基于变跟踪点的红外场景仿真原理及关键技术研究
2020-08-07 03:38山清
激光与红外 2020年7期
山 清
(中国空空导弹研究院,河南 洛阳 471009)
1 引 言
第四代红外成像制导空空导弹具备对抗复杂红外诱饵干扰及对目标关键要害部位进行精确打击的能力[1-2],要求红外成像导引头能够在复杂光电对抗条件下有效识别出飞机座舱、发动机等关键要害部位,所以导引头的跟踪点在导弹攻击弹道过程中在不断变化,越接近弹道末端导引头跟踪点变动越明显[3-4],以往普遍采用的基于固定跟踪点的红外场景仿真原理性误差将更加突出,会导致实际仿真产生的红外图像与应该呈现给导引头的图像在空间特征上存在巨大差异,无法真实考核导引头对目标要害部位的识别及跟踪性能,这就要求必需开展空空导弹变跟踪点红外场景仿真原理及关键技术研究。
从目前公开的文献看[5-8],变跟踪点红外场景仿真研究的方向重点集中在场景建模及渲染生成方面,研究成果停留在对场景生成过程的研究,并且对影响跟踪点动态仿真精度的误差分析及建模方面未见研究成果。同时,根据制导武器半实物仿真的原理,变跟踪点红外场景仿真在工程具体应用中仅仅考虑变跟踪点的场景生成过程是不够的[9-14],还必须对变跟踪点红外场景仿真的原理问题、视线模拟问题及影响变跟踪点场景仿真误因素的分析及建模等问题进行研究,这方面的研究目前仍是空白。因此,有必要建立完备的变跟踪点半实物仿真原理并对制约工程应用的关键技术进行研究。
2 固定跟踪点红外场景仿真问题分析
从红外场景仿真的动态生成过程来看,通过固定跟踪点红外场景仿真实时生成的红外场景的中心点是固定不变的,始终是预先人为指定的固定点,具体实现上通常选择制导中心(如:飞机的质心、飞机的尾喷口、飞机的座舱等特征部位)作为仿真场景生成的固定中心点,仿真视线与导引头光轴不重合,仿真原理如图1所示。
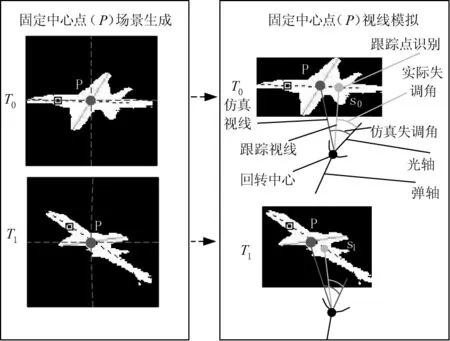
图1 固定跟踪点红外场景仿真原理示意图
由图1可知,该仿真方法的主要问题是存在失调角模拟误差,导致该误差的关键因素是变跟踪点红外场景生成误差和变跟踪点视线运动模拟误差,下面对这两类误差产生的原理进行分析。
2.1 场景生成误差对仿真失调角模拟的影响分析
固定跟踪点仿真场景生成误差主要由仿真场景生成所选择的透视投影视锥体导致。由于导引头探测系统实际工作过程是直接将三维空间场景通过透视投影转换成了二维图像;仿真过程中是通过建立基于固定跟踪点视线的场景仿真视锥体,然后将三维空间场景通过透视投影转换成二维图像,以此来等效代替了导引头探测系统的透视投影过程。
