
基于给定空间的Delta 并联机构尺度优化设计
2020-08-11 03:24张萌
科学技术创新 2020年22期
张萌
(辽宁装备制造职业技术学院 机械工程系,辽宁 沈阳110161)
Delta 机构是一种具有空间三平移自由度的并联机构,其最早由Clavel 博士于1985 年提出[1]。Delta 机构具有承载能力强、刚度大、自重负荷比小、动态性能好等优点,目前基于Delta 结构的并联机器人已广泛应用于食品、药品、电子产品等加工与装配中[2]。并联机构的工作空间及其构型一般由前期的任务规划确定,当并联机构的工作空间及其构型确定后,接下来的主要任务是确定其结构参数[3-4]。由并联机构的工作空间来确定其物理结构参数的过程叫机构尺度综合[5]。并联机构尺度综合的目标通常有:使并联机构的结构较小、使并联机构的灵巧性较好、在给定的刀具进给速度和进给加速度下,使驱动关节的速度和加速度较小、使驱动关节的驱动力较小、使机构的刚度较高等。
本文针对Delta 并联机构的结构特点,在机构运动学分析的基础上,以并联机构结构尺寸较小为优化目标,并由Delta 并联机构几何结构特点建立尺度综合目标函数及约束条件,最后由遗传算法寻优获取目标函数的最优解。仿真实验研究表明,该尺度综合优化方法能够保证在实现指定工作空间的前提下,Delta 并联机构的尺寸最小。
1 Delta 并联机构的约束方程
Delta 并联机构由两个等边三角形平台及3 条相同的支链组成,其结构如图1 所示,每条支链都由1 个定长杆和1 个平行四边形机构组成。
杆AiBi(i=1,2,3)与平台A1A2A3用转动副连接,四边形机构与平台C1C2C3及杆AiBi均以转动副连接,消除了动平台的3 个转动自由度而保留了3 个纯平动自由度。在定平台上建立坐标系Oxyz,O 为坐标原点同时也是定平台中心,x 轴指向OA1,y 轴垂直于平台表面向上,y 轴负方向指向动平台,在动平台中心建立动坐标系Px'y'z',坐标轴的指向与坐标系Oxyz 相同。Ai、Bi、Ci分别为各自转动副的中心,其中i=1,2,3。
设定平台与动平台的外接圆半径分别为r1和r2,杆AiBi长度为L2,平行四边形机构BiCi长度为L1,则定平台转动副中心点Ai及动平台Ci点在各自坐标系下的坐标分别为:

其中,βi表示OAi(或PCi)与x(或x')轴正向之间的夹角且βi=120°(i-1),i=1,2,3。设OAi与AiBi之间的转角为θi,动平台参考点P 在定坐标系Oxyz 中的坐标为(x,y,z)。则Bi在定坐标系中的位置矢量为
式中,li为杆AiBi方向的单位矢量。点Ci在定坐标系Oxyz中的位置矢量为

其中,R 为动平台相对于定平台的旋转变换矩阵,由于动平台相对于定平台仅能做平动,故R 为3×3 的单位矩阵。P 为动平台参考点在定平台中的坐标。
根据杆长约束条件BiCi=L1,建立机构约束方程

其中


图1 Delta 并联机构结构简图
2 机构尺度综合
尺度综合是并联机构运动学设计的最终目标,本文以并联机构结构尺寸较小为尺度综合目标,通过分析机构约束方程来建立优化目标函数及约束条件。
2.1 建立约束条件
将式(6)带入式(5)可得

