
下肢康复机器人联合镜像疗法对脑卒中偏瘫患者肌力及平衡功能的影响
2020-08-06 08:38兰天
中国疗养医学 2020年8期
兰天
脑卒中具有发病率高、致死率高等特点,常由脑血管阻塞或破裂引起,多以偏瘫形式出现,尤其是下肢偏瘫,对患者的日常生活产生直接影响,因此,改善患者肢体功能恢复是治疗该病的关键[1]。随着科学技术的进步,先进的康复设备在肢体功能恢复的治疗中得到了广泛的应用,且效果良好。镜像疗法最初应用于减轻患者截肢后的肢体疼痛,如今也被运用于肢体康复治疗中[2-3]。鉴于此,本研究探讨脑卒中偏瘫患者应用镜像疗法联合下肢康复机器人对患者肌力及平衡功能的影响。具体分析如下。
1 资料与方法
1.1 一般资料 选择本院2018年3月至2019年12月收治的脑卒中偏瘫患者60例,经我院医学伦理委员会批准,采用盲抽法随机分为观察组30例和对照组30例。观察组中男18例,女12例;年龄45~70岁,平均年龄(56.34±5.28)岁;病程3~9个月,平均病程(5.53±1.49)个月。对照组中男17例,女13例;年龄46~71岁,平均年龄(57.24±6.12)岁;病程4~10个月,平均病程(5.98±1.85)个月。组间上述资料对比,差异无统计学意义(P>0.05),具有可对比性。
1.2 入选标准 纳入标准:患者符合《中国脑血管疾病分类2015》中脑卒中的诊断标准[4],且经CT或影像学确诊;均为首次发病;有偏瘫症状且无精神疾病;患者及其家属知情并签署同意书,且依从性较高。排除标准:合并严重心、肺部疾病不适合早期康复治疗患者;合并严重心理或认知障碍患者;合并视觉功能、感觉功能或失语障碍患者;合并脑器质性疾病或精神障碍导致的严重疼痛患者;合并恶性进行性高血压患者。
1.3 方法
1.3.1 对照组 采用常规康复治疗:为了诱导患者随意运动以及加强患者肢体运动控制训练,可进行主被动关节活动训练、坐位站位平衡训练、翻身肢位摆放训练、步行训练以及上下楼梯训练等。偏瘫侧肢体进行负重训练,使患者肩关节受到挤压;对肌腱或肌腹部位进行轻拍或敲打,通过关节反射等使得患者肢体各部位进行随意运动,并逐渐加强;为了降低患者肌张力可通过抑制手法减少肢体痉挛。训练60 min/次,1次/d,6 d/周,共进行4周。
1.3.2 观察组 在对照组基础上,观察组采用镜像疗法以及下肢康复机器人训练。镜像疗法:训练前向患者详细阐述镜像疗法的基本原理,使患者更好的配合治疗。治疗时患者端坐于凳子上,沿中矢面放置一个垂直于患者下肢的镜子,把镜面朝向健康的一侧,背面朝向受影响的一侧,方便患者观察到镜子中健侧的运动成像,受影响的一侧因被遮挡住而无法看见。固定住患者的患肢,针对健肢进行训练,动作包括膝关节屈伸、髋关节屈伸、足跟触地踝关节背屈、踝关节外翻、髋关节内收外展等,嘱咐患者缓慢执行动作训练,同时仔细观察健肢的运动成像并在脑中想象成患肢的运动。每个动作做5组,10次/组,每组动作间隔时间为10 s,总训练时长为30 min/次,1次/d,6 d/周,共进行4周。下肢康复机器人训练方法为:为了控制住患者的踝关节和膝盖,将模式设定为指定模式,然后开始重复运动。在步行训练中可辅助摆动患者偏瘫下肢运动,从而避免膝盖的过度伸展,保证脚的背屈。训练开始时,为了确保患者骨盆旋转、臀部伸展和躯干挺直,患者需要治疗师站在身后及时给予指导。随着患者训练效果逐渐改善,最终达到患者可以独自行走的目的,开始时间设定为10 min,然后结合患者的恢复情况合理增加到20 min,1次/d,6 d/周,共进行4周。