由于基于固定跟踪点的仿真视锥体与导引头视锥体同一时刻在空间上并不重合,因此视锥体空间指向的不一致导致了仿真产生的红外场景的空间特征误差,该仿真场景被导引头识别后导致了跟踪点识别误差,进而产生了失调角模拟误差。
2.2 视线模拟误差对仿真失调角模拟的影响分析
为了更直观地分析基于固定跟踪点建模技术在仿真视线模拟方面导致的仿真失调角模拟误差,假设固定跟踪点建模技术导致的仿真场景生成误差为零,则基于固定跟踪点仿真原理呈现给导引头的仿真场景空间特征误差完全由视线模拟误差决定。
由于导引头探测系统实际工作过程产生的二维图像的跟踪点过导引头光轴且像面与光轴垂直,而基于固定跟踪点的视线模拟方法投射出的二维仿真场景的跟踪点不一定垂直导引头光轴且无法保证像面与导引头光轴垂直。因此,该仿真场景被导引头识别后同样会导致导引头跟踪点的识别误差,进而产生了失调角模拟误差。
3 变跟踪点红外场景仿真原理研究
3.1 变跟踪点红外场景仿真特征分析
基于前面对固定跟踪点红外场景仿真原理的分析,提出基于变跟踪点的红外场景仿真特征如下:
1)从仿真场景的生成过程来看,仿真过程中实时生成的红外场景的中心点是动态变化的,场景的中心点为导引头光轴指向的透视投影点,因此仿真场景的中心点随导引头光轴指向的变化而动态调整;
2)从仿真场景空间关系模拟过程来看,仿真过程中将导引头光轴的惯性空间指向作为仿真视线,以此来建立视线驱动模型,仿真视线运动模拟的是仿真场景中动态变化的中心点相对导弹质心连线的运动情况;
3)从仿真结果脱靶量计算方式来看,仿真脱靶量以导弹质心相对目标上理想攻击部位的距离来衡量,导引头能否有效识别并跟踪目标上的理想攻击部位,对仿真结果脱靶量有重要影响;
4)从仿真的逼真度来看,能够有效考核导引头跟踪点的识别算法,并能够从原理上避免固定中心点仿真原理带来的失调角模拟误差。
3.2 变跟踪点红外场景仿真原理设计
建立基于变跟踪点的红外场景仿真原理,具体如图2所示。
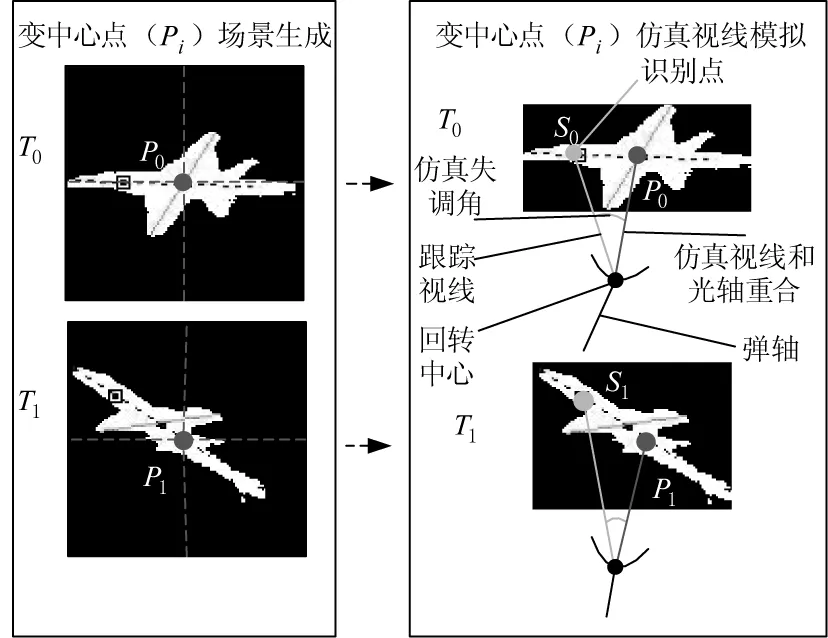
图2 变跟踪点红外场景仿真原理示意图
由图2可知:
1)场景中心点动态变化(Pi)
仿真过程中根据战情数据(主要包括:导引头光轴指向、目标位置、目标姿态、导弹位置、导弹姿态信息等)的更新情况实时生成基于变定中心点Pi(0≤i≤n)的仿真场景时间序列T0,T1,T2,…,Tn。从生成的仿真场景序列可以看出,在全部场景序列中场景的中心点是动态变化的,任何一帧场景的中心均为导引头光轴的透视投影点。
2)仿真视线与导引头光轴重合
