
自动化监测技术在地铁基坑变形监测中的应用
2020-08-07 05:35张春节魏力王欢
价值工程 2020年22期
关键词:位移
张春节 魏力 王欢

摘要:在地铁车站基坑施工过程中,为了保障工程安全,采用自动化监测手段对基坑进行实时变形监测。本文介绍了自动化监测系统在沈阳市新建地铁九号线北二路车站基坑监测中的使用。从监测网布置、测量方法、监测结果分析几个方面较详细的说明了自动化监测方法在指导基坑施工进行的方法和过程,为相似工程的变形监测提供借鉴和参考。
Abstract: In the construction process of subway station foundation pits, in order to ensure the safety of the project, the real-time deformation monitoring of the foundation pits is carried out by using automatic monitoring methods. This article introduces the use of the automatic monitoring system in the foundation pit monitoring of the Beier Road Station of the new Metro Line 9 in Shenyang. From the aspects of monitoring network layout, measurement methods and analysis of monitoring results, the method and process of automatic monitoring method in guiding the construction of foundation pits are explained in detail, which provides reference for deformation monitoring of similar projects.
关键词:自动化监测;基坑施工;监测网布置;位移
Key words: automatic monitoring;foundation pit construction;monitoring network layout;displacement
中图分类号:U231.3 文献标识码:A 文章编号:1006-4311(2020)22-0216-02
0 引言
在地鐵车站深基坑施工过程中,要求对基坑的支护结构等进行系统和全面的监测,确保工程顺利进行。深基坑开挖过程中变形监测的作用主要是确保支护结构等受力部件的安全[1~2]。在施工过程中,通过对工程现场监测数据的分析,了解现场发生的变化,及时发现问题并采取措施,防止事故的发生。
目前基坑的变形监测主要采用常规人工测量的方法,该方法监测频率高、效率低、工作量大,且受基坑施工的限制,无法实现监测工作的实时化、全天候,对于地铁深基坑这样的周期长、频率高的监测项目来说,应用自动化监测系统进行变形监测可以极大地提高工作效率,掌握车站基坑变形信息的实时化[3~4]。本文以沈阳市地铁九号线北二路站基坑施工监测项目为例,介绍了项目自动化变形监测方法,分析了该自动化变形监测系统的精度,并对监测数据进行分析得出了变形结果。
