
基于CAE模型的船舶舱室自动识别高效算法
2020-08-05 08:11章志兵杨明润王丽荣陈有芳
精密成形工程 2020年4期
章志兵,杨明润,王丽荣,陈有芳
(1.华中科技大学,武汉 430074;2.中国船级社技术研究中心,北京 100007)
船舶舱室识别是船舶设计的关键环节,是船舶有限元分析(CAE)和船舶结构性能校核(Structure Design Program, SDP)的基础[1—2],因此,提高舱室识别效率和准确性,增强识别过程的自动性,对于船舶设计具有重大意义。
针对舱室识别问题,国内外学者研究提出了众多典型解决方案。单威俊等[3—5]提出了“切分拼接”方法,首先利用自由边过滤舱室内部结构,再根据船舶相交结构的特征,定义一系列规则,将模型切分成一块块舱室面,最后将舱室面拼接成舱室空间。该方法具有较高的自动性,但对船舶特征依赖性强,对于不同类型的船舶,需要定义不同的识别规则,并且经实验验证,识别准确率仅能达到60%,需要大量的人工干预,才可做到准确识别全船的舱室,并且识别效率不高,以大型油船、散货船为例,识别船体中单个舱室即需要耗费5 min。LEE S U等[6]采用自顶向下方法,利用分割面,进行布尔运算,将整个船体模型逐步切分,直至识别出所有舱室。该方法识别准确率高,但属于半自动方法,需要人工干预操作。在4万t的大型船舶上进行实验,表明该船体识别出所有舱室模型,需耗费约1 h。KONINGH D等[7]提出一种新的模型切分方法,混合使用体与平面来划分船体模型,简化了舱室建模过程,提高了舱室识别准确率,但自动化程度不高,需要人工进行图形交互操作,导致效率难以有突破性提高。
文中利用一种新思路,将舱室抽象识别为三维模型中的封闭空间,基于半边半面模型,定义了封闭空间的方向。以此为基础,提出了时间复杂度O(n)(n为模型中半面的数量)的半面扩展算法,利用模型拓扑关系和空间坐标数值计算,可高效识别出种子半面所属的极小封闭空间。在半面扩展算法基础上,实现了高效的舱室自动识别算法。
1 半边半面模型
CHEN H,LI Guang-ming,DANOVARO E 等[8—13]的研究表明,半边数据结构在三维模型的网格简化、模型切割方面具有良好的性能表现,并且易于拓展成紧凑性数据结构,在大规模模型处理中可节省较多的存储空间。DYEDOV V,RAY N等[14—16]的研究表明,半面数据结构在网格面细化、曲面重构方面具有良好的性能表现。为了提高舱室识别算法的可拓展性,在该算法中使用半边半面数据结构来表示几何元素,使该算法将来可融合于多种功能模块中。
一条无向边可拆分为两条方向相反的有向边。将有向边称为半边(Half-edge)。同一条无向边拆分成的两条方向相反的半边互为伴随半边(Accompany half edge)。
如图1所示,无向边e被拆分为Eh0和Eh1两条有向边,Eh0和Eh1互为伴随半边。无向边e具有两个端点v0和v1。半边Eh0的起点为v0,终点为v1;半边Eh1的起点为v1,终点为v0。
