
一种高压线异物检测算法
2020-08-03 07:58张凡范亚雷刘文达蔡涛
现代电子技术 2020年8期
张凡 范亚雷 刘文达 蔡涛

摘 要: 高压线路异物缠绕极易引发区域大面积停电,导致停运事故,智能异物检测算法是未来智能电力巡检系统的关键模块之一。通过整理近年人工处理高压线异物时备案的原始图片数据,对数据进行规范化处理和人工标注,建立“高压线异物检测数据集”,研究一种高压线异物检测算法,该算法基于SSD模型,并有針对性地对数据集使用K?means聚类的方法获取先验框参数,以此替代默认值。实验结果在测试集上的平均准确率为86.69%,定位准确率为69.2%,表明所提算法可有效地对高压线上的异物进行检测和定位。
关键词: 异物检测; 高压线; 数据集构建; 参数设置; 模型训练; 结果分析
中图分类号: TN345?34; TP391.4 文献标识码: A 文章编号: 1004?373X(2020)08?0036?05
High?voltage line foreign object detection algorithm
ZHANG Fan1,2, FAN Yalei2,3, LIU Wenda2,3, CAI Tao2,3
(1. Hubei Collaborative Innovation Center for High?Efficiency Utilization of Solar Energy, Hubei University of Technology, Wuhan 430068, China;
2. Hubei Power Grid Intelligent Control and Equipment Engineering Technology Research Center, Hubei University of Technology, Wuhan 430068, China;
3. Hubei Key Laboratory for High?Efficiency Utilization of Solar Energy and Operation Control of Energy Storage, Hubei University of Technology, Wuhan 430068, China)
Abstract: The high?voltage line foreign object winding is easy to cause large?area regional blackout, resulting in the outage accidents. The intelligent foreign object detection algorithm is one of the key modules of the future intelligent power inspection system. The original picture data recorded in the manual processing of high?voltage line foreign objects in recent years is arranged, which is normalized and labeled manually, and the "high?voltage line foreign object detection data set" is established. A high?voltage line foreign object detection algorithm is studied. The algorithm is based on the SSD model, and the K?means clustering method is used to obtain the prior box parameters of the data set, so as to replace the default value. The average accuracy of the experimental results on the testing set is 86.69%, and the positioning accuracy is 69.2%. The algorithm can detect and locate foreign objects on the high?voltage line effectively.