仿真过程中根据战情数据(主要包括:导引头光轴指向、目标位置、目标姿态、导弹位置、导弹姿态信息等)的更新情况实时构建基于变中心点Pi(0≤i≤n)的理论仿真失调角时间序列T0,T1,T2,…,Tn。从构建的理论仿真失调角序列可以看出,在全部的仿真失调角序列中均是基于变中心点Pi的仿真视线指向和基于导引头光轴指向构建的,任何一帧的仿真视线均为动态变化的中心点Pi相对导弹的位置,即仿真视线过仿真生成的二维场景的中心且与相面垂直。
3)基于跟踪点识别情况产生实际失调角
导引头通过图像识别算法将场景中的Si(0≤i≤n)点作为跟踪点,并输出基于Si(0≤i≤n)点的实际失调角序列。
3.3 变跟踪点场景仿真消除失调角模拟误差的原理分析
根据上述建立的基于变跟踪点的红外场景仿真原理可以看出,在原理上不存在因仿真场景生成误差和视线模拟误差导致的失调角模拟误差,下面对该原理设计消除固定跟踪点红外场景仿真原理误差的机理进行分析如下:
1)基于变跟踪点的红外场景仿真原理在设计上由于采用了与导引头完全一致的视锥体,所以仿真视锥体与导引头视锥体同一时刻在空间上完全重合,因此由空间三维场景向二维平面图像的转换模拟过程不存在仿真相似原理误差,进而仿真生成的场景不会对导引头跟踪点的识别产生输入性的附加误差,这是变跟踪点红外场景仿真原理消除了固定中心点仿真原理失调角模拟误差的一个原因;
2)基于变跟踪点的仿真视线模拟原理在仿真过程中投射出的二维仿真场景的中心点与位标器回转中心连线时刻与导引头光轴重合,且投射的仿真二维像面与导引头光轴时刻垂直,因此基于变跟踪点的仿真视线模拟过程在实现空间相对关系的模拟实现上不存在仿真相似原理误差,这是变跟踪点红外场景仿真原理消除了固定中心点仿真原理失调角模拟误差的另外一个原因。
4 变跟踪点场仿真工程实现关键技术研究
由基于变跟踪点的红外场景仿真原理可知,导引头框架角在基于变跟踪点的红外场景仿真应用过程中是一个非常关键的建模输入物理量。因此,研究框架角对变跟踪点场景仿真的影响有重要意义。下面分别对框架角测量误差对变跟踪点场景生成过程和变跟踪点视线运动模拟过程的影响进行建模分析。
4.1 框架角对变跟踪点场景生成过程影响建模
框架角的测量误差直接影响红外场景仿真摄像机光轴的空间指向,从而产生摄像机空间指向误差。这一误差直接影响到变跟踪点红外场景仿真视锥体的裁剪空间,所以最终会产生变跟踪点仿真输出图像像素点覆盖的区域误差和像素点空间位置误差,这是影响变跟踪点场景仿真工程实现的一个关键点。
假设红外场景仿真视口平面为红外场景仿真物理辐射器件所在平面,本文以电阻阵列芯片为例进行建模。假设电阻阵列芯片由256×256个电阻阵列基本像素单元组成,每个像素单元等效为一个理想的点,像素点间距为d,各像素点在视口坐标系中的索引如图3所示。