式中,i=1,2,3,r 表示两平台之间外接圆半径之差。将(7)式展开并表示成

式(8)还可以表示为

其中

当且仅当满足下式时,式(9)有唯一解

将式(10)带入式(11)可得
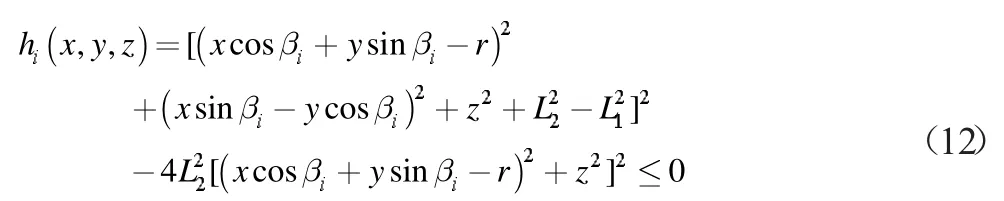
式(12)即为优化目标的约束条件,由式(12)可知,对于空间某一点P(x,y,z),如果点P 位于并联机构工作空间内,则有hi(P)<0;若点P 位于边界上,则有hi(P)=0;若点P 位于工作空间外,则有hi(P)>0。
2.2 建立目标函数
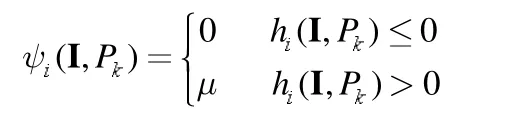
对于给定工作空间的Delta 并联机构的尺度优化问题,其优化的目标是实现给定工作空间的同时要求并联机构的尺寸参数最小。本文仅研究指定工作空间为立方体的Delta 并联机构尺度优化问题,指定的立方体如图2 所示,该立方体的空间位置由其上的八个顶点坐标确定。因此,该优化问题的数学模型可以表示为

其中,I 表示Delta 并联机构尺寸参数向量,且I=[L1,L2,r,D],D 为定平台与指定立方体之间的距离,Pk表示指定立方体的各顶点坐标(k=1,2,3,…,8),式(13)中的约束条件由式(12)确定。
由约束条件可知,hi=0 表示三维空间中的某一曲面,对于空间内任一点P(x,y,z),|hi(I,P)|表示点P 与曲面hi=0 之间的距离。若使指定的立方体包含于并联机构的工作空间内,只要保证立方体的八个顶点全部满足式(12)确定的约束条件。由于立方体的八个顶点坐标已知,只需在I 的可行解空间中搜索一点I*使得|hi(I,P)|取极小值,此时的I*即为Delta 并联机构的最优尺寸。由约束条件可以确定三个空间曲面,因此该问题的模型可改写为

对于式(14)所示的优化问题,可以通过罚函数法将其转换成无约束优化问题。设F1(I,Pk)为目标函数,则有

式中,N 表示指定工作空间中边界点的个数(本例中N=8)。定义惩罚函数为

其中
其中,μ 为无穷大正常数。因此,式(14)的模型可以改写为

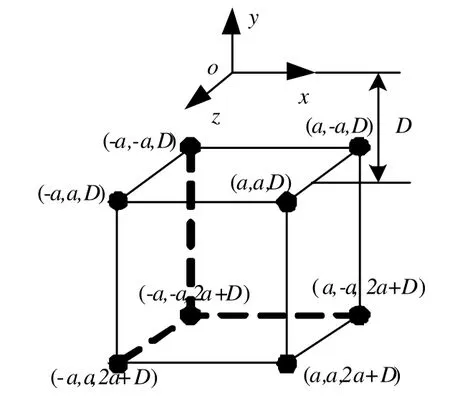
图2 指定工作空间的形状
2.3 目标函数最优值求解
遗传算法是借鉴生物界自然选择和群体进化机制而形成的一种全局寻优算法,其本质上是一种基于概率的随机搜索算法。遗传算法具有以下优点:通用性;并行性;简单性和可操作性;稳定性和全局性。本文中将使用遗传算法来求解目标函数的最优解,图3 所示为遗传算法的流程图。