Keywords: foreign object detection; high?voltage line; construct database; model training; result analysis
0 引 言
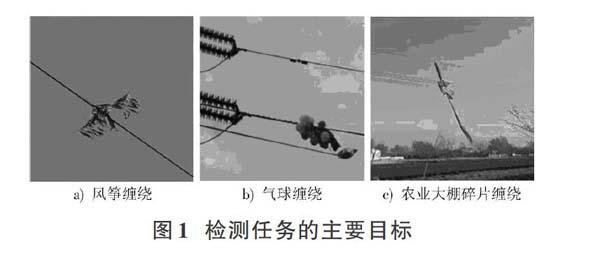
变电站和高压走廊是电力网中重要的组成部分,我国的电力设施多分布在人烟较少的郊区和植被茂密的农村地带,电力电缆和高压铁塔安置在这些地区难免会受到“异物”侵扰。一般常见的电力设备异物缠绕多是由风筝缠绕、气球缠绕、条幅缠绕以及农业大棚碎片缠绕引起。若是在大风天气或者多雨的潮湿气候下,塑料布被风吹起造成两股高压线缠绕,缠绕在高压电线上的风筝线因雨水导电造成短路事故,引发跳闸停电事故并损坏设备。更严重的是,异物缠绕造成电力设备对地放电距离缩减,极易对经过电力设备底下的行人造成电击伤害。根据统计,近年来由于外部因素所导致的电力线路跳闸或者故障停运的事故呈现逐年递增的势态。截止2015年,国家电网公司330 kV及以上输电线路外力破坏占总故障跳闸的15.8%,而异物短路占外破跳闸总数[1]的55.4%。可见对于异物检测技术的需求已经迫在眉睫。目前我国大部分地区还是采用传统的人工巡检方式,主要是巡检人员通过步行或者骑行的方式沿输电线路巡视,检测工具则大多依靠人眼直接观察、佩戴望远镜等。但是,由于巡检时间过长、巡检设备较多和巡检路线大多崎岖难行等因素的综合,极易使得巡检人员产生疲累、厌倦的负面情绪,因而漏检的状况时有发生。根据中国电科院的统计显示,每年由于漏检造成的直接经济损失[2]都要超过26亿元。可以预见,为了跟上当下社会对电力系统的发展需求,为了保证优质的供电质量确保电力设施安全可靠运行,使用智能巡检来代替传统的人工巡检已经成为发展趋势。智能巡检设备主要以搭载摄像头的无人机或巡检车为主,按照设定好的巡检路线对沿途电力设备进行图像采集。通过对采集到的图像进行处理,进而判断图像中是否存在异物缠绕的情况,当检测到异物时及时通知维护人员前来清除,保护电力设备运行。经典的目标检测算法是背景差法和帧差法。其中背景差法更适合在摄像角度固定的监控摄像设备上使用,这并不符合巡检移动时背景不断变化场景中的应用;而帧差法则是先建立检测线路的背景模板,通过实时采样的图像与背景模板逐一比较从而得到结果。但是,即使巡检设备每次的检查点相同,巡检设备的摄像头也难以保证航向角和云台角度与模板视角一致,这些差异极易被算法判断为变化的前景异物,从而产生误判[3]。综上可知,传统方法的缺陷在于无法克服尺度、平移和旋转对检测任务的影响。尺度不变特征转换(Scale Invariant Feature Transform,SIFT)是一种局部特征描述子,可在图像中检测出关键点,因此对尺度、平移和旋转甚至亮度变化保持不变性,对于采样视角的变化也有一定程度的稳定性。但是此方法需要建立待测区域的模板图像库,当场景变化就需要将建立库的工作重复一次,不具备良好的适应性。
依赖于计算机视觉的发展和深度学习在目标检测领域的应用发展。目前图像目标检测方法主要分为两类:基于候选框的R?CNN[4],Faster R?CNN[5];基于回归方法的YOLO(You Only Look Once)[6],SSD(Single Shot MultiBox Detector)[7]等。其中主要用到深度神经网络模型都是卷积神经网络(Convolutional Neural Network, CNN)。本文选择在TensorFlow平台上实现SSD算法完成异物检测任务,首先为此建立专用于异物检测的“高压线异物检测数据集”;然后在训练数据集上用K?means聚类得到的参数设置先验框的宽高比;接着在预训练模型上利用迁移学习和微调的方式实现异物检测网络;最后给出在不同的先验框的宽高比参数设置下异物缠绕的检测定位对比结果。
1 数据集的构建
目前用于目标识别和检测赛事的通用数据集图片都整理成较为清晰、拍摄角度相对固定的图片。与此不同的是,特定的目标检测任务的数据集构建需要从零开始,人工对图片进行筛选,使其能更好地契合深度学习网络的学习规律。
1.1 原始数据的筛选
首先,整理近年来人工清除高压设备上异物缠绕的备案图片,获取原始数据,这部分工作主要是依赖人工筛选。
1) 将风筝缠绕、气球缠绕、条幅缠绕以及农业大棚碎片缠绕这类频繁引发停运事故的图片作为整理收集工作的主要目标,如图1所示。
2) 对同一异物,选取不同的拍摄角度、不同的远近景采集到的图片。多种方位的采集有助于在训练网络时减少过拟合现象,如图2所示。
3) 在同一类高压电气设备上,对于不同的缠绕异物进行整理,如图3所示。
