
基于流固耦合的仿生海鸥机翼气动弹性分析
2020-08-05 06:32:14贾文隽史继拓左晨熠
兵器装备工程学报 2020年7期
贾文隽,华 欣,史继拓,左晨熠
(1.空军航空大学 a.航空作战勤务学院; b.教学考评中心, 长春 130022;2.中国人民解放军 95437 部队,四川 南充 637000)
进入本世纪以来,长航时无人机应用十分广泛[1]。仿生机翼的应用提高了机翼的气动效率[2-3],大展弦比轻质机翼的应用使得机翼的升阻比提高,但同时机翼的柔性也会增大,机翼不再是线性化的小变形,严重影响了飞行性能[4]。
因此对机翼气动弹性的研究被提上议程。
目前,研究气动弹性问题的方法主要有3种,即:风洞实验,飞行试验和数值模拟[5]。风洞实验的成本过高,而且由于边界效应的干扰与真实流场有一定差距,使结果不准确。飞行试验的危险性较大,而数值模拟成本低廉,在计算条件设置上更加便捷,因此是气动弹性研究的首选方法[6]。数值模拟要将计算流体力学与计算结构力学进行耦合计算,即流固耦合计算[7-8]。
本文采用仿生海鸥翼型改进的大展弦比机翼,采用格子玻尔兹曼流固耦合方法分析机翼的气动弹性特征,与普通的气动分析进行对比,指出采用流固耦合分析方法研究气动弹性问题的必要性。进一步对比了仿生机翼与标准机翼的气动性能,分析仿生机翼的优势和不足。
1 仿生机翼的构建及网格划分