在半边模型基础上,可将一个无向面拆分为两个方向相反的有向面,有向面的方向根据组成该面的半边方向由右手定则确定。将有向面称为半面(Half-face)。同一个无向面拆分成的两个方向相反的有向面互为伴随半面(Accompany half face)。若半边Eh参与构成半面Fh,则称半面Fh包含半边Eh、半边Eh属于半面Fh。

图1 半边定义Fig.1 Definition of half-edge
如图2所示,无向面f被拆分为Fh0和Fh1两个有向面(为了图示清晰性,无向面f未在图中画出),Fh0和Fh1互为伴随半面。半边Eh0,Eh2,Eh4,Eh6构成半面Fh0,属于半面Fh0。半边Eh1,Eh3,Eh5,Eh7构成半面Fh1,属于半面Fh1。半面Fh0,Fh1的方向根据半边方向由右手定则确定。

图2 半面定义Fig.2 Definition of half-face
张奇华等基于拓扑学原理,提出了“有向性”和“封闭性”的概念[17]。在此基础上,结合半边半面模型,将封闭空间定义为由一组有向面围成的封闭区域,其中每个有向面的方向都指向该封闭区域内部。该定义相较于使用无向面定义封闭空间,具有以下优点:①提供了一种统一的封闭空间特征,可利用该特征,设计更简洁高效的封闭空间识别算法;② 使得相邻的封闭空间之间不再存在公共面,使所有的封闭空间相互独立,从设计上降低数据结构耦合;③ 利用组成封闭空间的有向面的方向,易于判断一个三维空间坐标是否处于封闭空间内部,提高算法可扩展性。
2 CAE船舶舱室自动识别算法
舱室识别算法总流程如图3所示。
Step 1:获取模型的所有face及face包含的edge元素。
Step 2:建立CAE模型的拓扑关系,并创建半边半面数据结构存储拓扑关系。
Step 3:取一个尚未被访问的半面作为种子半面;若不存在未被访问的种子半面,则结束。
Step 4:识别种子半面所属的极小封闭空间。使用半面扩展算法,以种子半面为始,向相邻半面扩展,并递归执行该过程,识别出所有属于该封闭空间的半面。
Step 5:存储识别结果。以一个新的半面数组存储表示该封闭空间。回到 Step3,递归地执行舱室识别过程。
Step 6:采用半自动方式剔除船体外部空间。程序标识出半面数量最多的一个极小封闭空间,用户可确认该空间为船体外部空间;或用户手动点选船体外壳上的一个半面,程序识别出该半面所属的极小封闭空间,标识为船体外部空间。

图3 舱室识别算法总流程Fig.3 Flow of cabin identify algorithm
2.1 CAE模型拓扑关系建立
船舶舱室是由一组面组成的封闭空间区域,封闭空间的边界面构成流形拓扑,因此要求在舱室识别过程中,能够通过给定的面获取其边界线,并通过边界线获取其连接的面,即给定的面相邻的面。
在船舶CAE模型中,曲线段已被离散为分段的直线段,曲面已被离散为空间2D单元[18],可将空间2D单元视为face,则舱室为由一组face组成的封闭空间区域。
在文中舱室识别算法中,需要建立的拓扑关系有:半面与半边的包含关系;半边与半边的伴随关系。