图3 变跟踪点场景仿真视口平面示意图
根据图3可知,仿真场景视锥体投影面的宽度和高度分别为:
W=255×d
(1)
H=255×d
(2)
令场景仿真视口平面内每个像素点p的坐标为p(xi,yj),则有:
(3)
假设视口平面到视点距离为F,观察坐标系的坐标轴和视口平面坐标系坐标轴平行,且观察坐标系的z坐标轴过视口平面的中心,在无摄像机空间指向误差条件下的相对关系如图4所示。
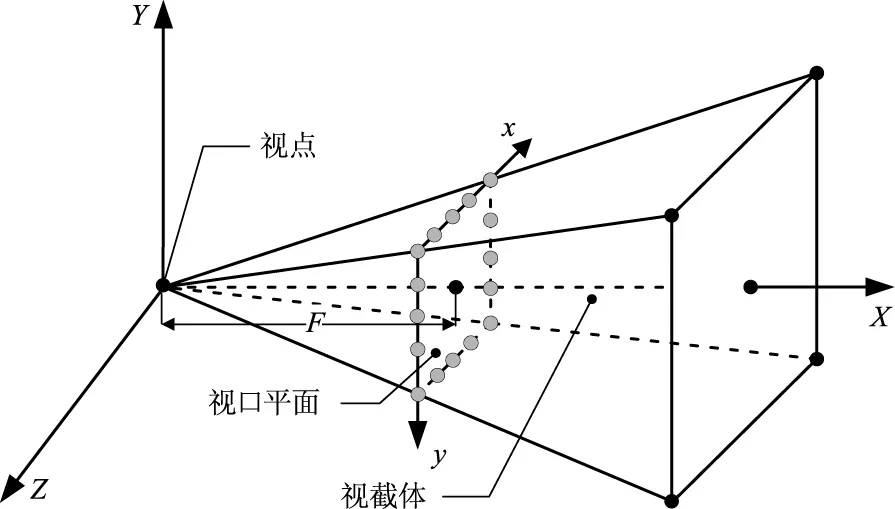
图4 视口平面和观察坐标系关系示意图
根据图4,可以计算出无摄像机空间指向误差条件下理论视口平面内各像素坐标点在理论观察坐标系中的坐标为:
(4)

(5)
由于导引头框架角测量误差的存在导致了摄像机的空间指向误差。为了研究摄像机空间指向误差对仿真图像像素点空间位置误差影响的数学模型,需要建立实际观察坐标系和理论观察坐标系间的相对空间关系。设实际观察坐标系B相对理论观察坐标系C的坐标变换矩阵为A,则:
(6)
上式中:
(7)
根据式(7)可得理论裁剪空间内的点在实际观察坐标系下的投影线方程为:
(8)
由式(8)可以计算出理论裁剪空间内的点在实际视口平面上的投影坐标zci、ycj为:
(9)
为了定量衡量框架角测量误差导致的仿真图像像素点空间位置误差,选择同一空间点在理论视口平面和实际视口平面内投影的位置距离ERij作为误差衡量尺度:
(10)
4.2 框架角对变跟踪点视线模拟过程影响建模
导引头框架角数据是变跟踪点视线运动模拟建模的重要输入。在基于变跟踪点的红外场景仿真过程中,视线运动指令的误差间接导致了仿真系统呈现给导引头的图像出现旋转,从而导致了仿真过程中呈现给导引头的图像与导引头在实际飞行过程中能够探测到的真实红外图像间的像素点存在空间位置上的不一致。
设理论光轴坐标系相对弹体坐标系的坐标变换矩阵为W,则:
W=Wy(GF)Wz(GW)
(11)
上式中:
设弹体坐标系相对仿真惯性坐标系的坐标变换矩阵为P,则:
P=Px(γ)Pz(ϑ)Py(φ)
(12)
上式中:
由式(11)和式(12)得理论光轴坐标系相对仿真惯性坐标系的坐标变换矩阵M为:
M=WP
(13)
(14)
上式中:

(15)
(16)
将式(13)和式(15)代入式(16)得:
(17)
由式(17)可得实际仿真光轴坐标系相对理论光轴坐标系的坐标变换矩阵Δ为:
(18)
下面根据Δ计算视线运动指令误差导致的仿真图像各像素点的空间几何位置偏差。设仿真图像像素点在理论光轴坐标系中的坐标为zsi、ysj,则由式(1)~(3)得:
(19)
(20)
