基于FTA的齿轮转动元动作单元可靠性预计
2020-08-10 01:33:18葛红玉刘宝强杨满芝张传伟
河南工学院学报 2020年3期
葛红玉,刘宝强,王 拓,刘 园,杨满芝,张传伟
基于FTA的齿轮转动元动作单元可靠性预计
葛红玉,刘宝强,王 拓,刘 园,杨满芝,张传伟
(西安科技大学 机械工程学院,陕西 西安 710054)
考虑到结构复杂的机械产品可靠性,选取关键构成单元中的齿轮转动元动作单元对其进行了基于故障树分析(FTA)的可靠性预计。结合元动作单元定义建立了齿轮转动元动作单元的可靠性框图,从可靠性角度用框图描述齿轮转动元动作各单元之间导致系统失效的逻辑关系;对齿轮转动元动作单元的故障情形,运用故障树分析确定了故障原因的各种可能组合方式和其发生的概率,并给出了故障树模型;在齿轮转动元动作单元的故障树基础上结合可靠性框图进行了可靠性预计。可靠性预计结果表明:齿轮转动元动作单元的可靠度为0.908,还存在较大的提升空间。
元动作单元;可靠性框图;故障树分析
0 引言
可靠性预计是根据组成系统的元件、组件、分系统的可靠性来推测系统的可靠性,是对采用特定设计的产品最终可以达到的可靠性水平进行的定量预测。可靠性预计是可靠性设计过程中的重要工作之一。产品可靠性指标的保证,需要在产品的整个研制过程中采用可靠性预计方法,及时预测出产品可能达到的可靠性水平及存在的薄弱环节,有针对性地采取相关措施,以消除或减少产品故障的发生,提高其设计可靠性。国内外学者从不同角度对产品可靠性预计问题进行了研究:徐付伟[1]提出了基于元动作和相似理论的可靠性预计方法,以及数控机床可靠性的预计是自元动作单元开始逐次向上综合的过程。U. Bhardwaj[2]等针对风力发电机进行了详细的失效模式和效果分析,然后通过可靠性分析确定了失效的原因,并且提供了一种可靠性预计方法估计风力发电齿轮箱的总故障率。王冠峰[3]等在故障树基础上结合贝叶斯网络,采用了发动机系统可靠性模糊预计的方法,提出可靠性模糊预计在故障关联中的应用。O'Halloran[4]等针对早期设计中可靠性预测的不确定性,提出了早期设计可靠性预测方法(EDRPM)来计算函数和部件故障率分布。郭海宽[5]等运用故障树分析法(FTA)求解出设备冷却水系统的最小割集,应用Copula函数刻画最小割集内设备故障之间的失效相关性,以此建立设备冷却水系统的可靠度预计模型并进行定量计算。王庆礼[6]等针对机械系统载荷变化范围大的特点,利用相似产品的可靠性数据,同时结合手册对数控机床主轴系统设计方案进行可靠性预计,从而分析不同载荷下系统可靠度随时间变化的趋势。马纪明[7]等提出了一种基于浴盆曲线故障率函数无故障工作期(FFOP)的预计方法,并以某型无人机舵机为案例对方法的可用性进行了验证。Li.He[8]等基于多源信息融合提出了关于涡轮叶片失效可靠性预计方法。王加春[9]等利用相似机床CK5250、CK5263和TK6920的试验数据, 运用相似产品类比论证法,建立了工作台可靠性预计数学模型,对CXK5463加工中心的工作台进行了可靠性预计。针对高复杂度系统,王树清[10]等采用高效实用的ITEM ToolKi可靠性平台对其可靠性预计进行了研究。周真[11]等提出了基于BP神经网络的可靠性预计方法。
综上所述,国内外学者对不同机械产品提出了较多可靠性预计方法,而对于单一的机床元动作单元的可靠性预计研究较少。因此,本文选取机床上典型的齿轮转动元动作单元对其进行故障分析,建立故障树模型,并构造出可靠性框图,最后通过定量分析完成了齿轮转动元动作单元的可靠性预计。
1 齿轮转动元动作单元概述
1.1 元动作单元概念
针对结构复杂的数控机床,可经过由“谱系(Pedigree)-功能(Function)-运动(Motion)-动作(Action)”的 PFMA结构化分解至不能再分的动作层后得到结构相对独立,在机电产品工作过程中能够完成最基本的动作(移动或转动)以实现整机功能,可控可分析不需要也不可能再细分的动作单元[12]。针对两种基本动作,元动作单元包括移动单元和转动单元两种,移动单元有油缸活塞移动单元、齿条移动单元、螺母移动单元等,转动单元有齿轮转动单元、丝杠转动单元、主轴转动单元等。而结合产品结构分析建立的元动作单元称为元动作结构单元,主要用于设计过程;结合装配工艺分析建立的元动作单元称为元动作装配单元,主要用于装配过程。
1.2 齿轮转动元动作单元装配结构
开展齿轮转动元动作单元的可靠性预计研究的前提是建立齿轮转动元动作单元可靠性框图,而要建立相应的可靠性框图,分析齿轮转动元动作单元的装配结构是必不可少的一环。结合元动作单元定义,一般而言,元动作单元由动力源、中间件、紧固件、支撑件和执行件五大部分构成。图1为齿轮转动元动作单元的装配构成图。

