一种适合宇航员手持操作的取心装置设计方案,并对关键零部件的结构组成进行了详细说明。取心装置有回转及振动两种工作模式,以振动模式为主进行取心,回转模式用以辅助降低采样阻力及配合完成封口工作。
此外,利用离散单元法数值模拟软件EDEM针对取心装置的取心性能开展了仿真研究。仿真结果表明,在相同条件下与静压贯入的方式相比,取心率提高了22.8%,轴向阻力约降低为1/12,但总功耗增加1倍,其中回转运动为主要因素。因此,考虑到月面低重力环境,在取心装置所能提供的动力范围内,可适当开启回转模式。
在后续工作中,将针对取心管的表面形貌参数、振动参数以及螺旋钻杆的转速对取心性能的影响进行重点研究,为取心装置的优化设计提供支持。
猜你喜欢
军事文摘(2022年18期)2022-10-14
小哥白尼(趣味科学)(2022年6期)2022-08-17
纺织科学研究(2021年6期)2021-12-02
数学小灵通(1-2年级)(2021年9期)2021-10-12
青少年科技博览(中学版)(2021年11期)2021-03-07
北京航空航天大学学报(2020年10期)2020-11-14
阅读(书香天地)(2018年12期)2018-05-14
农村农业农民·B版(2017年11期)2017-12-06
BOSS食尚(2016年6期)2016-06-01
新闻前哨(2015年2期)2015-03-11
