基于北斗的多星座联合定位方法在电力工程中的应用
2020-08-06 13:18
电力勘测设计 2020年7期
(中国电力工程顾问集团中南电力设计院有限公司,湖北 武汉 430071)
0 引言
在电力工程测量中,特别是输电线路勘测中,GNSS实时动态(real - time kinematic,RTK)测量技术的应用越来越广泛[1]。而现在的GNSS-RTK定位技术还是主要依靠基于传统单一的全球定位系统(global positioning system,GPS),即GPS-RTK[2],由于卫星的定位技术,系统的可用性、定位结果的可靠性和精度在很大程度上取决于观测到的卫星的数量和卫星分布情况,立即寻址初始化至少需要5颗以上的卫星,而且卫星还得分布良好[3]。在一些特殊的复杂环境下,如山区林木密集区域,单系统的可见卫星数量往往是不够的,导致无法获得GNSS固定解,定位作业效率较低,无法满足高效测量定位作业要求[4],因此不同卫星导航系统组合应用是提高卫星定位可用率和可靠性的一个可行办法[5]。研究表明,不同卫星系统组合应用,可以采用更多的卫星资源以改善系统可用性、可靠性和定位精度[6],特别适用于复杂区域的电力工程测量作业。
1 多星座系统联合定位方法权比研究
GNSS定位需建立函数模型与随机模型,其随机模型一般基于卫星高度角等信号质量指标建立。多星座组合时,需要对不同类观测值确定先验权比,才能充分发挥组合系统的性能优势[7]。尤其是GPS & BDS组合定位时,需要对两类观测值确定先验权比,合理的权比才能充分反映冗余观测值的质量,提高导航定位和授时(positioning navigation and timing,PNT)服务的精度与可靠性[8]。
1.1 三星残差分析
采用两台徕卡GNSS接收机(Leica GS14)在湖北某建筑物屋顶采集多星多频超短基线资料(GPS:L1+L2;BDS:B1+B2),采样间隔设定为1 s,截止高度角为10°,基线长度约0.74 m。由于采用静态数据采集模式,高采样率对于数据解算影响较小[9],个别历元由于数据强相关将导致用LS估计未知数的法方程严重病态[10],故数据解算时采样间隔设定为10 s。测段GNSS可用卫星天空俯视示意图见图1。
由于测站环境较为开阔,无明显遮挡物,GPS与BDS可用卫星数量较多,对测量段可见卫星相位残差进行统计,结果见图2。
由图2可知,GPS、GLONASS与 BDS卫星L1/B1频点相位残差均值在零线附近波动,极值小于2 mm;L2/B2频点相位残差均值则有较为明显的波动。由相位残差标准差(standard deviation,STD)统计值可知,L1/B1频点相位STD值小于L2/B2频点STD值,约为4 mm。北斗B2频点残差STD值略优于GPS与GLONASS卫星,GLONASS卫星L2频点STD略大于其他系统。可见,BDS卫星信号质量与GPS信号质量基本一致,两类观测值可作为同等精度观测量进行处理,GLONASS卫星可适当降权处理。
为研究残差序列的统计特性,对GPS、BDS与GLONASS三类系统中观测时间较长的MEO卫星进行正态分布检验,结果分别见图3(G28)、图 4(C12)与图 5(R17)。