图1 齿轮转动元动作单元装配构成图
2 元动作单元可靠性预计建模
2.1 元动作单元可靠性预计描述
可靠性预计是针对产品在其设计与研制阶段的系统可靠性进行的定量预测、估计方法,它基于产品可靠性结构模型,根据同类产品在研制过程及使用中所得到的失效数据和相关资料估计产品的可靠性。通过可靠性预计一方面能预测产品实际使用过程中所能达到的可靠性水平,另一方面还可找出影响产品可靠性的薄弱与不足之处,为改进设计方案提供有效依据,从而提升产品的可靠性。
可靠性预计是根据组成系统的元器件、零部件的可靠性来估计的,是一个自下而上、由局部到整体、从小到大的系统综合过程[13]。系统是由相互作用的若干单元(元件或子系统)组成的具有特定功能的有机整体。而元动作运动单元是将产品进行运动功能结构化分解之后得到的最小单元,是产品可靠性预计的开始。将元动作单元仅仅视为系统的一个组成单元是略显偏颇的,由于元动作单元可实现相应的目标动作,在结构上相对独立,故可将其视为一个独立的系统,对其进行可靠性预计的研究。
2.2 元动作单元可靠性模型
可靠性模型是从可靠性角度用框图来描述各单元及它们的组合如何导致系统失效的逻辑关系,通常又称为可靠性结构模式[14]。一个系统的可靠性不仅与组成系统的各个单元的可靠性有关,而且与系统的结构形式有十分密切的关系[15]。一个系统中的单元可能是串联、并联或混联的,元动作单元可靠性模型基于以下常用的三种模型进行描述。
在串联系统中,系统的所有单元必须全部工作,系统才会正常工作,任何一个单元发生故障都会导致系统故障。图2为串联系统模型的可靠性框图。

图2 串联系统模型可靠性框图
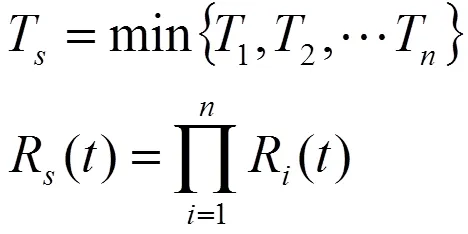
或者利用累积故障函数,即:

2.2.2 并联模型
在并联系统中,系统的所有单元都发生故障时,系统才会发生故障,相对应的并联系统模型如图3所示。

图3 并联系统模型可靠性框图
该模型对应的数学模型为:
次日黄昏,男子回来,神情憔悴。她什么也没说,在厨房里给孩子们做饭。吃完饭收拾餐桌和厨房。让他们洗澡。讲故事唱歌哄他们入睡。忙完一切。他没有像往常那样在客厅沙发上打开电视体育频道。她走进卧室,看见他躺在床上,空气中都是酒精的气味。他喝了烈酒,但还没有喝醉,也许只是想感觉舒服一些。


系统的可靠性函数为:

