
基于机器视觉的智能坐便器遥控器自动识别与可靠性试验设备
2020-08-05 05:40翁晓伟叶益阳林相华
家电科技 2020年4期
翁晓伟 叶益阳 林相华
1.台州市产品质量安全检测研究院 浙江台州 318000;
2.浙江大学台州研究院 浙江台州 318000
1 引言
自我国游客在日本抢购智能马桶盖事件的发生,智能坐便器便以“黑马”的姿态闯入大众视野,被越来越多的民众所关注。目前,智能坐便器产业步入了黄金期,产业技术水平持续提升,智能坐便器产品作为日常洁具逐渐进入了大众生活,随着人们生活水平的不断提高和市场竞争的日益激烈,可靠性指标已成为企业提高产品质量、提升品牌知名度、赢得市场的关键因素之一。可靠性也称为寿命或耐久性,产品的可靠性越好相对寿命就越长,产品的寿命越长也就越经久耐用,可靠性因此成为产品综合质量水平的集中体现。
智能坐便器产业属于新兴产业,检测中所涉及的可靠性性能检测设备全部为非标准设备,存在设备生产企业少,设备定型难、安装不方便等问题。具体表现如下:(1)设备便利性方面:对于遥控型的智能坐便器,由于实验室进行可靠性测试需要在遥控器上操作相应的功能,而各个品牌甚至同一品牌不同的系列,都有不同的遥控器,如图1所示。常见智能坐便器遥控器按键的形式有:按钮型、触摸感应型、薄膜开关型、触控型;遥控器按键布局有:单面型、正面侧面型、正面斜边型、正面两边型;遥控器的外型有:长方形、长条形、胶囊型、异型。经调研,目前市面上的检测设备已经无法应对快速增长的智能坐便器遥控器发展的需求,现有的测试系统按键检测使用气动手指,主要存在安装不便利、无法夹持、通用性太差等问题。(2)设备功能方面:国内智能坐便器检测设备主要生产企业都不具备打开盖板、关闭盖板、负载持续加载等步骤,与智能坐便器的实际使用不符合,无法很好地模拟智能坐便器的实际使用情况,影响检测结果的准确性。
因此,研制基于机器视觉的智能坐便器遥控器自动识别与可靠性试验设备,不仅能构建模拟实际使用情况的智能坐便器可靠性试验系统,而且依靠视觉技术使得安装更便捷,该设备对改善行业产品质量,提升产品竞争力具有重要的积极意义。
2 机械系统的设计和原理