1.4 评价指标 下肢肌力比较:采用徒手肌力量表(MMT)[5]评估患者下肢肌力,按照从低到高分为6个等级,等级越高,代表患者肌力越强。平衡功能:采用Berg平衡量表[6]评估患者的平衡功能,量表共14个条目,采用4级评分法,总分为56分,分值与患者的平衡能力呈正比。
1.5 统计学方法 数据采用SPSS 18.0软件处理,以(±s)表示计量资料,组间用独立样本t检验,组内用配对样本t检验,计数资料用率表示,采用χ2检验,P<0.05为差异具有统计学意义。
2 结果
2.1 两组患者干预前后MMT等级比较 干预前,两组患者MMT等级相比,差异无统计学意义(P>0.05);干预后,两组下肢MMT等级均升高,且观察组高于对照组,差异有高度统计学意义(P<0.001,见表1)。
表1 两组患者干预前后MMT等级比较(±s) 单位:级
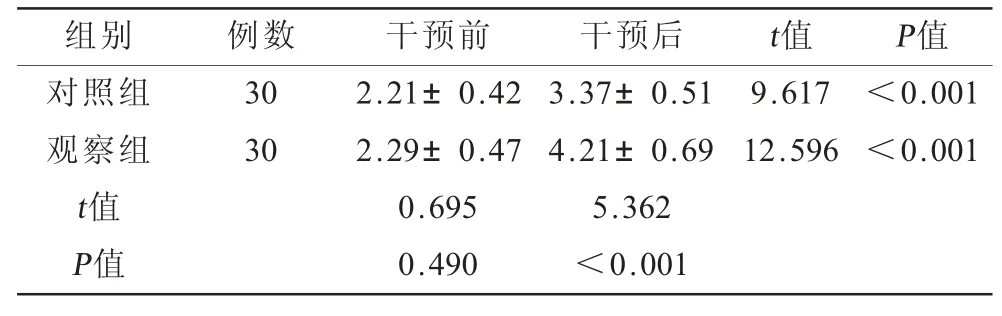
表1 两组患者干预前后MMT等级比较(±s) 单位:级
?
2.2 两组患者干预前后平衡功能比较 干预前,两组患者平衡功能相比,差异无统计学意义(P>0.05);干预后,两组平衡功能均升高,且观察组高于对照组,差异有高度统计学意义(P<0.001,见表2)。
表2 两组患者干预前后平衡功能比较(±s) 单位:分

表2 两组患者干预前后平衡功能比较(±s) 单位:分
?
3 讨论
随着我国人口老龄化加重,脑卒中的发病率也在逐年上升,其中最常见的功能障碍是偏瘫,又被称作半身不遂,常见的是患者舌肌下部、面肌或上下肢等出现障碍,如不及时给予有效治疗,会使患者出现肌肉痉挛、肢体运动模式及感觉异常、关节挛缩僵硬、肌张力升高、异常反射兴奋等症状,严重影响患者的生活质量[7-8]。故应寻找有效方式改善患者的平衡能力与下肢肌力。
镜像疗法是指通过视觉反馈、虚拟现实以及视错觉等方式使患者想象并带动肢体运动的治疗方式。它可使患者神经传导通路和小脑半球被激活,并通过视觉反馈影响运动区与中枢的皮质电活动,因中枢具有可塑性,所以患者的运动缺陷可通过功能重组来弥补,由于镜像神经元的作用机制,皮质脊髓束的兴奋性和易化效应有利于肢体功能的恢复。下肢康复机器人利用患者在减重状态下,通过外部结构的带动,让患者逐渐接近正常步态,增强患者关节的协调性和稳定性,使患者下肢肌群的力量增强。研究证实,下肢康复机器人可为患者提供背伸、跖屈的运动模式,通过上下摆动踝关节模式训练,对患者踝关节周围肌群和关节活动度实现有效训练。除此之外,下肢康复机器人还可为患者提供对称式训练,帮助患者提高下肢步态同步性,加快肢体恢复速度[9-10]。本研究结果显示,干预后,观察组下肢肌力等级、平衡功能均较对照组高,表明脑卒中偏瘫患者可通过镜像疗法联合下肢康复机器人改善肌力水平以及平衡功能。其原因在于,在镜像疗法的帮助下结合下肢康复机器人的主动、被动训练,二者互相补充,进一步提升治疗效果。
综上所述,脑卒中偏瘫患者可通过镜像疗法联合下肢康复机器人改善肌力水平以及平衡功能,值得临床推广应用。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
健康体检与管理(2022年4期)2022-05-13
昆明医科大学学报(2022年3期)2022-04-19
医学概论(2021年19期)2021-01-21
当代党员(2020年20期)2020-11-06
好日子(2018年9期)2018-10-12
小康(2018年23期)2018-08-23
中国体育教练员(2018年2期)2018-07-23
Coco薇(2017年12期)2018-01-03
家庭用药(2016年9期)2016-12-03