鸟类飞行时具有低阻力、高升力的特性,将海鸥、长耳鸮等典型鸟类的低阻力、高升力特性应用到机翼设计上,对机翼翼型进行仿生设计是提高飞机效率的有效方法[9]。哈尔滨工业大学的潘尔振对海鸥的飞行原理进行了研究[10],并针对需求设计出了仿生海鸥机翼,进行了多款实物试飞。考虑在低速领域,鸟类的飞行效率与人类设计的飞行器相比更加高效。
本文的计算对象是大展弦比仿海鸥构型机翼,通过对海鸥翅翼样本进行逆向建模并优化得到逆向翅翼模型[11-13]如图1所示。
图1 逆向翅翼模型示意图
选取海鸥逆向翅翼模型展长50%处的翼型为基本翼型,按照图1的俯视图中线为放样引导线对翼型放样,在此基础上在翼尖方向上添加了一段平直机翼,机翼模型如图2所示,翼展构型尺寸如图3所示。
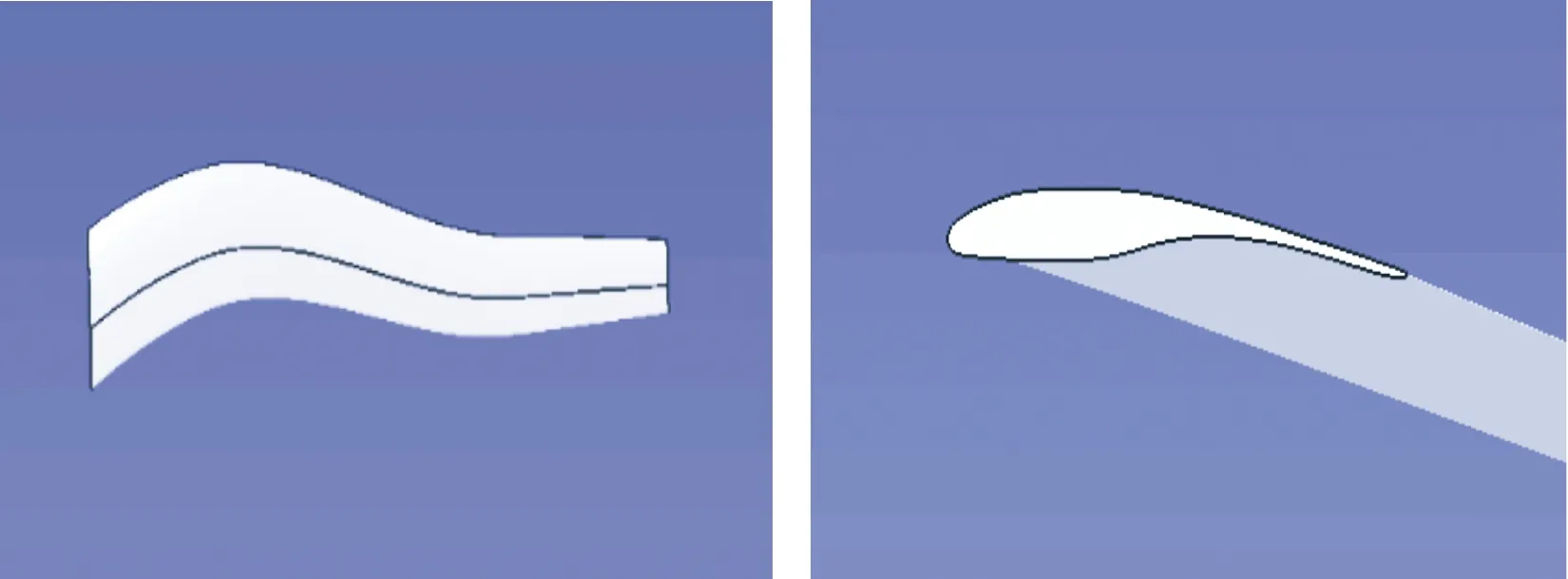
图2 机翼模型

图3 翼展构型尺寸
2 计算域的确立
采用XFlow软件分析流场,所建立的计算域是矩形区域,大小为12 m×4 m×6 m。边界条件为机翼翼根所接触壁面为自由滑移边界条件,两边壁面为周期性边界条件,前后分别为速度入口和压力出口,速度方向垂直于入口边界。为了协调计算准确性和计算时间之间的关系,基于格子玻尔兹曼方法对机翼及流场进行格子分布[14],流体域设置为自适应加密格子场,对流场远场端格子进行稀疏分布,求解模型区域对格子分布进行加密,提高计算效率。流场及机翼加密分布如图4所示。湍流模型选用LES-Wale模型[15]。