由图5可知,GPS与BDS卫星(PRN:G28与C01)两个频点的相位残差基本服从正态分布,直方图正态拟合线与残差直方图较为符合,残差分布概率线与正态分布线基本重合,可见,GPS与BDS卫星超短基线的残差基本服从正态分布,无明显系统性偏差。与之相反,GLONASS卫星(PRN:R17)的相位残差直方图与正态拟合线有显著差异,残差正态分布概率线与正态分布线的重合度较低,可见,GLONASS卫星相位残差难以满足正态分布,其残差可能存在系统性误差影响,因此,在GNSS测量定位中,当卫星数较多时,建议对GLONASS卫星降权或剔除;当卫星数较少时,可适当选择GLONASS卫星参与定位解算,保证定位解算结果的连续性与可靠性。
1.2 GPS & BDS权比
采用两台徕卡GNSS接收机(LEICA GS14)采集多星多频资料(GPS:L1+L2;BDS:B1+B2),采样间隔设定为15 s,截止高度角设定为10°,采集日期为2018年9月11日上午(UTC:10:15~12:40)。为模拟实际电力工程测量中较为复杂的测量环境,流动站安置在墙边 空卫星俯视示意图见图8。
BDS卫星(PRN:C05)数据为单频并且质量较差,故该卫星数据不参与基线解算。由于测量环境较为复杂,GPS与BDS可用卫星有所减少(GPS平均可用卫星约8.5颗,BDS平均可用卫星约9.0颗)。二者卫星数量基本相同,可通过设置不同的先验权比解算基线分量,进而合理地确定GPS与BDS资料解算时的先验权比。
结果分析:基线解算时,对GPS与BDS观测数据分别赋予不同的权比,比较不同权比下基线解算的精度指标。分别采用单频与双频数据进行GPS&BDS组合动态相对定位,结果见图9和图10。采用LAMBDA方法进行模糊度固定,其Ratio值的阈值设定为3.0,即Ratio值大小于3.0则为固定解。
由图9可知,随着GPS/BDS先验权比的不断变大(1∶9~16∶1),水平方向均方根(root mean square,RMS)值呈现明显的先降低后增加的趋势,在权比为1∶1时水平方向RMS值最优;当权比大于10后,东西方向RMS呈现明显增加的趋势。高程方向RMS值在GPS/BDS权比小于1∶1时变化较小,之后随着权比的不断增大;高程方向RMS有显著增加,当权比大于12∶1后,其RMS值增加的趋势更加明显。固定率呈现由小变大再变小的趋势,当权比由1∶2变大到12∶1时,固定率基本相同,随着权比的继续变大,固定率显著降低。
由图10可知,随着GPS/BDS先验权比的变化,水平方向RMS值同样呈现先降低后增加的趋势,但整体变化较小,基本在5 mm左右浮动。高程方向RMS值也呈现先变小后变大的趋势,当权比大于1∶1后,高程方向RMS值呈明显变大趋势。双频固定率则呈现先变大后减小的趋势,当权比为1∶1时,固定率取得峰值。
综合分析图9和图10可知,当GPS/BDS先验权比设定为1∶2~2∶1时,两种卫星组合系统可取得最优解,当二者权比小于1∶9或者大于10∶1,从数值分析角度看,此时二者的观测精度已非同一量级,统一平差将显著增加法方程矩阵的病态性,导致解算结果有偏差或难以收敛。
不同类观测值联合平差时,合理的先验权比可充分发挥观测值的质量,改善平差结果的精度。结果表明:随着GPS/BDS先验权比的不断变大(1∶9~16∶1),动态相对定位基线解在水平方向的RMS值呈明显的先降低后增加的趋势,权比为1∶1时RMS值最小。高程方向RMS值在GPS/BDS权比小于1∶1时变化较小,之后随着权比的不断增大,高程方向RMS有显著增加,模糊度固定率则呈现由小变大再变小的趋势。由图表结果可知,在实际测量数据中,GPS与BDS的先验权比建议设定为1∶1,浮动为1∶2~2∶1。