1 工程概况
沈阳市九号线北二路站位于南北向兴华北街与东西向北二路交叉路口南侧,沿兴华北街南北向布置,与远期五号线换乘。车站为两层三跨的矩形框架结构,14m岛式站台,车站总长179.4m,主体结构采用装配式半铺盖法施工。车站东半幅盖挖,西半幅明挖,明、盖挖分界处设?准800钢管柱及?准1400混凝土桩基础作为临时路面的竖向支撑结构。
2 监测网布置
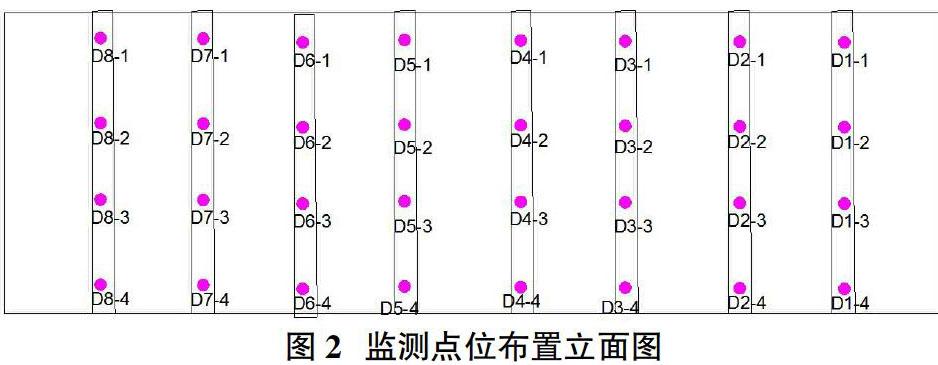
在兼顾全站仪的视场要求和检测要求基础上来布置监测网,布置前先进行点位估算,点位估算是通过全站仪的小视场功能实现的,稳固有效的基准点需离变形区80~120m远,如图1所示,可将布置在基坑四周100m处的4个点(JZ1、JZ2、JZ3、JZ4)作为基准点。在基坑西侧侧墙上均匀设置三个固定强制对中墩台作为监测站,在墩台上架设3台徕卡TS30全站仪。在基坑东侧明挖段竖向支撑结构上布设监测点,由南向北每一块底板称作一个仓,总共八个仓,每个仓中设置一个断面,总共布设8个断面(D1~D8),在混凝土支撑结构桩基础上由上至下均匀布设4个监测点(D1-1、D1-2、D1-3、D1-4)组成一个断面。各监测断面上监测点布设如图2所示。将固定的棱镜或反射贴片装配到每一个监测点和基准点,基坑施工不会受到各监测设备的干扰。采用自定义的空间直角坐标系(称为基坑坐标系),南北方向为X轴,东西方向为Y轴,铅垂方向为Z轴。假定JZ1坐标为(1000.000,1000.000,10.000)(单位:m),JZ1至JZ2的方位角为0°。
3 测量方法
徕卡TS30全站仪在自动化监测系统中观测时采用ATR模式[5],在每个周期观测前,测站点基坑坐标系下的坐标是根据测量4个基准点(JZ1~JZ4)4个测回推导出来的,而监测点的坐标是由前面的测量结果以及观测全部监测点得到的。观测模式、观测频率和观测时间等在监测系统中的设定是依靠基坑施工情况来进行的。最佳观测时间为夜间施工暂停时,一般观测1~2次,每次观测2测回;白天施工误差较大,一般观测2~4次,每次观测2测回,每周期大概需要15min的测量时间。重点部位可视基坑开挖深度的增加而相应增加其观测频率。观测中,当遇到遮挡目标或者结果超限等情况,系统会采取适当等待或者重新测量的措施。
自动化监测系统在测量同一周期内的基准点、工作基点及监测点的过程中,基准点和工作基点的测量数据会影响数据处理系统的稳定性,而数据处理系统会采取相应措施更新工作基点坐标,然后计算监测点三维坐标,最后应用编写的软件,生成客户需要的表格[6]。
4 监测结果分析
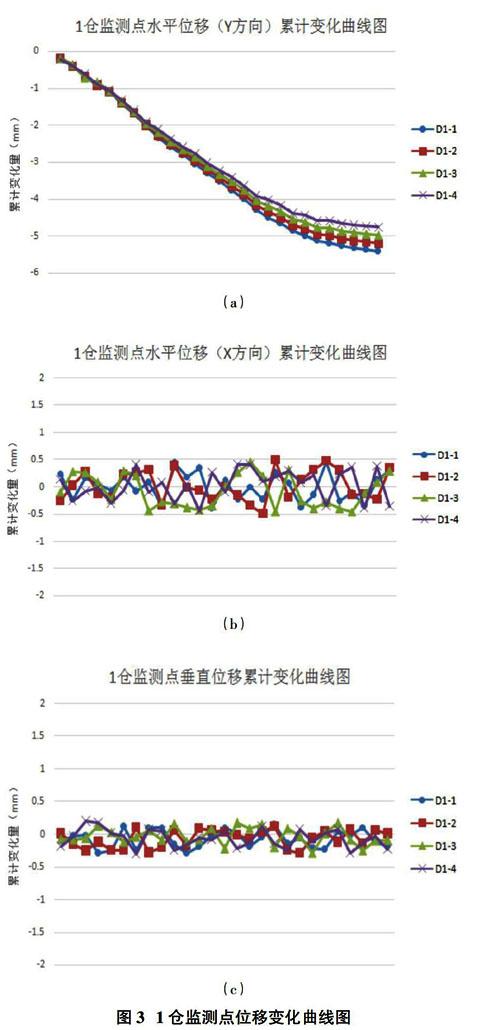