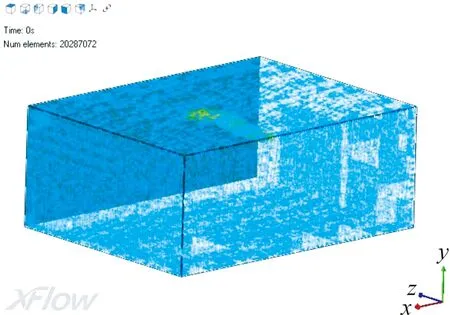
图4 流场域格子分布
当需要考虑气动弹性问题进行流固耦合计算时,流场计算时间步设为0.000 8 s;结构分析在Nastran中完成,时间步为0.005 s;XFlow和Nastran联合起来基于Simxpert计算平台进行大展弦比仿生机翼流固耦合计算每0.002 s耦合1次,共计算5 s。
将仿生机翼模型进行1∶10缩比,采用体网格的方式对模型进行网格划分,如图5所示。
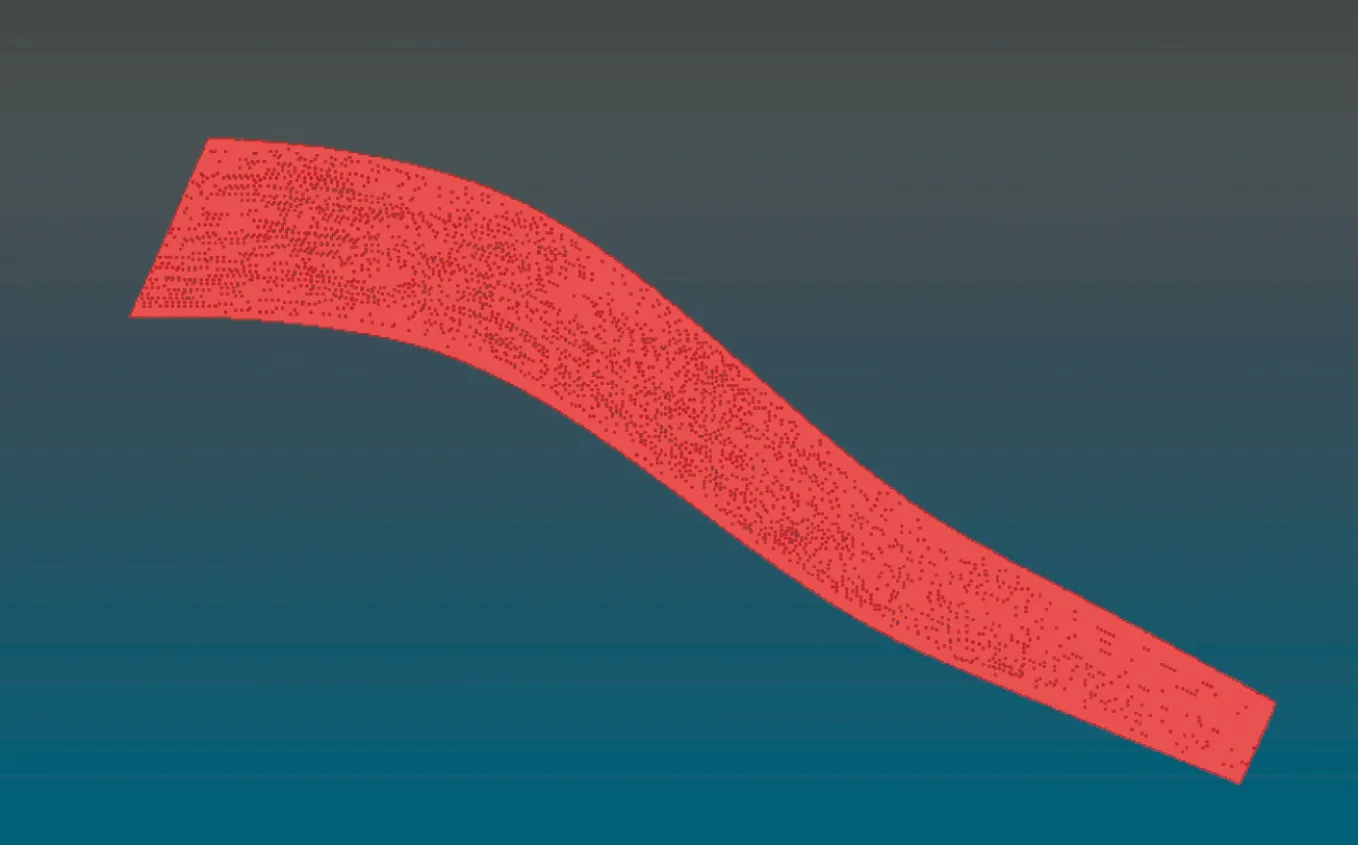
图5 机翼网格划分
3 仿生机翼无耦合与流固耦合计算分析
3.1 气动力对比分析
图6~图7表示在0°迎角下,速度载荷分别为:30 m/s、45 m/s、55 m/s时,大展弦比仿生机翼分别采用传统无耦合CFD算法与流固耦合算法的气动升力、阻力。
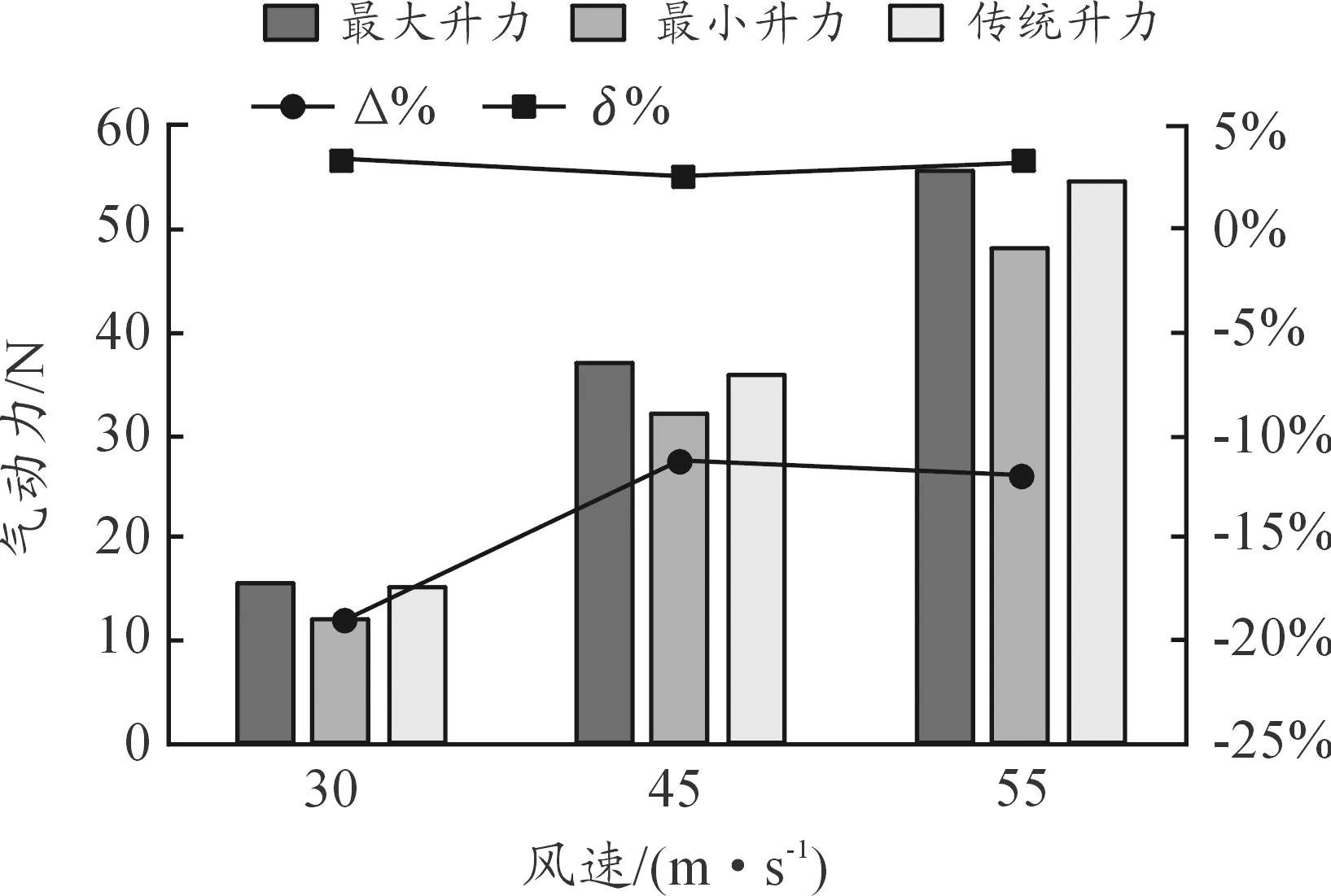
图6 升力图

图7 阻力图
由上图可知,无耦合算法与流固耦合法计算得的升力和阻力有着相似的变化趋势,即随着速度的增加,升力和阻力都增大。但两种的算法的计算结果有一定的差异。