如图4所示,半面Fh0包含半边Eh0,Eh1,Eh2,Eh3;半面Fh1包含半边Eh4,Eh5,Eh6,Eh7;半边Eh1与Eh5互为伴随半边,并由此可推断出半面Fh0与半面Fh1相邻。
对于模型中每个空间 2D单元表示的无向小平面,创建两个方向相反的有向半面,并创建每个半面包含的半边。

图4 CAE模型拓扑关系示意图Fig.4 Diagram of CAE model topology relationship
为了建立半边的伴随关系,对每个半边的起点和终点构成的二元组(Star point,end point)进行编码,使得二元组(Star point,end point)的编码与二元组(End point,star point)的编码互为相反数,并且所有编码均不为 0。使用 Hash表进行存储,以二元组编码作为 Key,以半边数组作为 Value。创建每个半边时,设该半边的编码为x,则将该半边加入Key为x对应的Value半边数组中,并在Hash表中查询半边编码为−x的半边,记录半边伴随关系。
2.2 半面扩展算法
半面扩展算法用于识别三维模型中由半面构成的封闭空间。算法根据一个种子半面,识别出其相邻半面,并保证了被选择的相邻半面与种子半面属于同一封闭空间。递归执行上述过程,可识别出模型中与种子半面属于同一封闭空间的所有半面,即构成该封闭空间的所有半面。
图5a所示为三维网格模型的局部示例,图5b展示了该示例在二维视角下的半面扩展过程,即以空间内一个半面为起始,逐渐向周围半面搜索扩展,直至搜索出该空间内的所有半面。
图5c所示为半面扩展过程的一个详细示例。在本例中,以半面Fh0为种子半面,识别出其相邻半面中与Fh0处于同一封闭空间的半面Fh1,Fh2,Fh3,Fh4。递归执行半面扩展过程,以半面Fh1为种子半面,识别出半面Fh5,Fh6,Fh7;以半面Fh2为种子半面,识别出半面Fh8和Fh9;以半面Fh3为种子半面,识别出半面Fh10和Fh11;以半面Fh4为种子半面,识别出半面Fh12。不断递归执行此过程,直到识别出该封闭空间的所有半面为止。
种子半面在一个半边处可能存在多个相邻半面,针对该情况,文中提出了“半面匹配规则”。根据该规则,给定种子半面及其一条半边,可识别出种子半面在该半边处相邻的所有半面,并选择一个匹配的相邻半面,该半面与种子半面属于同一个封闭空间。在下文中,将该过程称为“半面匹配过程”。
如图5d和5e所示,从不同视角可看出半面Fh2与Fh13均与半面Fh0相邻,但以半面Fh0为种子半面进行半面扩展时,通过半面匹配规则判断,半面Fh2与Fh0处于同一极小封闭空间,故扩展到半面Fh2而没有扩展到半面Fh13。
如图6所示,种子半面为Fhseed,半面Fhseed的指定半边为Eh0。半边Eh0的伴随半边Eh1,Eh2,Eh3(为了图示清晰性,半边Eh2,Eh3未在图中画出)所属的半面分别为Fh1,Fh2,Fh3,共3个半面,这些半面称为半面Fhseed在半边Eh0处的相邻半面,其中半面Fh3为种子半面Fhseed的伴随半面。如图6b所示,以半边Eh0为轴,按照半面Fhseed的方向,从半面Fhseed到半面Fh1,Fh2,Fh3的有向角分别为θ1,θ2,θ3,角度值的范围为(0,2π]。