本套系统主要由PLC、电源模块、步进电机、控制器、六自由度机械手等组成,如图2所示。本试验系统能够实现“机械手坐便器掀盖→移入砝码加压→机械手按钮(依次多个)→移走砝码→机械手坐便器关盖”这样的周期循环工作过程,很好地模拟了实际使用智能坐便器的用户实际场景[1],保证检测结果的准确可靠性;并根据不同厂家不同智能坐便器的功能,进行功能切换;根据不同消费者的需求,进行不同时间进度的设置。
2.1 工作原理
本套系统的核心处理部分是机械手和伺服驱动系统,组合实现系统的各种动作。
机械手为六轴组成的空间六杆开链机构,理论上可达到运动范围内任何一点。每个转轴均带一个齿轮箱,机械手运动精度(综合)达正负0.05 mm至正负0.2 mm。六轴均带AC伺服电机驱动,每个电机后均有编码器与刹车。机械手带有串口测量板(SMB),测量板上带有六节可充电的镍铬电池,起到保存数据的作用。机械手带有手动松闸按钮,维修时使用,非正常使用会造成设备或人员伤害。机械手带有平衡气缸或弹簧。
伺服驱动系统的结构示意图如图3所示,其基本功能是对位置、速度和电机电流进行数字化调整,对电机的交流控制进行同步。具体而言,伺服驱动系统又可分为两部分:(1)下位机部分,负责读取传感器数据、解算机械手的姿态以及控制电机的运动;(2)上位机部分,负责与下位机通讯、提供API接口函数以及通过视觉处理获取按钮位置。
2.2 系统设计
(1)夹装试验台设计。底座上设有固定坐便器和遥控器的夹具,由于坐便器和遥控器型式不同,夹具采用两轴加压板的气动结构,开始检测前,将坐便器和遥控器分别放置至待夹持区域,启动气动电磁阀,气缸伸出,固定坐便器和遥控器。
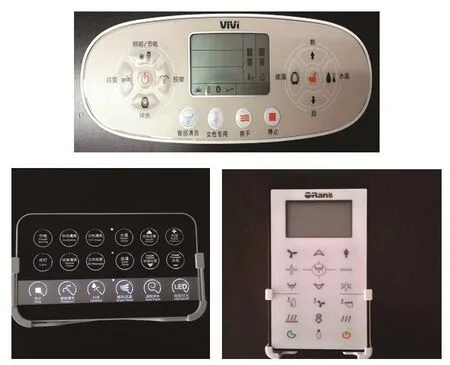
图1 不同形状的遥控器
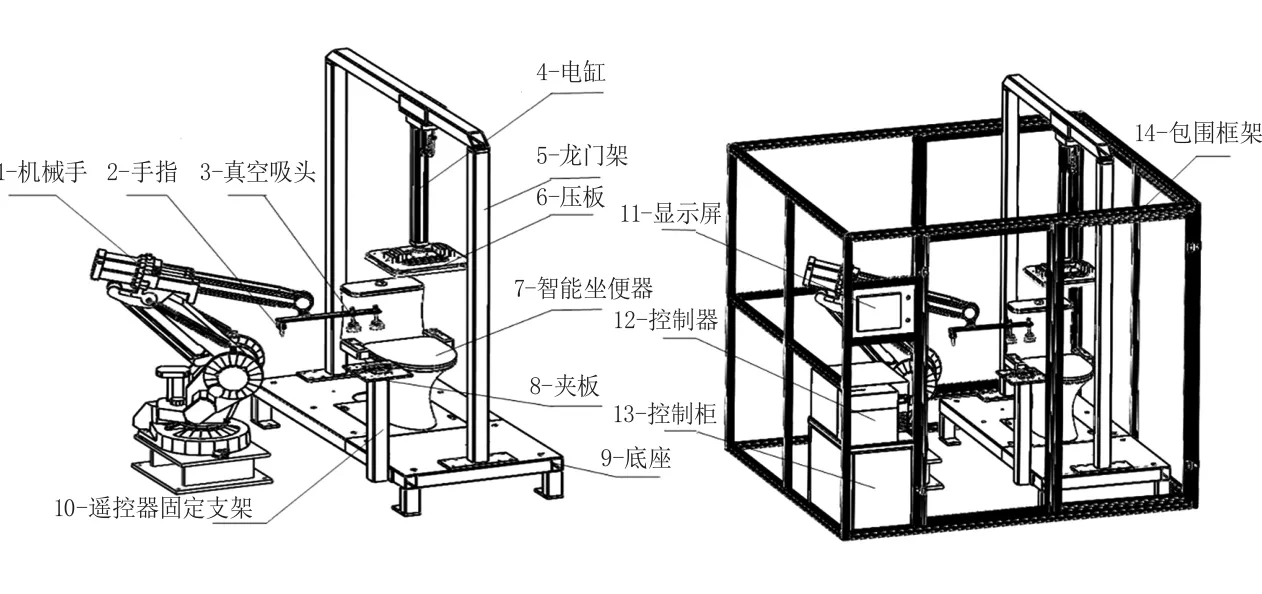
图2 智能坐便器遥控器自动识别与可靠性试验设备机械结构
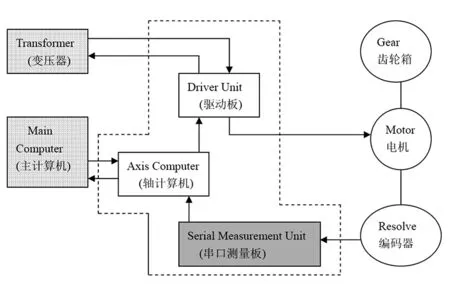
图3 伺服驱动系统结构示意图