就升力而言,无耦合算法所得的升力大小介于流固耦合算法的最大升力与最小升力之间;与最大升力相比偏差较小,偏差率在4%以内,伴随速度的增加偏差率上下浮动,在速度为30m/s时偏差最大;与最小升力相比偏差较大,偏差率在10%~20%之间,伴随速度的增加偏差率上下浮动,在速度为30 m/s时偏差最大。流固耦合计算对阻力的结果影响较大,流固耦合的最大阻力和最小阻力均大于无耦合时的阻力,随着速度的增加偏差率急剧增大,甚至超过了100%,分别在55 m/s和45 m/s达到最大值。气动力是机翼设计的一项重要指标,然而传统无耦合算法的结果与实际情况偏差较大,对飞机的气动性能分析和安全性造成了一定的影响,而流固耦合分析更贴近实际情况,为机翼的设计提供了很好的参考价值。
3.2 流场对比分析
为了分析气动力变化的的原因,并进一步对比两种计算方法的区别。在不同速度载荷下对翼面的压力云图进行对比分析,如图8~图10所示。在流固耦合分析时,翼尖最大位移时刻为0.085 s,分析此时的压力云图。
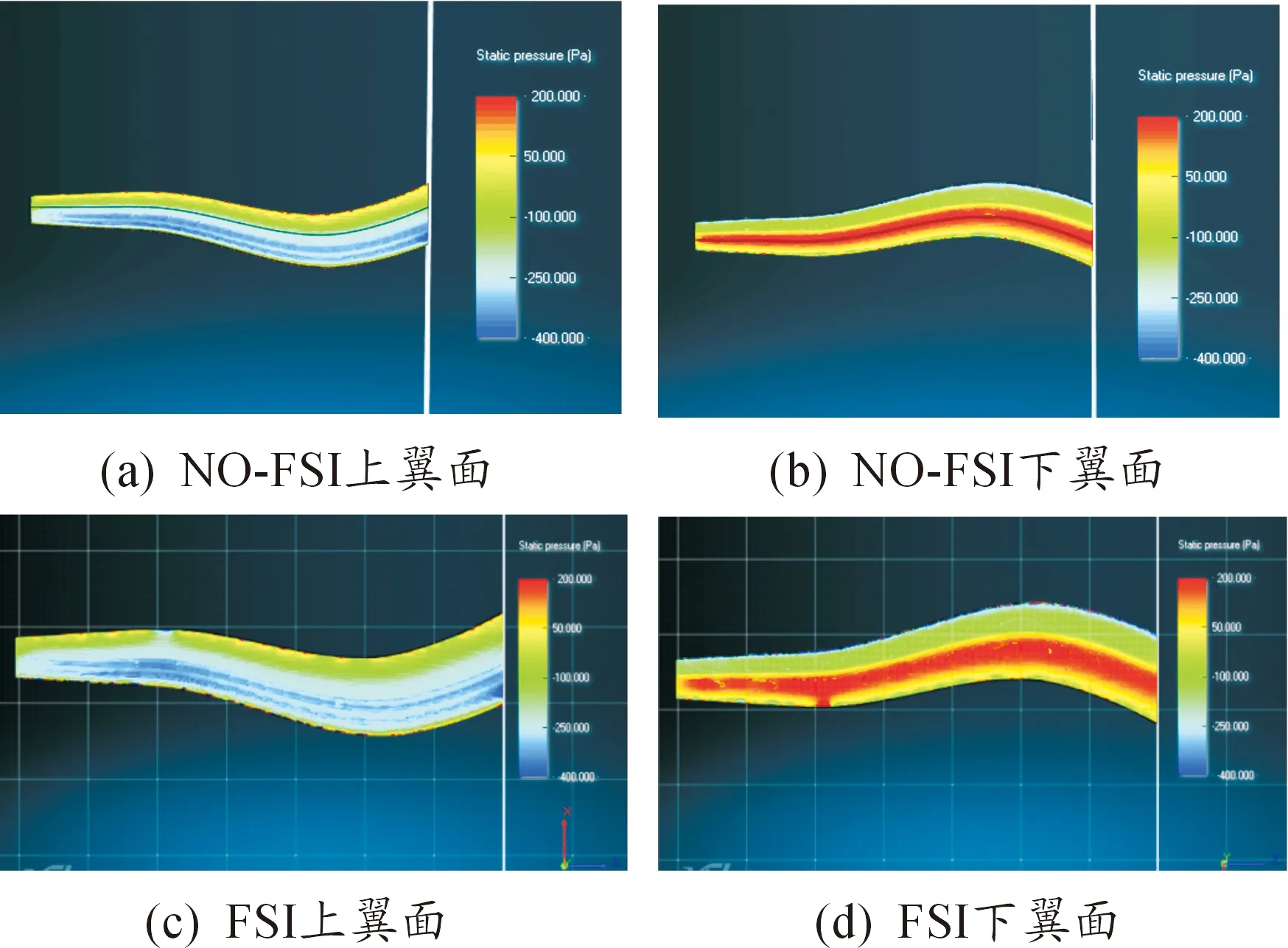
图8 V=30 m/s载荷下压力云图

图9 V=45 m/s载荷下压力云图

图10 V=55 m/s载荷下压力云图
由上图可知,两种算法下的翼面压力图有很多相似之处。当速度载荷增大时,下翼面的正压力值增大,上翼面的负压力值减小,因此上下翼面的压差增大,升力由此增大。在上翼面,从前缘到后缘,压力呈逐渐增大的趋势;而下翼面的压力值从前缘到后缘压力先增大后减小,升力的主要产生区是下翼面的后缘。