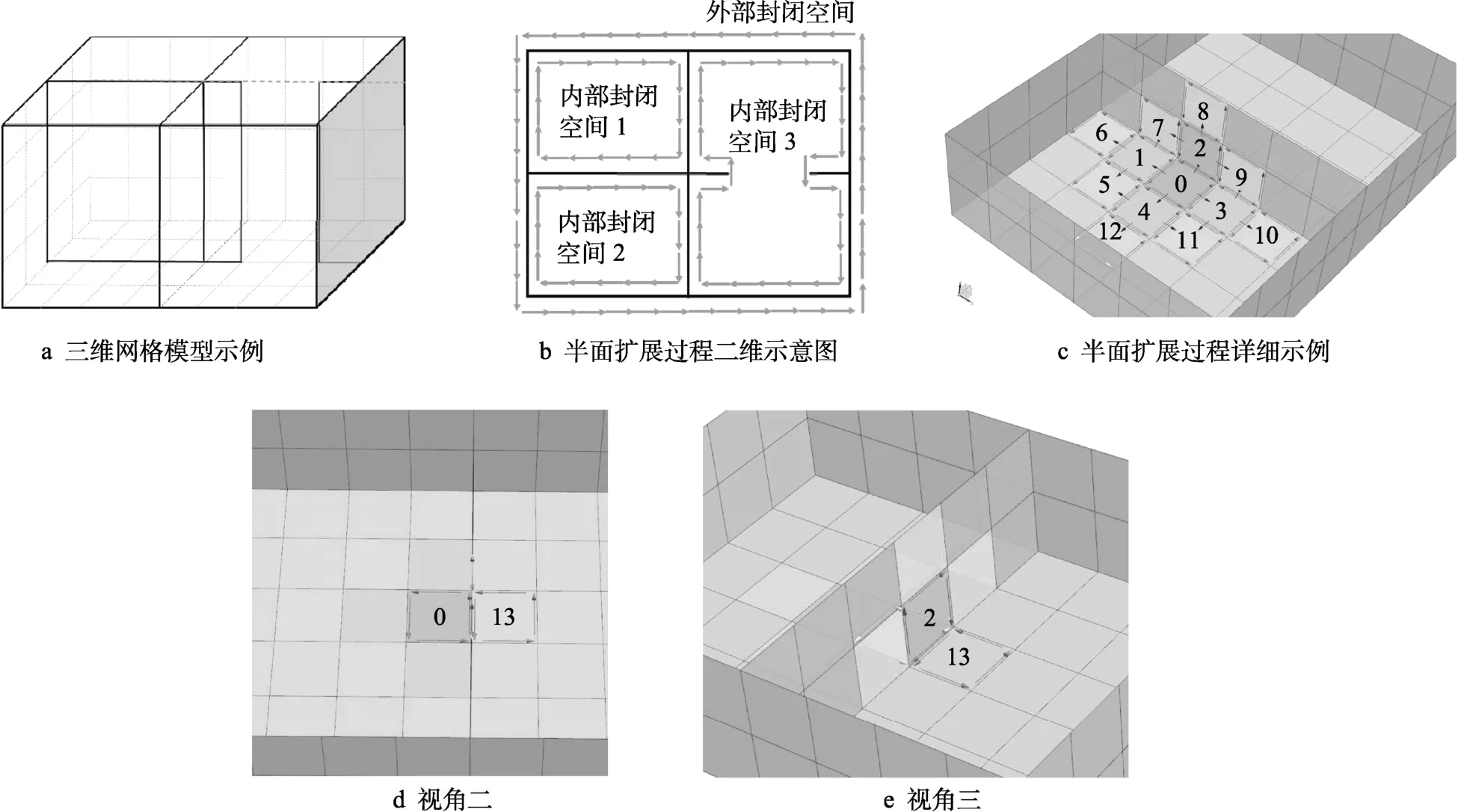
图5 半面扩展算法示意图Fig.5 Diagram of half-face expansion algorithm

图6 半面匹配规则示意图Fig.6 Diagram of half-face matching rule
半面匹配规则描述如下:对于给定的半面半边二元组(Fhseed,Eh0),其中半面Fhseed为种子半面,Eh0为Fhseed的一条半边,半面集合FH中的所有半边Fhi均为半边Eh0关联的半边所属的半面。其中集合FH一定不为空集,因为种子半面Fhseed的伴随半面必定属于集合FH。以半边Eh0为轴,按照Fhseed方向从半面Fhseed到集合FH中半面Fhi的有向角为θi,则种子半面Fhseed在半边Eh0处的匹配半面为最小有向角θj对应的半面Fhj。半面Fhj与种子半面Fhseed处于同一封闭空间。
例如在图示 6b中,θ1为最小有向角,根据该规则,种子半面Fhseed在半边Eh0处所匹配的半面为Fh1。
如3.1节所述,在舱室识别算法总流程中,使用半面扩展算法识别出种子半面所属的封闭空间。半面扩展算法流程如图7所示。
Step 1:新建一个半面数组,表示种子半面所属的封闭空间,用于存储识别出的半面。
Step 2:新建一个半面队列。在半面扩展算法执行过程中,该队列中的半面状态为:已被识别出属于当前封闭空间,但尚未执行以该半面为种子半面的半面匹配过程。
Step 3:将种子半面加入队列尾部,并标记为已访问。
Step 4:判断队列是否为空。若队列为空,则半面扩展算法过程结束;否则继续执行半面扩展算法。
Step 5:从队列首部取一个半面作为种子半面,并从队列中将其删除。

图7 半面扩展算法流程Fig.7 Flow of half-face expansion algorithm
Step 6:执行半面匹配过程。根据半面匹配规则,识别出种子半面相邻的、尚未被访问的、属于同一封闭空间的半面。
Step 7:将 Step 6中识别出的半面加入半面队列,后续作为种子半面递归地执行半面匹配过程。将其标记为已访问,防止后续被重复加入队列,导致冗余计算。
Step 8:将Step 5中取的种子半面加入表示该封闭空间的半面数组。回到Step 4,递归地执行半面扩展过程。
分析可知,在识别过程中,对模型中的每个半面,仅进行了常数次访问;由于船舶模型中任何半面包含的半边仅有常数个,且任何半边的伴随半边仅有常数个,故半面匹配过程耗时为O(1),所以舱室识别过程的时间复杂度为O(n),已达渐进最优,其中n为模型中半面的总个数。
3 应用实例
在NX11.0平台上,以C++语言实现文中的CAE舱室自动识别算法,并使用多种船体模型进行测试。测试计算机CPU为Intel Core i5-6400 2.70 GHz,内存容量为8 GB,操作系统为64位。