(2)座圈可靠性试验模块设计。采用电缸取代了传统气缸,其将伺服电机与丝杠一体化设计的模块化,将伺服电机的旋转运动转换成直线运动,同时利用伺服电机最佳优点——精确转速控制和精确转数控制,达到精确推力控制,比原有气缸的推力更加稳定。电缸末端连接柔性材料制成的压板(模拟人体臀部尺寸)连接在龙门架上,通过电缸的推力精准模拟不同重量的人体的落座。
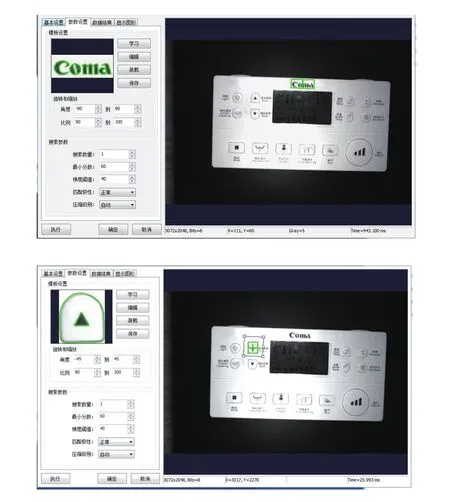
图4 智能坐便器遥控板检测软件型号、按钮模板设置界面
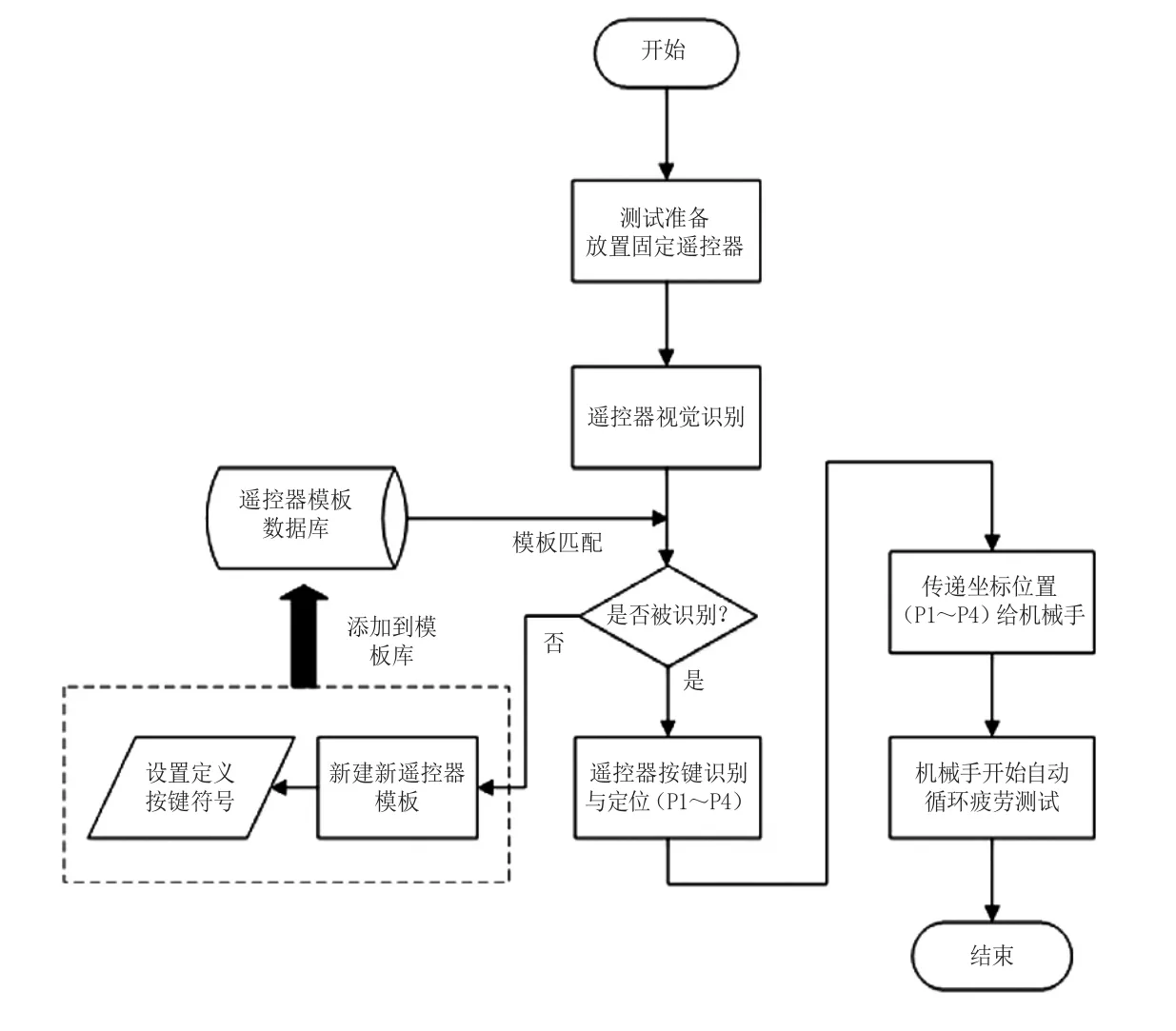
图5 视觉识别流程图
(3)翻盖可靠性试验模块设计。通过六自由度机械手的末端安装有柄梁、真空吸头手指组成的操作头,真空吸头贴合在智能坐便器盖后,真空发生器打开,吸头产生吸附力,在机械手的运动下开启马桶盖或闭上马桶盖,手指为柔性材料制成,机械手示教后运动按下相应的按键(如冲洗、妇洗等)。
(4)数据记录模块设计。测控系统的核心由PLC组成[2],PLC的IO口与六自由度机械手的信号线、下压机构电缸的继电器、真空吸头的真空发生器电磁阀及气动夹具的电磁阀连接。
3 视觉系统的设计和原理
在智能坐便器自动检测项目中,利用机器视觉快速、准确地获取遥控板的整体位置信息和全部按钮位置以及按钮具体功能信息,机械手根据这些信息对智能坐便器遥控板进行重复点击以实现自动检测。智能坐便器遥控板检测软件型号、按钮模板设置界面如图4所示。
3.1 工作原理
视频采集装置采用日本ARTRAY公司的CCD摄像机,摄像机安装在机械手本体外的固定位置,以便稳定识别安装架上的遥控器,视觉系统可分为图像获取、图像处理、图像理解、图像存储等功能模块[4],其中最核心的部分是图像处理,主要实现了图像的灰度化、图像的二值化、图像轮廓的提取以及中心点的生成等。具体到按钮的识别,其原理主要为:利用按钮上不同的简单图案、数字或字符,实现按钮的区分与位置获取,即将按钮识别转化为简单图案识别。
视觉识别流程如图5所示,首先,固定好遥控器后,系统会尝试进行视觉识别,若不能识别,会自动新建一个新的遥控器模板,并将其中的功能按钮也做相关的定义,整合成一个完整的数据包,添加到模板数据库。接着系统会再次对遥控器进行模板匹配,从而识别到该遥控器,若是已经测过的遥控器,系统一次便能准确识别到对应的模板,如此便能进一步识别到模板中的按钮图标与定位,将相应的位置数据传送给机器人,助力机器人实现自动循环测试。