对比不同速度载荷下的FSI和NO-FSI翼面的压力云图,两者翼面压力分布的区域和大小类似,因此无耦合算法的升力值与流固耦合算法的升力值相差不大,介于最大升力和最小升力之间。但在V=30 m/s时,相比FSI,NO- FSI下翼面的压力分布更为均匀;V=55 m/s时FSI下翼面前缘的负压区面积增大,压力值降低,差距较为明显。
用流固耦合法分析气动弹性响应问题时,机翼扭转及弯曲使得机翼受到的气动载荷重新分布,机翼沿展向迎角发生改变,在机翼振荡的过程中,机翼周围流场产生了周期性改变[16]。机翼气动外形发生改变,使得初始设计出的机翼气动外形失效,引起升力偏差的同时增大机翼阻力,严重影响了飞行效率。因此对机翼流固耦合的研究有着重要的意义。
4 仿生机翼和标准机翼的流固耦合计算分析
构建大展弦比标准平直机翼,翼型采用NACA0417翼型,尺寸与大展弦比仿生机翼大小相同。将标准机翼进行1∶10缩放,机翼的形状和网格划分如图11所示。
图11 机翼网格划分
对大展弦比标准机翼在30 m/s速度载荷下进行流固耦合分析,计算环境与大展弦比仿生机翼流固耦合计算环境一致。
4.1 升阻力对比分析
对两种机翼在1 s内升阻比变化进行整理,如图12所示。
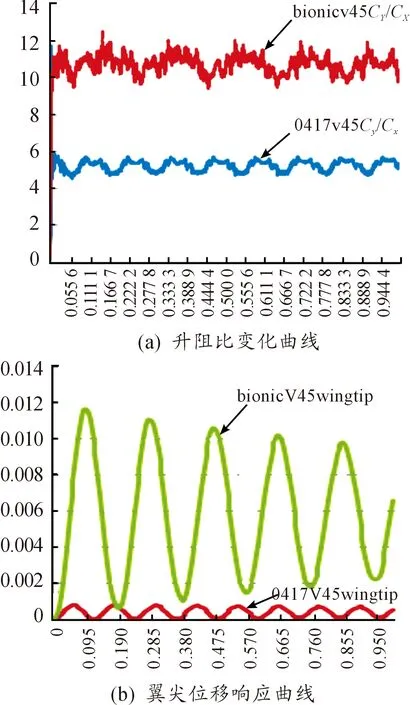
图12 1 s内升阻比变化及翼尖位移响应曲线