图8所示为一个18万t大型散货船CAE模型,图9所示是对该模型的舱室识别结果。该模型共有CAE单元329 509个,识别结果共有1190个封闭空间。
经多次重复测试,测量算法中“建立拓扑关系”、“识别舱室”两部分的耗时情况,测量结果为:建立拓扑关系耗时约3.2 s;识别舱室耗时约0.5 s,总耗时约4 s。
分析测试结果可以发现,建立CAE模型拓扑关系过程耗时较多,因为该过程涉及大量的内存申请、赋值操作,且半边查找总过程平均情况时间复杂度为O(n),最坏情况时间复杂度为O(nlogn)(其中n为模型中半边的总个数);识别舱室过程耗时较短,因为仅仅涉及数值计算和数据结构的调用,且该过程时间复杂度为O(n)(其中n为模型中face的总个数)。从算法复杂度角度可证明该识别算法的高效性。
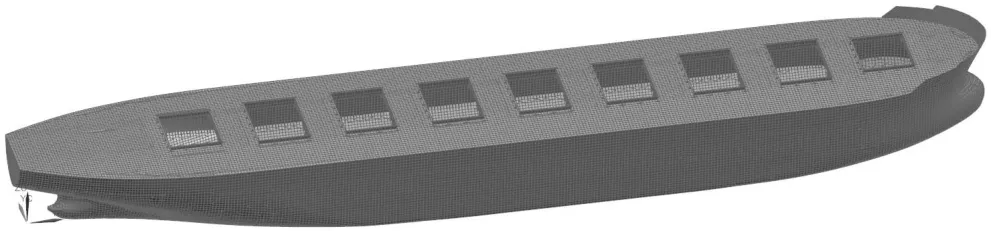
图8 18万t大型散货船CAE模型示意图Fig.8 Diagram of CAE model for 180,000 tons large bulk carrier
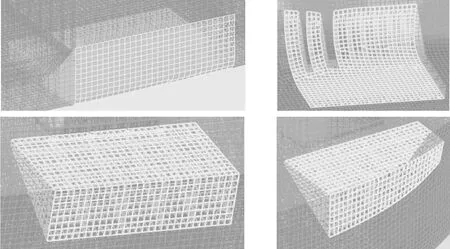
图9 大型散货船CAE模型舱室识别结果示意图Fig.9 Diagram of CAE model cabin identification results for large bulk carriers
对比测试使用NX系统内置的船舶模块中的舱室识别功能。该功能需要选择种子点,一次识别种子点所在的单个舱室,使用二次开发方式利用该功能循环识别出所有舱室,并使用计时工具仅累积测量识别过程的耗时,排除其他因素影响。利用上述模型重复测试,结果表明,识别出所有舱室耗时约180~200 s。
测试结果表明,该算法效率较高,18万t大型散货船CAE模型的舱室识别仅耗时4 s;识别准确率较高,所有CAE舱室都已准确识别,无遗漏部分、无多余部分。
4 结语
提出了一种半面扩展算法,并基于此提出了CAE舱室自动识别算法。经实际工程项目应用检验表明,算法具有很高的效率和准确性;算法可拓展性强,在该算法基础上,易于拓展出船舶舱室的相关功能,例如,识别舱室边界构件和内部构件、识别舱室中的型材、舱室合并等。该算法可广泛应用于船舶 CAE系统中,提供舱室相关构件的高效、准确的识别功能。本质上,该算法是对三维模型中封闭空间的识别,可预期在未来应用于各类三维建模系统中。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
船舶(2021年4期)2021-09-07
小哥白尼(趣味科学)(2019年10期)2020-01-18
儿童时代·幸福宝宝(2019年9期)2019-10-28
船舶标准化工程师(2019年4期)2019-07-24
莫愁·家教与成才(2017年7期)2017-07-11
中国船检(2017年3期)2017-05-18
舰船科学技术(2015年8期)2015-02-27
船海工程(2013年6期)2013-03-11