3.2 系统设计
(1)标定板标定。利用标定板进行标定,将现实坐标系、相机坐标系和机械手坐标系这三者进行关联。
(2)模板设置。主要分为部分模板:根据不同厂家不同型号的遥控板的关键型号信息设置型号模板,一个型号模板对应唯一一款智能坐便器遥控板;每一个按钮图案设置按钮模板 ,一个按钮模板对应该型号智能坐便器遥控板上的按钮实际功能。
(3)形状匹配。按既定时间间隔对相机进行外触发,得到遥控器图像,根据设置好的型号模板对图像进行形状匹配,得到位置信息和对应厂家以及对应型号信息。并根据信息找到此前设置好的该型号按钮模板,根据按钮模板对该智能坐便器遥控板图像进行形状匹配,得到所有按钮的位置信息以及按钮对应的实际功能[3]。
(4)机械手操作。根据实操作顺序,视觉检测软件依次将所有的按钮位置信息通过485通讯协议传递给机械手。机械手移动到相应按钮位置,完成相应的操作。量盲测、企业产品委托定性等项目中,经过分析比较,现有设备更科学合理,极大地提高了检测效率和检验结果的准确性,其与传统设置比较结果如表1所示。

表1 传统和新设计可靠性试验装置参数比对
通过本系统实现自主、长期的测试,可以及时发现问题,大大提高智能坐便器的质量水平,降低智能坐便器的返修率,进一步促进智能坐便器产业的发展。
4 结语
基于机器视觉的智能坐便器遥控器自动识别与可靠性试验设备已经应用于浙江省消费者智能坐便器产品质
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
小猕猴学习画刊(2021年8期)2021-08-27
装备制造技术(2020年4期)2020-12-25
作文大王·低年级(2020年9期)2020-10-12
作文大王·低年级(2020年9期)2020-10-12
语文世界(小学版)(2019年2期)2019-02-24
知识就是力量(2019年12期)2019-01-14
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
