
基于卷积神经网络的横向转角预测方法
2020-08-03 08:05曾明如杨向文祝琴
现代电子技术 2020年6期
曾明如 杨向文 祝琴


摘 要: 由于智能小车探测周围环境的硬件设备的繁杂,将卷积神经网络与摄像头结合来探测周围环境越来越成为研究的热点。然而,单纯地使用卷积神经网络处理摄像头的数据来控制小车的转角,存在训练时间久、准确率不高的问题。针对上述问題,该文提出了将摄像头的数据经过无监督的二分K?means聚类方法之后,再将聚类结果作为卷积神经网络的输入,最终预测小车转角。实验结果证明,该网络结构可以有效地提高网络的训练速度,并提高网络的准确率。
关键词: 转角预测; 卷积神经网络; 数据处理; 周围环境探测; 网络训练; 结果分析
中图分类号: TN820.5?34; TP391.41 文献标识码: A 文章编号: 1004?373X(2020)06?0140?04
Method of lateral turning angle prediction based on CNN
ZENG Mingru, YANG Xiangwen, ZHU Qin
(School of Information Engineering, Nanchang University, Nanchang 330031, China)
Abstract: As the intelligent little vehicle′s hardware equipments for detecting the surrounding environment are too complex, it has become a research hotspot to combine convolutional neural network with camera to detect the surrounding environment. However, if the convolutional neural network is applied alone to process the data of the camera for the turning angle control of the little vehicle, the training time would be long and the accuracy would be low. Based on the above problems, the camera data is processed by means of the unsupervised binary k?means clustering method, and then the clustering result is taken as the input of the convolutional neural network, so as to predict the little vehicle′s turning angle. The Experiment results show that the network structure can effectively improve the training speed and accuracy of the network.
Keywords: turning angle prediction; convolutional neural network; data processing; surrounding environment detection; network training; result analysis
0 引 言
计算机技术和人工智能的发展使得车辆的自动驾驶受到越来越多的关注,其中车辆的横向控制系统是自动驾驶中一个重要组成部分。在车辆的横向控制中主要分为两个阶段:获得车辆外界的复杂环境信息;对信息处理分析之后判断下一时刻车辆的前轮转角。
传统的智能小车的横向控制系统,都是通过超声波、雷达、红外线等多种传感器结合的方法收集信息,建立模糊控制规则从而预测车辆的前轮转角实现避障[1]。多种传感器的结合使用,是为了小车探测复杂的环境来预测下一时刻的转角。但随着计算机和人工智能的发展,卷积神经网络在复杂图像环境下表现出非常好的容错性和鲁棒性[2]。因此利用卷积神经网络和摄像头结合来处理车辆外界的复杂环境信息成为一种新的可行方法,该方法相较于传统的方法避免了使用冗余的硬件设备,并且具有更好的适应复杂环境的能力[3]。但同时由于传统的卷积神经网络采用有监督学习的训练方法,存在的主要问题是需要训练的参数数量太多,参数不易学习到最优值,容易出现过拟合问题[4]。因此该文设计的网络结构采用无监督的二分K?means与卷积神经网络(CNN)相结合的方法,相较于传统的卷积神经网络可以减少所需要训练的参数,消除了梯度弥散的问题[5]。