在分析系统中,每一个监测点任意时刻的本期位速率、本期位移量、累积位移速率、累积位移量、平均位移速率、平均位移量及最大点位位移等都可以被随时查看。如图3所示,基坑位移会根据其施工阶段的变化而变化。分析系统中的结果会清晰展现这个过程:以一仓为例,图3(a)中(“+”表示位移走向基坑方向,“-”表示位移离开基坑方向)。处于初始施工阶段的位移变化会比较明显,随着时间的推移车站主体结构完工,位移变化才趋于平缓。混凝土支撑结构水平位移向基坑方向变化明显,其中结构最上方的监测点D1-1位移最大,达到了-5.41mm,由上至下的监测点形变越来越小,由此说明支撑结构上方受力较大也最容易产生形变;从施工开始到施工结束,该断面位移量逐渐变缓,后期形变曲线接近于直线,说明随着施工结束,支撑结构逐渐达到稳定,工程施工安全达到要求。而图3(b)中(“+”表示向道路北方向位移,“-”表示向道路南方向位移),支撑结构水平位移(X方向)变化并不明显,位移量较小,整体形变量在±0.5mm之间,说明该支撑结构在其X方向受力并不明显。图3(c)中(“+”表示上升,“-”表示下沉),支撑结构垂直方向位移变化量更小,整体形变量在±0.3mm之间,通过分析认为结构上部受力主要来自地面交通的压力,在设计之初就已经通过计算确认,该结构承受良好,无明显位移。
根据项目监测控制指标,对于地铁基坑明、盖挖分界处竖向支撑结构垂直位移和水平位移,规定变形达到±3.3mm时会触发报警,達到±6.7mm时将采取一定措施,变形必须控制在±10mm以内。从系统曲线上看,沉降量最多不超过1.0mm,水平位移量最多不超过6mm,都符合要求。
5 结束语
随着测绘仪器及相关软件的发展以及地铁工程实时化的监测要求,自动化监测已经成为地铁基坑施工安全监测的发展方向。自动化监测系统以其强大的功能,能与徕卡TS30全站仪组成自动测量系统,实现了整个监测过程的全自动化。本文针对沈阳市地铁九号线车站基坑施工自动化监测实例,对地铁车站基坑的垂直位移和水平位移精度进行分析,并结合基坑施工状况对分析系统中的位移曲线图所反映的变化情况和趋势进行了分析。结果表明该自动化监测系统可以达到地铁基坑变形监测的精度要求,且受人为影响少,自动化程度高,真正实现了实时动态监测,监测结果也有效地指导了基坑施工,保证了车站基坑的安全,为今后类似工程的变形监测提供了参考。
参考文献:
[1]李桂华,黄腾,席广永,等.软土地铁隧道运营期沉降监控研究综述[J].河海大学学报:自然科学版,2011,39(3):277-284.
[2]钟金宁,段伟,田有良.应用TM30进行地铁隧道变形自动监测的研究[J].测绘通报,2011(7):85-88.
[3]曾贤敏,黄腾,李桂华.地铁隧道保护区变形监测信息管理系统设计与实现[J].测绘与空间地理信息,2015(1):107-110.
[4]储征伟,钟金宁,段伟,等.自动化三维高精度智能监测系统在地铁变形监测中的应用[J].东南大学学报(自然科学版),2013(2):225-229.
[5]潘国兵,李沁羽,张维.徕卡GeoMos自动监测系统在滑坡外部变形监测中的应用[J].测绘通报,2010(11):66-67.
作者简介:张春节(1978-),男,北京人,毕业于北京航空航天大学,研究方向为市政工程。
猜你喜欢
大陆桥视野·下(2017年1期)2017-03-09
东方教育(2016年4期)2016-12-14
建筑科学与工程学报(2016年3期)2016-06-14
科技与创新(2016年10期)2016-05-28