2.2.3 混合模型
在实际应用中,往往会出现串并联混联系统,混联模型可靠性框图如图4所示。
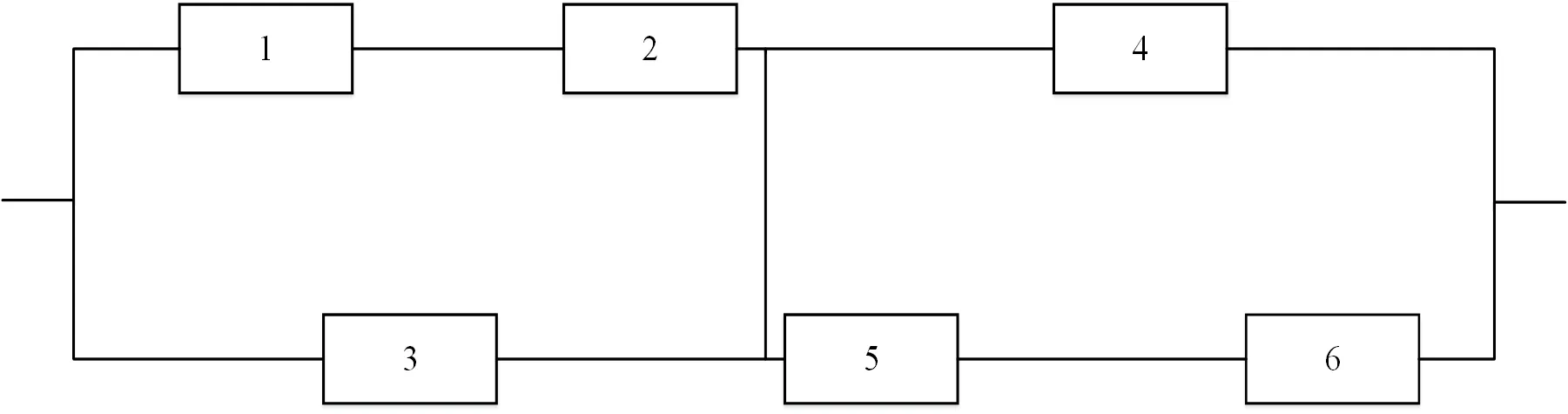
图4 混合模型可靠性框图
该模型对应的数学模型为:

3 基于故障树的齿轮转动元动作单元可靠性预计
3.1 齿轮转动元动作单元可靠性框图
如前所述,元动作单元由五大部分构成。为了保证元动作单元能够正常工作,这五部分构成缺一不可,元动作单元的可靠性框图如图5所示。