仿生机翼与标准机翼升阻比极值对应时间如表1所示。

表1 升阻比峰值时间点 s
通过翼尖响应曲线,两组机翼升阻比最大时,对应为机翼恢复原有构型时刻。升阻比最小时,对应为机翼最大上弯时刻。仿生机翼升阻比最小值为最大值的75.16%,标准机翼升阻比最小值为最大值的82.11%。相同速度载荷情况下,标准机翼最大升阻比为仿生机翼最大升阻比的46%。从翼尖位移响应曲线可以得出,仿生机翼翼尖响应衰减速度大于标准机翼。
为了分析出机翼在气动弹性响应过程中气动力变化的原因及仿生机翼构型优于标准机翼的原因,对两组机翼最大位移位置速度场、压力场、翼载荷、应力分布进行分析。
4.2 流场对比分析
标准机翼最大位移为0.000 824 92 m,发生在0.060 s,仿生机翼最大位移为0.011 7 m,发生在0.085 s,此时标准机翼升阻比仅为仿生机翼的42.6%,机翼最大变形时,仿生机翼与标准机翼上翼面速度图为图13所示。
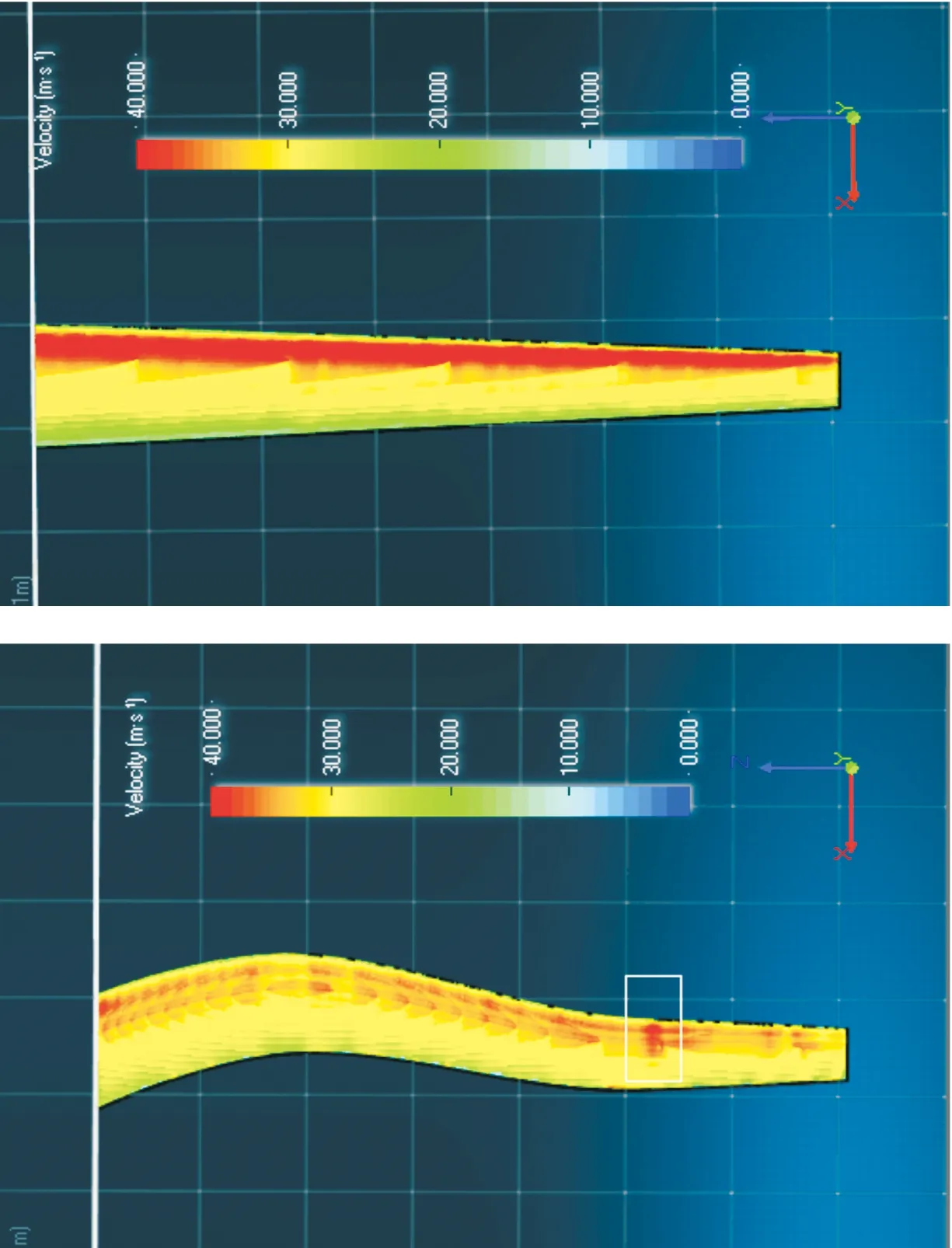
图13 上翼面速度分布图
从图中可以看出相对于标准机翼,仿生机翼前凸处产生沿展向速度,速度云图表明仿生构型使气流发生偏折,分别向翼根和翼尖流动。在机翼上弯时,在机翼翼展2/3处弯曲位置观察到明显的气流阻滞,说明了仿海鸥构型机翼对气动弹性弯曲的抑制作用。
