
基于模糊神经网络的火灾自动报警研究
2020-08-07 08:12
福建质量管理 2020年14期
(武汉理工大学自动化学院 湖北 武汉 430070)
一、概述
火灾燃烧时温度、烟雾、CO都会发生明显变化,目前生活中火灾自动报警采用的火灾探测器都是单一类型的探测器,只对温度、烟雾、CO中的某一个特征量作为探测对象,且采用的火灾算法都是阈值法,当探测到的信息数据值超过设定的值时就会发出报警信号。在火灾发生初期,这些现象变化都不够明显,探测器往往会探测不到以至于错过最佳报警救援时机,造成更多的财产损失,而且在不同环境下,火灾燃烧时表现出的信息变化也不一样,所以单一的火灾探测器并不能有效的探测到所有火灾[1]。
二、信息收集
火灾发生时其燃烧原理一样,都伴随着热量、烟雾和气体的产生,将这些特征信息合并在一个探测器上检测,会使火灾发生前期判断时更加准确。复合探测就是将这些特征信号收集处理并综合分析的一种方式。单一的火灾探测器只有一个传感器,只监测温度或烟雾浓度或CO气体浓度并传达信号,多元复合探测器有多个传感器,可以同时检测多个特征信号[2]。一般性多元复合探测器只复合三种探测信息,太多会增加制造成本和难度,因此本文使用光电感烟探测、感温探测和CO气体探测三种探测方式进行火灾复合探测。
本文利用传感器检测技术,设计将感烟、感温、感CO三种传感器安装在一个火灾探测器中,能够对烟雾浓度、温度、CO气体浓度这三个特征信号同时进行探测,对监控现场进行实时检测。由于传感器输出的信号基本上为模拟信号,在传输过程中容易受到外界环境干扰,致使接收源接收到的不是最原始的信息,对信息的辨别产生比较大的影响,给火灾自动报警带来误报。
三、信息分析处理
式中,yi为经过归一化后的数值,xi为经过放大、滤波和A/D转换等处理后的数值。
(二)模糊推理。模糊控制将火灾发生时烟雾浓度、温度、CO浓度这三个信号分别模糊化为对应火灾而言的四种递进层次:无火、小火、中火、大火,为方便更加清楚直接的观察它们之间的关系,分别将这四种递进层次用字母A、B、C、D表示,温度为X、烟雾浓度为Y、CO浓度为Z,即X的大小可以分为A、B、C、D四种情况,Y、Z同理[4]。输入特征信号模糊化后,进入模糊逻辑推理,逻辑推理根据专家的经验知识来判断。在本模糊系统中,输入有三个特征信号,因此规则形式为:IF…AND…AND…THEN…,本系统有三个输入,每个输入有四个模糊子集,因此该系统有43条模糊规则。
模糊推理规则中,根据专家经验和实际情况判断火灾发生概率是一个模糊化过程,但是我们需要得到的是一个准确的结果,所以需要对输出信息进行反模糊化处理。这里我们将发生火灾概率为A、B的情况定义为无火灾发生,将发生火灾概率为C、D的情况定义为有火灾发生。“1”表示属于,“0”表示不属于。
通过MATLAB模糊推理工具箱,可以得到最终火灾发生的概率。
(三)人工神经网络仿真。本文根据实际输入输出情况,建立一个三层的BP神经网络模型。BP神经网络是一种按照误差逆向传播算法训练的多层前馈神经网络,在训练样本下进行训练学习,反复调整权值和阈值,直到误差达到设定的范围内[5]。
本文通过火灾数据样本对初始化的神经网络模型进行训练学习,最终得到训练结果,如图1所示。
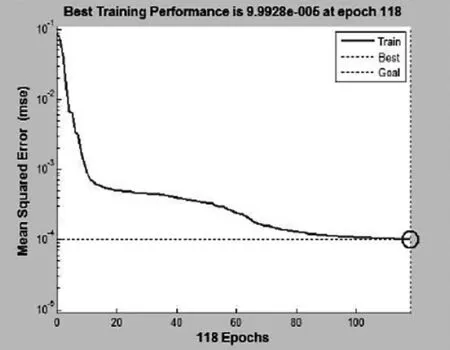
图1 神经网络训练结果
将3组检测数据输入到神经网络模型中,得到的实际输出与期望输出的对照发现实际输出和期望输出基本上相同,可以确定本文神经网络火灾自动报警系统能够准确预测火灾。
(四)决策层输出。由于样本数据不够庞大,不能够涵盖所有火灾的情况,神经网络的泛化能力有限,逻辑推理所用到的专家经验和知识不够完善,单一凭一种决策方法模糊控制系统或神经网络系统均不能够最大程度的降低火灾报警的误报率和漏报率,具有一定的局限性,因此本研究结合两种系统,采用决策层的推理系统,在神经网络的参照下,结合模糊控制系统,对火灾报警进行综合决策。本文采用如下策略对火灾进行最终判决:①当神经网络输出发生明火或者阴燃火的概率不小于0.6且模糊控制器输出发生火灾的概率不小于0.3,则认为发生火灾。②当神经网络输出发生无火的概率不小于0.7且模糊控制器输出发生火灾的概率小于0.3,则认为没有火灾发生。
通过三组数据测试,可以得出本文基于模糊神经网络火灾自动报警系统对火灾判断的准确性高、漏报率低。
四、结论
本文提出了基于模糊神经网络的火灾自动报警系统,相对于传统的单一特征信号探测报警,加入了模糊推理和神经网络算法。实验使用标准火灾数据作为样本,采用基于模糊神经网络的火灾自动报警运行,最终发现准确性高、漏报率低,相对于传统探测报警有所提升。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15
小学阅读指南·低年级版(2021年3期)2021-03-19
现代装饰(2020年7期)2020-07-27
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
华人时刊(2019年13期)2019-11-26
小学科学(2019年12期)2019-01-06
当代陕西(2017年12期)2018-01-19
商(2016年28期)2016-10-27
科学启蒙(2014年12期)2014-12-09