图5 元动作单元可靠性框图
可靠性框图是从可靠性角度出发研究系统与部件之间的逻辑图,是系统单元及其可靠性意义下连接关系的图形表达,表示单元的正常或失效状态对系统状态的影响。
可靠性框图依靠方框和连线的布置,绘制出系统的各个部分发生故障时对系统功能特性的影响。它只反映各个部件之间的串并联关系,与部件之间的顺序无关。图5所示的可靠性框图并不代表这些构成部分在元动作单元中的实际连接情形,仅代表只有每个组成部分都正常工作,才能确保元动作单元的正常运行。
3.2 齿轮转动元动作单元故障树分析与可靠性预计
根据FTA理论,依次确定顶事件、中间事件与底事件,参照功能流程与各逻辑门的性质逐级搭建故障树,齿轮转动元动作单元试验台的故障树如图6所示。
根据故障树最小割集的计算方法,得到图6所示故障树的最小割集为:{X1},{X2},{X3},{X4},{X5},{X6},{X7},{X8},{X9},{X10},{X11},{X12},{X13},{X14}。并且该故障树中仅存在或门关系,则故障树中的任一最小割集均可导致故障的发生。同时,在齿轮转动元动作单元的研究过程中,中间事件F1、F3的可靠性为1,即对应的下一级中间事件M4、M5、M6的可靠性为1,与之对应的底事件X1、X9、X10、X11的可靠性为1。故当中间事件F2、F4发生故障时,会导致顶事件发生故障,需要针对中间事件F2、F4进行独立分析。
根据上述初步分析的结果,得出齿轮转动元动作单元的主要故障部分为F2中间件故障及F4动力输出件故障,经过多次的仿真实验得出,当仿真次数大于5000次时,仿真结果趋于收敛,即主要故障部分所对应的底事件的故障次数逐渐趋于一致。主要故障部分所针对的各底事件的故障率如表1所示。
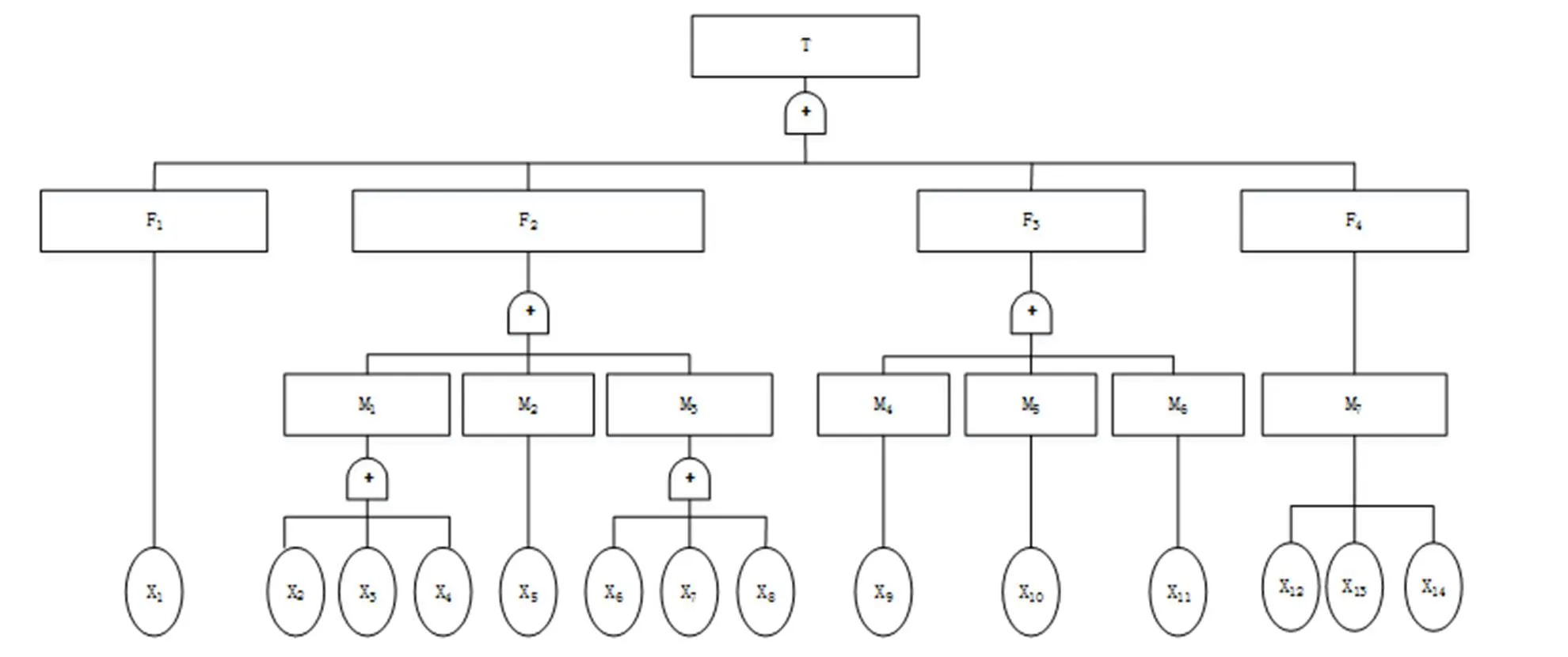
T.齿轮元动作单元失效 F1.动力输入件故障 F2.中间件故障 F3.紧固件故障 F4.动力输出件故障

表1 各底事件发生概率统计表
主要故障部分所针对的各底事件的重要度排序为:X12>X5>X4>X2>X3>X14>X13>X7>X6>X8。
从表1可以得出:齿面损伤的概率重要度在齿轮转动元动作单元故障原因中占比最高,其余故障行为所占的重要度各不相同,重要度的数据表明系统中各个零部件故障时对系统可靠性的影响程度,同时也指明了关于齿轮转动元动作单元合理分配维修资源的方向,从而保证维修成本降低和系统的正常运行。
由表1数据计算可得,顶事件的发生概率为:

4 结论
(1)本文采用故障树分析方法,研究分析了齿轮转动元动作单元的的可靠性,建立了齿轮元动作单元系统的故障树,并结合元动作单元结构划分,确定了齿轮转动元动作单元的可靠性框图。
(2)对齿轮转动元动作单元进行了可靠性预计,结果表明,齿轮转动元动作单元可靠度为0.908,略微偏低,并根据主要故障部分的各底事件重要度排序可得,齿轮转动元动作单元中齿面损伤应为整个系统单元的可靠性保障的关注点,提高齿轮转动元动作单元的可靠性需注意和保障齿轮齿面的工作状况。
(3)通过本文分析,可为元动作单元的可靠性研究提供理论与数据依据。
[1] 徐付伟.基于元动作单元的数控机床可靠性分配与预计研究[D].重庆:重庆大学,2017.
[2] BHARDWAJ U , TEIXEIRA A P , GUEDES SOARES C . Reliability prediction of an offshore wind turbine gearbox[J]. Renewable energy,2019,141(10):693-706.
[3] 王冠峰.基于故障树和贝叶斯网络的发动机可靠性预计[D].济南:山东大学,2017.
[4] BRYAN M, HOYLE C , TUMER I Y , et al. The early design reliability prediction method[J]. Research in engineering design, 2019,30(4):489-508.
[5] 郭海宽,赵新文,段孟强,等.基于最小割集的系统可靠性预计[J].四川兵工学报,2014,35(3):148-152.
[6] 王庆礼,高建民,陈琨,等.基于相似产品的车床高速主轴系统可靠性预计[J].机床与液压,2011,39(17):128-130.
[7] 马纪明,万蔚,曾声奎.基于浴盆曲线故障率函数的FFOP预计方法[J].航空学报,2012,33(9):1664-1670.
[8] LI H , HUANG H Z , LI Y F , et al. Physics of failure-based reliability prediction of turbine blades using multi-source information fusion[J]. Applied soft computing, 2018,72(11):624-635.
[9] 王加春,王学姚,刘清发,等.基于类比论证法的CXK5463加工中心工作台可靠性预计[J].机床与液压,2016,44(21):164-167.
[10] 王树清.高复杂度综合系统的可靠性预计[J].光机电信息,2011,28(3):47-51.
[11] 周真,侯长剑,王芳,等.基于BP神经网络的开关电源可靠性预计[J].电测与仪表,2009,46(1):64-68.
[12] 张根保,杨兴勇,李东英,等.元动作装配单元的故障维修决策[J].机械科学与技术,2016,35(5):722-728.
[13] 刘学航.数控机床的可靠性预计[J].科学与财富,2015(8):622-623.
[14] 周爱萍,王显会,宋子健.基于故障树分析法的大型特种车辆液压系统的可靠性仿真分析[J].机床与液压,2011,39(19):151-154.
[15] 韩福荣,苏秦,刘宇,等.现代质量管理学[M].北京:机械工业出版社,2012,6:264-267.
Reliability Prediction of the Gear Rotating Unit Based on FTA
GE Hong-yu, LIU Bao-qiang, WANG Tuo, LIU Yuan, YANG Man-zhi, ZHANG Chuan-wei
(School of Mechanical Engineering, Xi’an University of Science and Technology, Xi’an 10054, China)
Considering the reliability of mechanical products with complex structure, the action unit of gear rotation meta is selected to predict its reliability based on fault tree analysis (FTA).Firstly, the reliability block diagram of the action unit of the gear rotation meta is established based on the definition of the meta action unit;As for the fault situation of the action unit of the gear rotation meta, the fault tree analysis is used to determine the various possible combinations of the fault causes and the probability of their occurrence, and the fault tree model is given; based on the fault tree of the action unit of the gear rotation meta, the reliability prediction is carried out in combination with the reliability block diagram.The reliability prediction results show that the reliability of the action unit of the gear rotation meta is 0.908, and there is still a large lifting space. According to the event importance ranking at the bottom of fault tree, the basis for preventive maintenance and improvement design of system unit is provided.
meta action unit; reliability block diagram; fault tree analysis
TH16
A
2096–7772(2020)03–0001–06
2020-03-15
国家自然科学基金项目(51705417,51805428);陕西省自然科学基础研究计划项目(2019JQ-086);国家重点研发项目(2018YFB1703402)
葛红玉(1982―),女,河南安阳人,博士,主要从事智能制造装备可靠性方面的研究。
(责任编辑王 磊)
猜你喜欢
内燃机工程(2021年6期)2021-12-10 08:07:46
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
汽车维修技师(2019年7期)2020-01-16 04:33:04
上海质量(2019年8期)2019-11-16 08:47:46
汽车维修技师(2018年11期)2018-05-11 02:38:32
制造技术与机床(2017年3期)2017-06-23 08:11:52
电子制作(2017年2期)2017-05-17 03:55:06
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
电测与仪表(2015年6期)2015-04-09 12:01:18