观察两组机翼最大翼尖响应时上下表面压力分布,上翼面压力相近,仿生机翼下翼面静压显著大于标准机翼静压,仿生机翼上下表面压差更大,相同速度下提供了更大的升力。机翼弯曲时,在仿生机翼前凸处上下翼面压差最大为机翼主升力区,仿生翼型特征具有明显的增升作用。如图14所示。
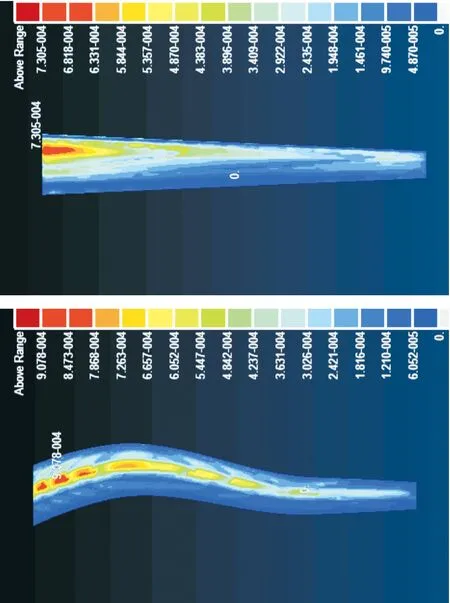
图14 机翼下表面静压云图
4.3 结构响应对比分析
在仿生机翼和标准机翼分别到达最大振幅时,根据机翼表面的外加载荷显示,仿生机翼受载荷面积更大,与上一节中流场分析结果一致。在最大弯曲位置时,标准机翼外载荷主要集中在翼根处,仿生机翼沿翼展方向受载面更大,提高了有效机翼面积。标准机翼最大载荷为仿生机翼的80.5%,如图15所示。

图15 机翼上表面载荷云图
在两组机翼分别到达最大翼尖响应时,应力云图显示仿生机翼所受应力相比标准机翼更加均匀,标准机翼应力分布为翼根处应力显著大于其他区域,机翼局部受力过大,容易产生疲劳断裂,仿生机翼展示了更好的构型优势。仿生机翼结构最大应力大于标准机翼结构最大应力,表明基于仿生构型的机翼结构设计有待进一步提高。如图16所示。
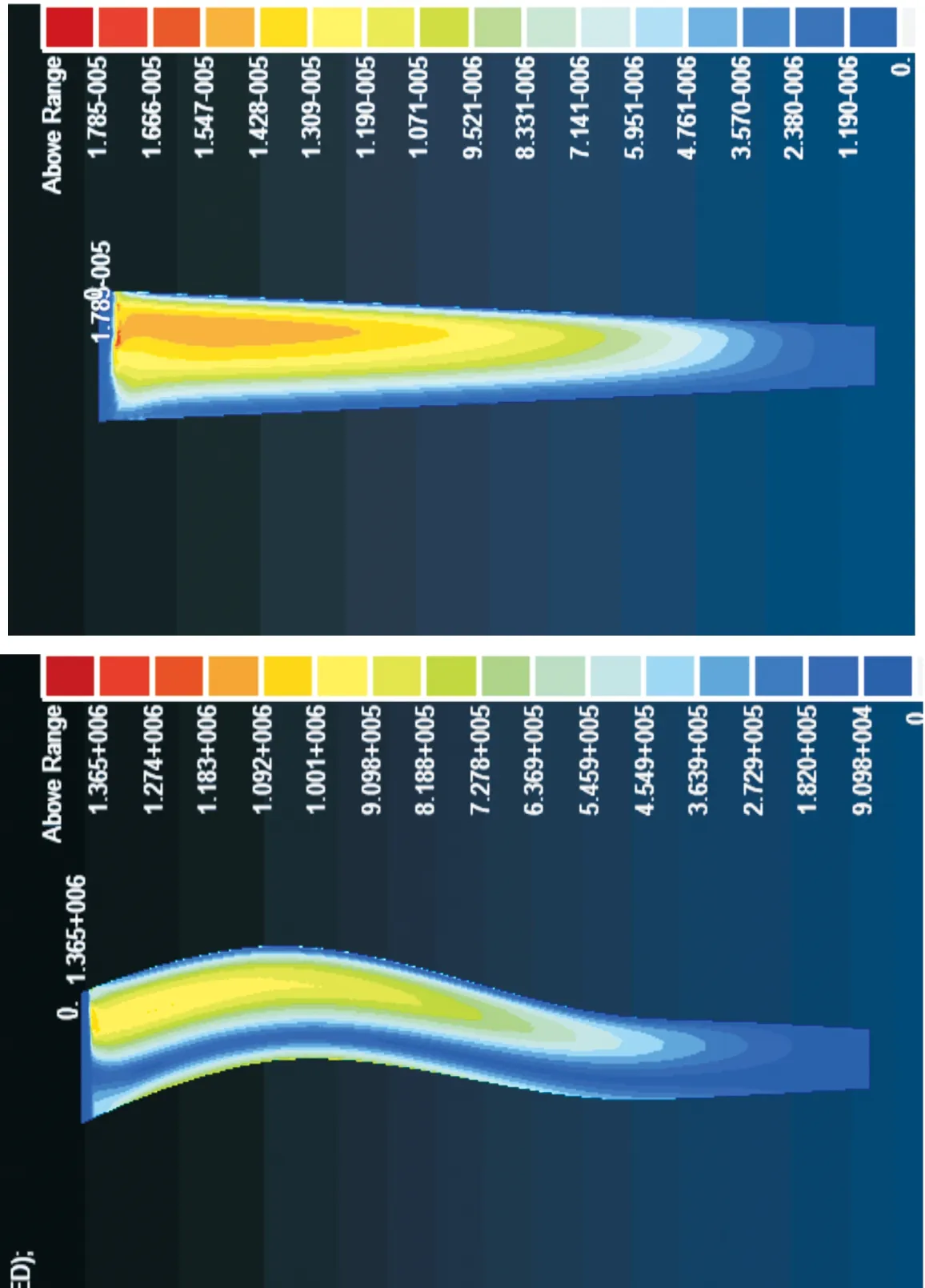
图16 机翼应力云图
综上所述,相比于标准机翼,仿生机翼有着更高的升阻比,为大展弦比机翼外形设计提供参考。仿生机翼上下翼面展向气流对翼尖绕流有着抑制作用,抑制机翼的弯曲变形。相比于标准机翼,仿生机翼表面的压力分布更加均匀,但是最大应力大于标准机翼,因此应对仿生机翼的内部进一步设计。
5 结论
1) 当来流速度增大时,仿生机翼上翼面压力减小、下翼面压力增大,上下翼面压差增大,升力、阻力增大。升力主要产生区在下翼面的后缘。
2) 相比于非耦合法,采用流固耦合法分析时,机翼的升力略有损失,阻力急剧增大,机翼产生了弯曲和扭转变形,使原有的气动性能失效,机翼结构破坏的可能性加大,影响飞行安全。
3) 在流固耦合分析时,相较于标准机翼,仿生机翼具有升阻比更大,抑制结构变形等优势,但其最大应力较大,还需要进行内部结构优化设计。
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
装备制造技术(2020年1期)2020-12-25 05:18:18
空间科学学报(2020年4期)2020-04-22 01:17:20
探测与控制学报(2018年3期)2018-07-09 12:43:20
纤维复合材料(2018年3期)2018-04-25 07:22:48
北京航空航天大学学报(2016年3期)2016-02-27 06:32:03
西北工业大学学报(2015年4期)2016-01-19 03:31:37
航空学报(2015年4期)2015-05-07 06:43:37
航空学报(2015年4期)2015-05-07 06:43:25