1 基于二分K?means的卷积神经网络的小车横向转角预测方法
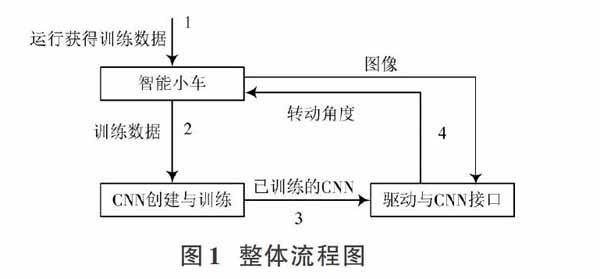
1.1 小车横向控制
小车横向控制在该文中分为图像获取、图像预处理、CNN模型建立、预测角度等部分。整体流程如图1所示。
1.2 建立数据集
在小车前端的前部、左部和右部各预装一个摄像头,然后人为控制小车运动避障,从上位机获取3个摄像头的图像数据。将3个摄像头的数据,依次分为前、左、右三个部分。同时通过一个可调电阻将舵机转角转换为数字信号,再从上位机将数字信号转换为小车前轮转动的角度。
在数据采集的过程中为了确保数据集在多种复杂情形下的有效性,数据的采集应满足如下要求:
1) 为了避免光照、天气等因素对摄像头的影响,应该在同一环境的不同光照和天气下,进行数据集的采集。
2) 为了避免过多异常量的产生,在相同环境下尽量保持与原先相似的转角,尽量避免与原先偏差过大的转角出现。在满足上述条件的情况下,该文采集了小车的前、左、右三个位置各400余张图像。
1.3 数据集的预处理
为了确保图像数量足够来防止过拟合等情况的发生,该文通过对原始图像、加入高斯噪声和椒盐噪声等方式对数据集进行扩增,最终得到3个位置各1 400余张,总计4 200余张图像的数据集[6?7],如图2所示。
由于转角是由数字信号转换过来的,因此转角在时间上的变化不是平滑的。为了平滑数据,该文选取一个移动平均值,以3个时间单位(0.3 s)为窗口来计算该平均值[8]。图3是随时间变化的原始数据和平滑之后的数据的对比图。
1.4 基于二分K?means的卷积神经网络模型的建立
1.4.1 网络结构
用于小车横向转角预测系统的改进卷积神经网络结构如图4所示,共有1个K?means层、3个普通卷积层、2个全连接层和2个Dropout层等。其中3个卷积层和2个全连接层是可训练的层,卷积层的高度和宽度随着网络结构深度的增加而减小,最后一层的全连接层的输出节点为1。在全连接层的前面,加入Dropout层来提高网络的泛化能力,防止出现过拟合。
1.4.2 输入层
预处理后的图像像素为160[×]320,将预处理后的前、左、右三个位置的图像作为输入层的输入,目的是尽可能地保留车辆各个位置的图像信息。
1.4.3 二分K?means层
传统的卷积神经网络在图像识别中应用时需要庞大的数据集进行训练,且容易出现过拟合问题,由此想到先对图片进行聚类处理。而经典的K?means聚类算法受初始聚类中心影响较大,容易收敛于局部最小值,故采用的是二分K?means算法[9]。采用二分K?means算法能够减小训练的开销量,克服数据集分布不均所产生的局部最优问题,聚类效果较好[10]。将前、左、右三个位置的图像依次通过二分K?means层,并将得到的k个聚类结果作为下一层的输入。该文设计的二分K?means层的k值设置为3。
1.4.4 卷积层
卷积层通过卷积计算提取出输入图像的特征,本文设计的网络结构具有3个卷积层,每个卷积层随着网络深度的增加依次减小。其中第一个卷积层有16个filter,每个filter的大小为8[×]8[×]3,步长为4;第二个卷积层有32个filter,每个filter的大小为5[×]5[×]3,步长为2;第三个卷积层有64个filter,每个filter大小为5[×]5[×]2,步长为2。在卷积计算中的激活函数有很多种,其中Sigmoid函数最常用,也可以是修正线性单元(ReLu),此处采用的修正线性单元是为了加快网络的训练速度,减少网络的计算时间[11]。
式中:[w]为连接权值;[a]为前一层的输出。
1.4.5 输出层
该网络结构的输出层为全连接层,其中该全连接层的输出节点为1。为了避免出现过拟合,该全连接层的前面加入了Dropout层,该Dropout层的Dropout率为0.5。在该网络结构的另一个全连接层中也加入一个Dropout率为0.2的Dropout层。
1.4.6 模型的训练
二分K?means的训练过程如下:
1) 将输入图像的所有点作为一个簇,然后将簇一分为二,选择其中一个簇继续进行划分,选择哪一个簇进行划分取决于对其划分是否可以最大程度降低误差平方和(SSE),基于误差平方和的划分过程不断重复,直到得到指定的簇数目[12]。
式中:[wi]表示权值;[y*]表示该簇所有点的平均值。
2) 利用划分出来的簇运行标准的K?means算法。