4) 巡检任务大多是全天候执行,为了提高算法对不同光照强度下异物检测的泛化能力,对不同时段、不同天气环境下采集到的图片进行整理,如图4所示。
1.2 原始数据的规范化
因为原始图片是从不同的记录设备上整理得到,图片的命名和格式各不相同,在此需要统一图片名称并且将所有的图片格式都转换成“.jpg”格式。同时对图片的名字进行重命名,统一规定为从“000001”开始的6位数序号排序,结果如图5所示。
在完成以上初步处理之后,针对不同设备所采集到的图片存在大小差异明显、像素过大导致算法读入数据缓慢等问题,进一步对图片的宽度做规范化处理。统一以宽度500像素作为规范的标准大小,仅在单一的度量方向上规范化,避免原图中宽高比为1∶2和2∶1的长方形图片在某个特定方向上压缩变形,从而导致图像中的目标物失真,目标的特征失去准确性。
1.3 数据集的标注和格式转换
对以上处理后的原始图片进行人工标注,进而生成“.xml”文件,标注工具选择Labelimg软件。对图片中出现的风筝缠绕、气球缠绕、条幅缠绕以及农业大棚碎片缠绕统一用“foreignobj”标签标注,如图6所示。
最终整理标记图片357张,其中285张划分为训练和验证集,72张划分为测试集。并且生成数据划分文件:测试集“test.txt”、 训练集“train.txt”、 训练和验证集“trainval.txt”、 验证集“val.txt”。按照PASCAL VOC(The PASCAL Visual Object Classes)数据集的数据存放结构完成最终数据集的建立。将“.xml”文件放进“Annotations”,“.jpg”文件放进“JPEGImages”,“.txt”文件放进“ImageSets\Main”。最后进行数据格式转换,将训练集和测试集的每张图片对应的“.xml”格式文件转换为更符合TensorFlow处理的二进制数据编码方案,即TFRecord格式文件[8]。
2 使用K?means聚类结果设置先验框默认参数
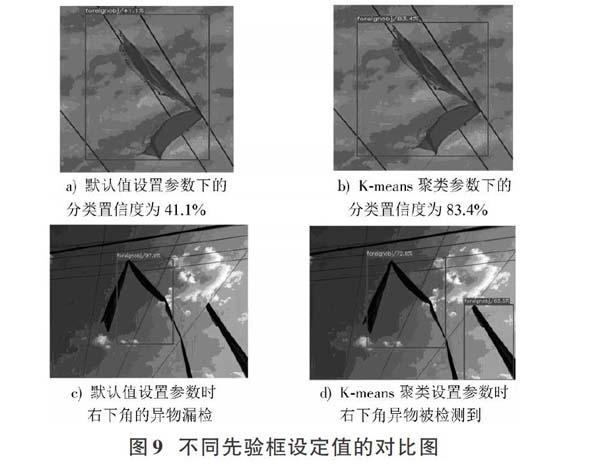
SSD算法采用在不同大小的特征图上预先按照一定的宽高比设置先验框参数。如图7所示,在浅层特征图上更容易发现小目标,而深层的特征图则负责检测大目标。在SSD原始算法中,先验框的宽高比参数默认设置为{1,2,3,1/2,1/3}。但是在特定场景下,如异物检测任务中,异物的宽高比会呈现较大的数值,虽然SSD网络可以通过学习适当的调整边界,但若是为网络选择更好的先验框,可以使网络更容易学习以便预测更好的预测框[9]。
SSD的预测框是通过对预测值解码得到的,解码过程即式(1),可以观察到预测值[l]直接影响预测框位置,式(1)决定整个预测框中心水平或者竖直偏移。预测偏移值[l]应该是向由式(2)编码得到的偏移值[g∧]靠近,因此选取更加合适的先验框尺寸可以使得计算出的真实偏移值不会有太大的波动,而是在一个较小的范围内变化,预测值更容易得到好的结果。
式中:[bcx],[bcy]是预测框的中心坐标;[dcx],[dcy]是先验框的中心坐标;[gcx],[gcy]是标注框的中心坐标;[lcx],[lcy]是算法预测值;[g∧cx],[g∧cy]是标注框与先验框间的偏移量。
通过K?means聚类得到的5类结果,聚类中心的数值为:0.57,1.35,2.39,4.6,6.2。分析數值规律可以发现,异物的形状还是以1∶1,1∶2和2∶1为主,不同于通用数据集的是多了一些宽高比为4.6和6.2的形状,这表明横向跨度较大的目标也存在于训练集中。
3 异物检测模型训练
3.1 深度学习开发环境的配置
在Windows系统下搭建TensorFlow?gpu平台,配置CUDA 9.1,cuDNN 7.0,Python 3.6软件环境。计算机的硬件配置:CPU为InterIntel 酷睿i7?8700,内存容量8 GB,GPU为NVIDIA GeForce GTX 1060。
猜你喜欢
躬耕(2020年2期)2020-03-16
绿色科技(2016年21期)2016-12-27
电脑知识与技术(2016年22期)2016-10-31
科技视界(2016年24期)2016-10-11
科教导刊·电子版(2016年18期)2016-07-18
科技视界(2016年2期)2016-03-30
火控雷达技术(2016年2期)2016-02-06
科技与创新(2015年23期)2015-12-08
江西通信科技(2015年3期)2015-12-05
山西大同大学学报(自然科学版)(2014年6期)2014-01-23