为了衡量视线运动指令计算误差导致的仿真图像像素点几何位置误差,选择仿真图像像素点在实际仿真光轴坐标系和理论光轴坐标系中相应像素的距离d_ERij来衡量,令:
(21)
5 仿真分析
为了分析导引头框架角对变跟踪点场景生及变跟踪点视线运动模拟过程中导致的图像像素空间误差特性,基于上述建立的仿真模型,随机选取一组典型仿真输入参数进行仿真,仿真参数如表1所示。
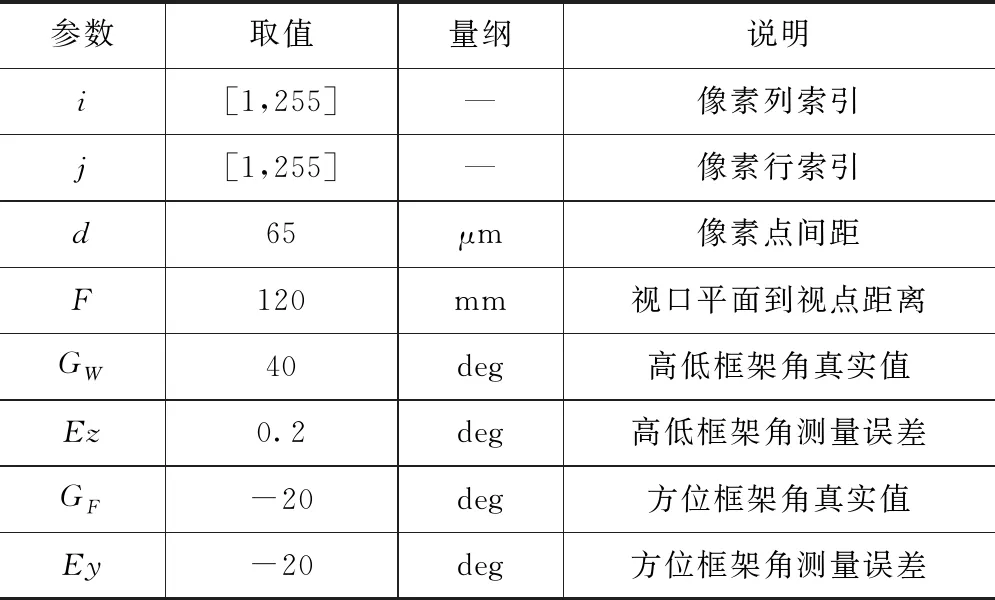
表1 仿真输出参数
导引头框架角误差对变跟踪点场景生成过程像素点位置误差影响的仿真结果如图5所示,像素点空间位置误差最大值为0.55 mm,且绝大部分像素点的位置误差也在0.5 mm左右,折合成像素大约7.7个像素点误差。
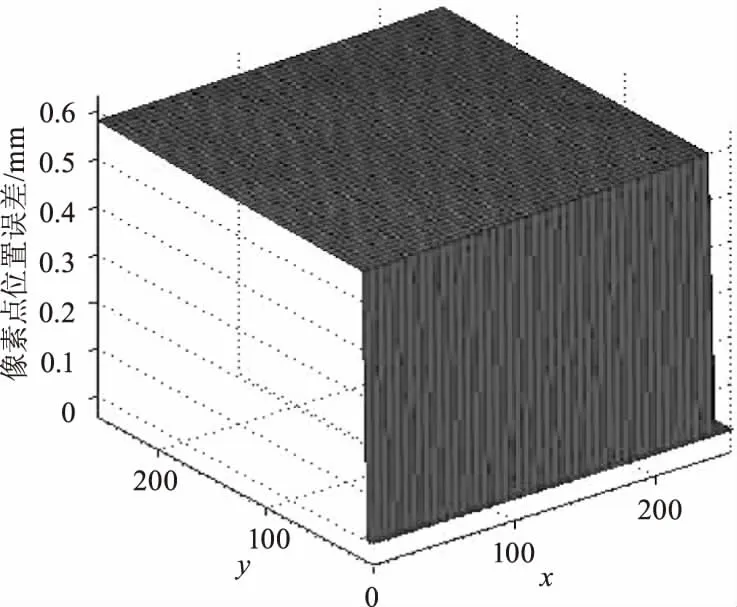
图5 导引头框架角误差对像素点位置误差的影响
导引头框架角误差直接导致了变跟踪点场景视线运动模拟误差,图6是变跟踪点视线运动模拟误差对图像像素点位置误差影响的仿真结果。从图6可以看出,图像四个顶角区域的像素点位置误差最大,向中心递减,最大误差为0.025 mm,折合成像素不到1个像素点,误差相对较小。
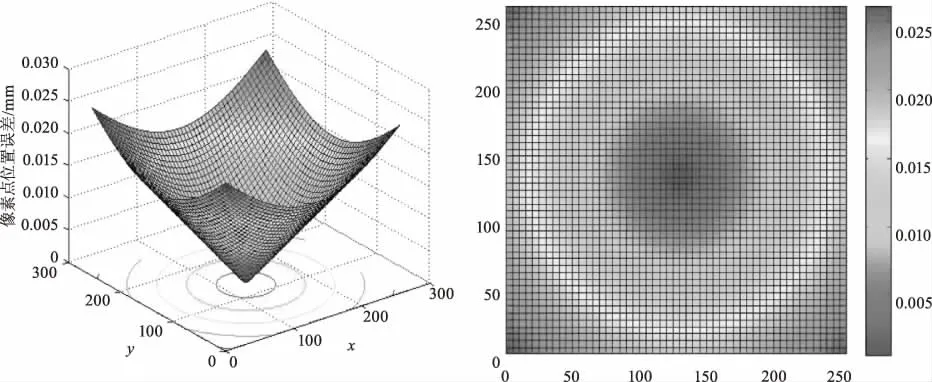
图6 视线运动模拟误差对像素点位置误差的影响
从仿真结果可以看出,变跟踪点仿真图像空间特征误差对摄像机空间指向误差敏感,对变跟踪点视线运动模拟误差不敏感。本文提出的变跟踪点红外场景仿真原理中引入的导引头框架角对变跟踪点红外图像的空间特征仿真精度有重要影响,因而在具体工程应用中应严格控制框架角测量误差。
6 结 论
本文针对基于固定跟踪点红外场景仿真存在的问题进行了深入分析,然后重点在此基础上提出了基于变跟踪点的红外场景仿真原理,并对影响变跟踪点红外场景仿真工程应用的关键误差因素进行建模及定量仿真分析,进而指出了变跟踪点红外场景仿真误差的敏感因素,可为变跟踪点红外场景仿真工程化应用提供技术参考。
猜你喜欢
摄影之友(2020年12期)2020-12-23
计算机技术与发展(2020年8期)2020-08-12
电脑报(2020年12期)2020-06-30
电脑报(2019年4期)2019-09-10
电脑爱好者(2018年17期)2018-11-05
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06
大众摄影(2015年9期)2015-09-06
弹箭与制导学报(2015年1期)2015-03-11
弹箭与制导学报(2015年1期)2015-03-11