2 精度可行性实例分析
测试时间:2018年10月19日—2018年10月21日
测试目的:对比三星V30接收机(采用天宝三星主板,GPS+GLONASS+BDS)和BD970接收机(采用天宝BD970双星主板,支持GPS+GLONASS)、北斗试验机(采用北斗双星主板,支持GPS+BDS)的RTK初始化固定时间、精度及数据质量情况。在测试时同时采集静态数据用于结果分析。
测试环境:树木严重遮挡区。
测试方法:采用合理定权的方法,确定好先验权比为1∶1,在观测条件较好的某大厦10楼分别架设三星V30、BD970和北斗RTK基站各一台。其他仪器做移动台。15 km作业距离,在植被遮挡环境下进行测试,如图11,分别记录固定时间,同时采集20组数据,每组10个点。
2.1 置信度统计
15 km植被遮挡环境下各流动站进行RTK作业数据采集,分为上午和下午两个时段进行,对各台仪器采集数据进行精度内符合统计,精度统计分95.5%和68.2%置信度进行分别统计,统计结果见表1和表2。
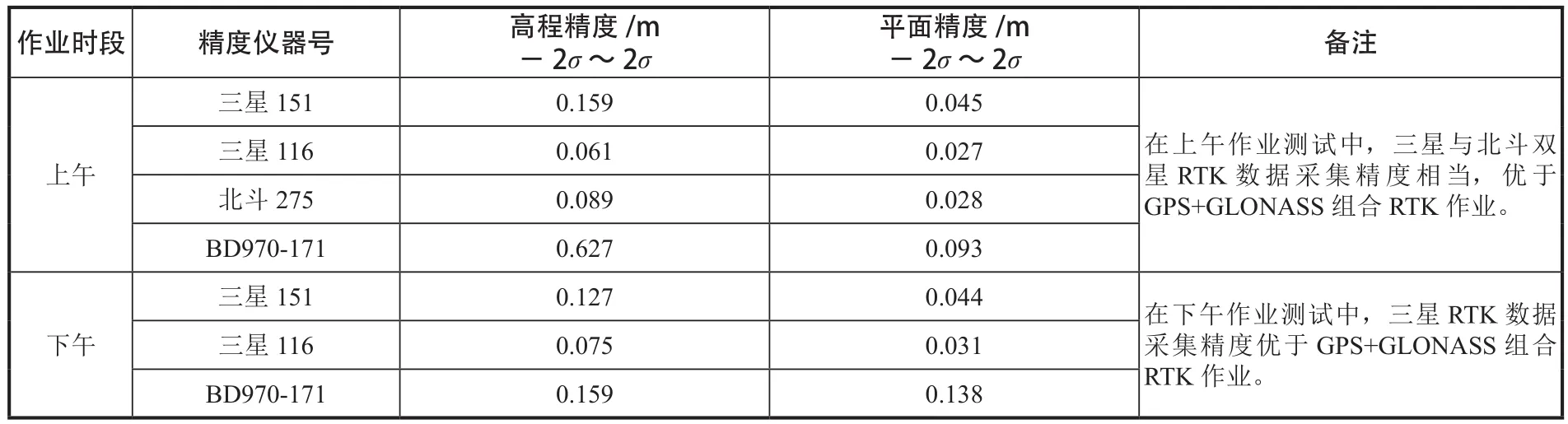
表1 15 km植被遮挡环境测试95.5%置信精度统计表
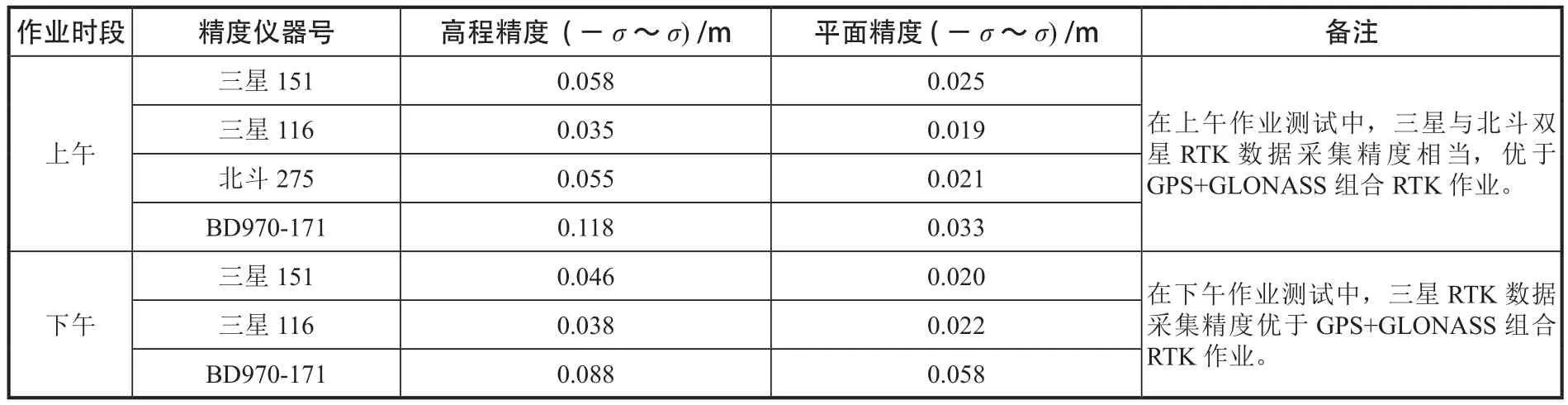
表2 15 km植被遮挡环境测试68.2%置信精度统计表
2.2 固定时间统计
在15 km植被遮挡环境作业中记录各流动站加入北斗后的固定时间比未加入北斗都要快。其中三星基本在100 s左右固定,在固定时间和固定次数上有优势,固定率90%,双星BD970固定率49%,双星北斗固定率68%。双星北斗快三星10 s左右,三星快双星BD970 10 s左右。显然。15 km植被遮挡环境中上午和下午作业时段的收敛时间见图12和图13。
3 结论
通过本文研究及测试,表明采用基于北斗的多星座系统联合定位方法,在实际测量数据中,当卫星数较多时,对GLONASS卫星降权或剔除;当卫星数较少时,可适当选择GLONASS卫星参与定位解算,保证定位解算结果的连续性与可靠性,同时GPS与BDS的先验权比设定为1∶1,浮动范围为1∶2~2∶1。这样可以提高收星个数,缩短获得固定解时间,满足不同时间段的定位需求,且精度具有可行性足,从而论证了在电力工程测量中,面对树木严重遮挡等复杂工况,采用基于北斗的多星座系统联合定位方法,通过合理定权,能提高接收机获得GNSS定位固定解的能力和速度,测量精度具有可行性,从而能提高电力工程测量定位作业效率。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
社会科学战线(2022年1期)2022-02-16
客联(2021年9期)2021-11-07
空军工程大学学报(2021年2期)2021-05-29
海外文摘·艺术(2020年22期)2020-11-18
北京航空航天大学学报(2020年10期)2020-11-14
中国新通信(2020年3期)2020-07-06
北京航空航天大学学报(2019年9期)2019-10-26
制导与引信(2018年2期)2018-11-09