卷积神经网络结构的输出层采用的目标函数为:
式中:[x]为二分K?means处理后的数据;[w]为卷积神经网络各层的权值;[f]为车辆预测转角;[y]为输入数据的小车真实转角。然后使用误差反向传播和梯度下降方法对权值进行调节,公式如下:
2 实验结果与分析
基于二分K?means的卷积神经网络与传统卷积神经网络的训练结果如图5所示,准确率对比结果如图6所示。
神经网络的训练结果比较
从图5可以看出,虽然两个网络最终都趋于收敛,但是只使用卷积神经网络来进行角度预测的话,需要更多的迭代次数才能逐渐趋于收敛。如果加上二分K?means的卷积网络,则可以更快地确定图像的类别,从而只需要更少的迭代次数。
神经网络的准确率比较
从图6可以看出,两种网络结构的識别率随着测试图片数量的增多而升高,但是相较于传统的卷积神经网络,结合二分K?means的卷积神经网络的识别率相对更高一些。
3 结 语
本文在传统卷积神经网络上加上了二分K?means聚类方法进行优化,并在智能小车摄像头采集的图像数据上进行了验证。改进的卷积神经网络采用二分K?means聚类方法先进行聚类学习,使卷积神经网络获得更丰富的输入信息,从而减少卷积神经网络所需训练的参数,加快网络的训练速度并提高训练准确度。实验结果表明,改进后的卷积神经网络模型相较于传统的卷积神经网络具有更快的训练速度和更高的准确度。
参考文献
[1] 申永红.基于模糊控制算法的智能小车避障系统设计[J].小型内燃机与车辆技术,2018,47(6):33?37.
[2] OQUAB Maxime, BOTTOU Leon, LAPTEV Ivan, et al. Learning and transferring mid?level image representations using convolutional neural networks [C]// IEEE Conference on Computer Vision and Pattern Recognition. Columbus: IEEE, 2014: 1717?1724.
[3] NAMEIRAKPAM D, YABEM J C, KUMATHEM M S. Image segmentation using k?means clustering algorithm and subtractive clustering algorithm [J]. Procedia computer science, 2015, 54: 764?771.
[4] 周飞燕,金林鹏,董军.卷积神经网络研究综述[J].计算机学报,2017,40(6):1229?1251.
[5] ZHAO H, GALLO O, FROSIO I, et al. Loss functions for image restoration with neural networks [J]. IEEE transactions on computational imaging, 2017, 3(1): 47?57.
[6] 秦晓伟,郭建中.K?SVD算法的超声图像加性噪声去噪研究[J].陕西师范大学学报(自然科学版),2012,40(6):42?46.
[7] 张绪光.图像去噪处理技术研究[J].净月学刊,2014(6):52?54.
[8] 冯兴辉,张旭,陈礼贵,等.直线特征测量数据的平滑去噪[J].机械制造,2015,53(4):71?72.
[9] 卜天然.基于初始中心点K均值聚类算法的改进方法研究[J].通化师范学院学报,2017,38(2):60?63.
[10] 吴金李,张建明.基于二分K?means的协同过滤推荐算法[J].软件导刊,2017,16(1):26?29.
[11] 田娟,李英祥,李彤岩.激活函数在卷积神经网络中的对比研究[J].计算机系统应用,2018,27(7):43?49.
[12] 陈贤宇,李有强,吕苗苗,等.基于二分法的K?means算法的实现[J].无线电通信技术,2017,43(6):37?40.
猜你喜欢
心理学报(2022年4期)2022-04-12
水泵技术(2021年3期)2021-08-14
计算机应用(2016年12期)2017-01-13
绿色科技(2016年21期)2016-12-27
软件导刊(2016年9期)2016-11-07
软件工程(2016年8期)2016-10-25
科技视界(2016年24期)2016-10-11
科教导刊·电子版(2016年18期)2016-07-18
电脑知识与技术(2016年10期)2016-06-16
科技视界(2016年2期)2016-03-30
