
基于多传感器协同的自控小车避障系统研究
2020-08-04 11:23李全生
数码世界 2020年7期
李全生

摘要:本文针对自控小车的避障问题,提出了一种基于多传感器协同的自控小车避障系统。首先通过超声波传感器以及红外线传感器对小车与障碍物的距离及方向进行信息的采集,其次通过T-S模糊神经网络对数据进行融合处理,并得出避障路径,然后采用MATLAB仿真软件进行实验仿真,最后通过实验结果表明,系统在解决自控小车避障問题时具有有效性和可行性。
关键词:避障 传感器 模糊神经网络
1 引言
随着机器人技术的发展,自控小车的应用越来越广泛,一些比较危险并且不适合人类直接接触的场合都需要自控小车来完成。
近年来,传感器技术日益成熟,很多高端电子产品的核心技术都是传感器技术,随着传感器种类的增多,一个系统中往往配置了多种并多个传感器进行数据的采集,但是由于传感器的种类不同,所采集的数据也不是一个层次的,所以这些数据很难进行处理,因此想要使得多种传感器能够协同进行作业,必需要对这些数据进行信息融合,自控小车的传感器种类就不只一种,所以想要解决自控小车的多传感器协同作业,就必须实现自控小车传感器数据的信息融合。
本文针对当前自控小车的避障系统的研究,提出了一种基于多传感器协同的自控小车避障系统。首先通过超声波传感器以及红外线传感器对小车与障碍物的距离及方向进行信息的采集,其次对多传感器信息的融合结构进行了设计,并通过T-S模糊神经网络对数据进行融合处理,对输入量进行控制处理,得出相应的自控小车避障路径。
2 自控小车壁障系统
2.1硬件组成
本文所设计自控小车避障系统的硬件部分主要由控制器、传感器以及马达等组成,在控制器的选择上,使用的是单片机,马达使用的是小车自带的马达,驱动芯片从而完成小车的运转。
系统中通过使用超声波传感器来但对外界的信息进行采集,并采用红外传感器进行辅助工作,选择了超声波传感器以及红外线传感器,两种传感器一起工作,可以有效的进行优势互补。传感器的分布方式如下:一共采用了三组超声波传感器以及三组红外测距传感器,它们之间通过总线进行连接,自控小车的正前方以及左边右边分别配置了两个传感器,六个传感器就能将障碍物的范围进行覆盖。
2.2基于多传感器的数据融合
所谓的多个传感器协同作业,就是将多个传感器接收到的数据进行数据融合处理,由于这些传感器接收的数据类别是不一样的,因此这些数据的特征也是不一样的,这就意味着需要处理多个层次的数据,所以多个传感器的数据融合的核心任务就是将这些数据进行一定的评定,而这一过程要有特定的数据融合结构。
数据融合技术主要的信息数据融合结构有以下几种:
A.无反馈分布式融合。B.反馈分布式融合。C.集中式融合。
D.反馈并行融合。这种融合结构是基于上面三种融合结构的优点得来的,所以不论是局部还是整体,处理的精度都是非常高,缺点就是对于硬件的要求非常高,本文就采用了这种数据融合结构。
3 基于T -S 模型的模糊神经网络算法
3.1避障控制系统结构
想要通过传感器对外界的信息进行精准的判断,要建立一定的信息融合结构。本文结合模糊控制算法以及神经网络的优势,采用的是T-S模糊神经网络方法,首先要确定的是输入量,就是通过传感器获得的外界障碍物的距离方向数据,然后通过模糊逻辑对这些数据进行一定的模糊化,再通过神经网络对模糊逻辑进行决策,然后输出自控小车的行驶信息。
3.2模糊神经网络控制器的设计
本文所设计的系统对数据的精度要求并不是很高,非线性隶属度函数能够让输入与输出的曲面映射更平滑,可以使输出更精准,因此,本文控制器采用非线性隶属度函数作为隶属度函数,选择了隶属度函数。