图3 遗传算法流程图
2.4 尺度综合算例
本例中指定的立方体边长为2a=500mm,机构参数的变化范 围 为L1∈[100,1000],L2∈[100,1000],r ∈[20,200],D ∈[100,1000]。遗传算法的相关参数如表1 所示,在求解目标函数的最优解时,本文使用了MATLAB 软件中的遗传算法工具箱。由遗传算法寻优获得的Delta 机构尺度参数为:L1=577.66mm,L2=311.85mm,r=50.00mm,H=250.00mm。
图4a 和图4b 分别表示以立方体上下表面为截面的Delta机构工作空间截面俯视图。由图4a 可知,指定立方体上表面四个顶点均处于Delta 并联机构的工作空间中,而图4b 中指定立方体下表面左侧两顶点已处于Delta 并联机构的工作空间的边界上。因此,由遗传算法寻优获得的该组Delta 机构尺度参数,其工作空间中包含指定的立方体且Delta 机构的尺寸已达最小值。

表1 遗传算法相关参数
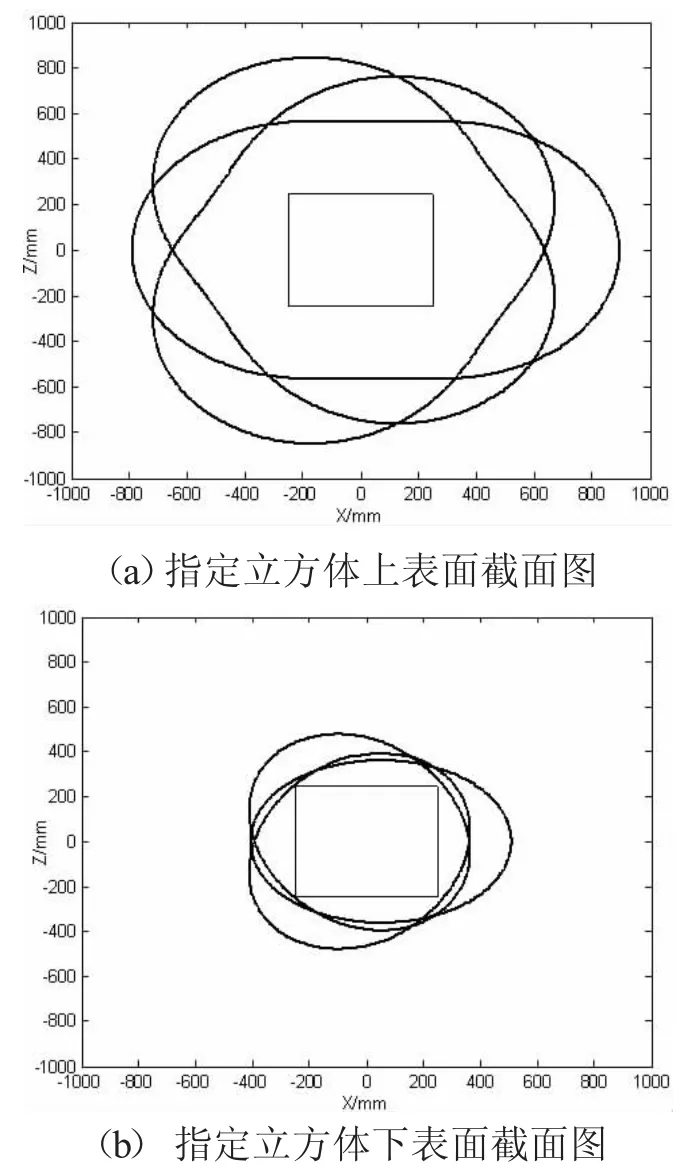
图4 给定工作空间上下表面截面图
3 结论
本文对指定工作空间的Delta 并联机构的尺度参数优化问题进行了研究,提出一种基于机构约束方程与指定工作空间边界点的并联机构尺度优化方法。在目标函数寻优过程中使用遗传算法,该算法对搜索空间和目标函数没有特殊要求,具有很好的鲁棒性和全局最优性。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
电子制作(2019年23期)2019-02-23
读者(2018年15期)2018-07-18
消费导刊(2018年8期)2018-05-25
中学生天地(A版)(2017年6期)2017-06-23
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年9期)2016-07-12
小学生导刊(低年级)(2016年6期)2016-07-02
中国市场(2016年12期)2016-05-17
燕山大学学报(2015年4期)2015-12-25