自控小车的避障动作变化依靠的对前左右障碍物的距离以及实时速度信息的采集,通过控制器的处理,输出相应的转向角和加速度来完成自控小车的避障操作的。
4 自控小车避障系统的软件设计
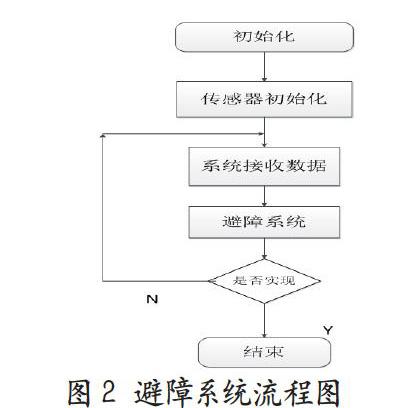
通过以上关于自控小车避障系统的研究,程序的主流程图, 如下图所示。
系统的软件设计过程中,通过软件来完成数据的滤波以及非线性补偿,这样能够使测量的数据的精度更高。软件实现的第一步是系统的初始化,之后是传感器的初始化,初始化完成之后,按照设定的速度让小车行驶,并开始采集数据,数据进行系统之后,便开始对这些采集到的数据进行信息融合,再通过避障算法进行避障操作,如果小车完成避障过程,那么程序结束,如果没有完成,那么系统就会进入到第三步进行循环。
5 Matlab仿真实验
在进行自控小车避障系统的仿真实验过程中,超声波传感器以及红外线传感器对障碍物的数据进行采集,然后将数据传输到仿真平台中,平台对数据进行处理后,再采用避障算法进行处理得到相应的避障路径,再将路径发送给自控小车,实现小车的避障行驶。
下面开始进行仿真实验,以验证本文算法的有效性。本文采用的是MATLAB仿真软件进行仿真实验。
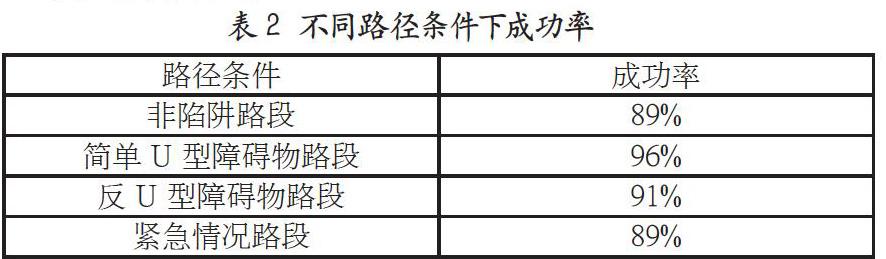
数据再通过模糊逻辑控制实现了信息融合之后,会通过模糊神经网络进行决策控制,自控小车在使用本文方法在不同路径条件下行驶100次,得出结果如下:
能够看的出来,基于模糊神经网络的数据融合算法的自控小车避障成功率很高。可以满足系统的需求。
6 总结
本文设计基于多传感器协同的自控小车避障系统,首先系统的整体结构进行了介绍,并详细讲解了硬件系统中超声波传感器以及红外线传感器,其次对多传感器信息的融合结构进行了设计,采用了T-S模糊神经网络对传感器采集到的信息进行融合处理并实现对自控小车的避障控制,最后通过仿真实验对系统的性能进行验证,结果证明基于T-S模糊神经网络信息融合在自控小车避障系统中具有有效性和可行性,这个算法能够适用于已知条件下,静态障碍的避障问题。
参考文献
[1]王耀南.多传感器信息融合及其应用综述[J].控制与决策.2001,16(5):518-522
[2]张桥.基于模糊神经网络的智能车辆避障方法研究[J].农业装备与车辆工程,2015,53(4):33-35.
[3]冯刘中.基于多传感器信息融合的移动机器人导航定位技术研究[D].成都:西南交通大学,2013.
[4]袁新娜,余红英超声波传感器在智能小车避障系统中的应用[J].绵阳师范学院学报.2009, 8(28):39-42.
[5]刘春化,程化强等.基于改进势场法的移动机器人避障路径规划化[J]东南大学学报,2009,39(1):16-20.
猜你喜欢
中国电子报(2019年54期)2019-10-24
时代英语·高一(2019年1期)2019-03-13
中国计算机报(2018年30期)2018-11-12
中学物理·初中(2017年8期)2018-03-06
中国新技术新产品(2017年2期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
电脑知识与技术(2016年17期)2016-07-23
电脑知识与技术(2016年12期)2016-06-14
新高考·高一物理(2015年5期)2015-08-18
