基于STM32的简易静力触探采集系统设计
2020-08-03 05:47张煜葵
计算机测量与控制 2020年7期
张煜葵,吴 涛,周 颖,高 嘉
(中国地质大学(武汉) 自动化学院,武汉 430074)
0 引言
随着基础建设的进程不断加快,地质勘探和岩土分析的需求不断上升。虽然社会基础建设能力处于领先地位,但地质勘探和岩土分析技术较为落后,缺乏创新。岩体分析过程主要存在设备扰动大、执行效率低、测量结果不准确、人工成本高,成套设施不完善等弊端。为此,本文将设计研究基于STM32芯片[1-2]的静力触探采集系统来改善这些不足。
静力触探实验(cone penetration test, CPT)是将一定规格的圆锥形探头借助机械或液压设备按照一定的速率(一般为2 cm/s)匀速贯入土中,并测量锥尖阻力qc,侧壁摩擦力fs和孔隙水压力u2随深度变化的一项非常重要的原位测试方法[3-4]。本文设计研究了一个多功能静力触探数据采集系统,其结构设计紧密合理、电路设计安全可靠、测试精度高、重复性好。此外,系统有效降低了勘探成本,为土木工程和地质工程勘探实践提供了强有力的测试工具。
1 土类划分原理
静力触探划分土层和土类的方法主要有3种:目测经验法、统计分析法和分类图法。其中最常用的是分类图法。分类图法采用双桥探头。当探测过程中遇到相同的锥尖阻力,可以再用侧壁摩擦力加以区分土类,因为不同土的锥尖阻力相同时,侧壁摩擦力会不同;反之侧壁摩擦力相同时,锥尖阻力不同。触探参数与土类的关系受多种因素的相互制约,使触探参数交替重叠,但在复杂的关系中还是可以找出主要的趋势和规律。此时,摩阻比是一个很重要的判别值,用它不但可以划分出粘性土和砂类土这两大类,还可以划分出两大类之间的过渡带即粉土等,表1是常用的划分依据。可以看出,根据摩阻比划分时,土类有交叉部分,此时,需结合模糊数学建立模糊元素阵,构造权重矩阵,计算出不同土壤类的比重。
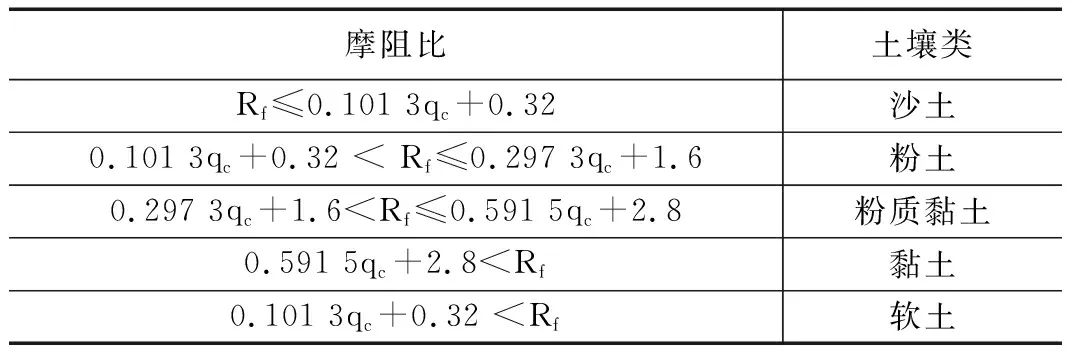
表1 土类划分依据
2 系统总体架构和思路
静力触探采集系统由静力触探探头、打压设备、基带板、上位机4个部分组成[5-6]。静力触探探头内部装有若干传感器来采集相关数据(传感器部分),打压设备提供探头贯入土壤中所需要的力,基带板将静力触探探头采集到的模拟信号转换为数字信号(数模转换部分),上位机(中央处理器与接口部分)则与基带板进行通讯,将采集到的数据显示、分析和存储。本文重点研究基带板与上位机的协同工作。其中所涉及的硬件总体框架如图1所示。
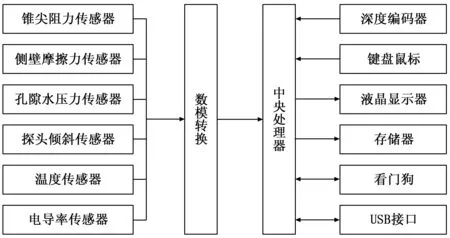
图1 硬件总体框架图
3 基带板设计和研发
基带板主要完成传感器信号采集、数据存储、监测探头倾斜、解析上位机指令和提供实时时钟信号这5个功能。为了使硬件系统灵活可靠,并且便于扩展和维护,我们采用了模块化设计,将各个模块通过MCU(Microcontroller Unit-微型控制单元)联系在一起。为了保证多个传感器能同时完成多个数据的采集、存储、传输和通讯,主控芯片需要选择主频高,有内置存储单元的芯片。本文选择了有较好性能的STM32F103芯片和一些外围芯片构成基带板。基带板的整体设计如图2所示。

图2 基带板整体设计
基带板系统主要包括以下几个模块:MCU、AD7799采集电路、电源电路、RS485、FLASH、ADLX345、DS3231和DS18B20。MCU类比于整个系统的大脑,负责系统整体协调运行。AD7799采集电路是整个系统的核心,负责传感器数据的采集与处理。电源电路是系统的心脏,将输入电压转化为5 V电压和3.3 V电压以供各个芯片正常工作。通讯部分我们采用RS485协议,负责下位机与上位机实时通讯。FLASH负责存储采集到的数据。ADLX345负责采集探头的倾斜角度。DS3231负责提供实时时钟。DS18B20负责采集土壤温度,且后期可对静探温度数据进行温差补偿校正。基带板整体工作软件流程如图3所示。
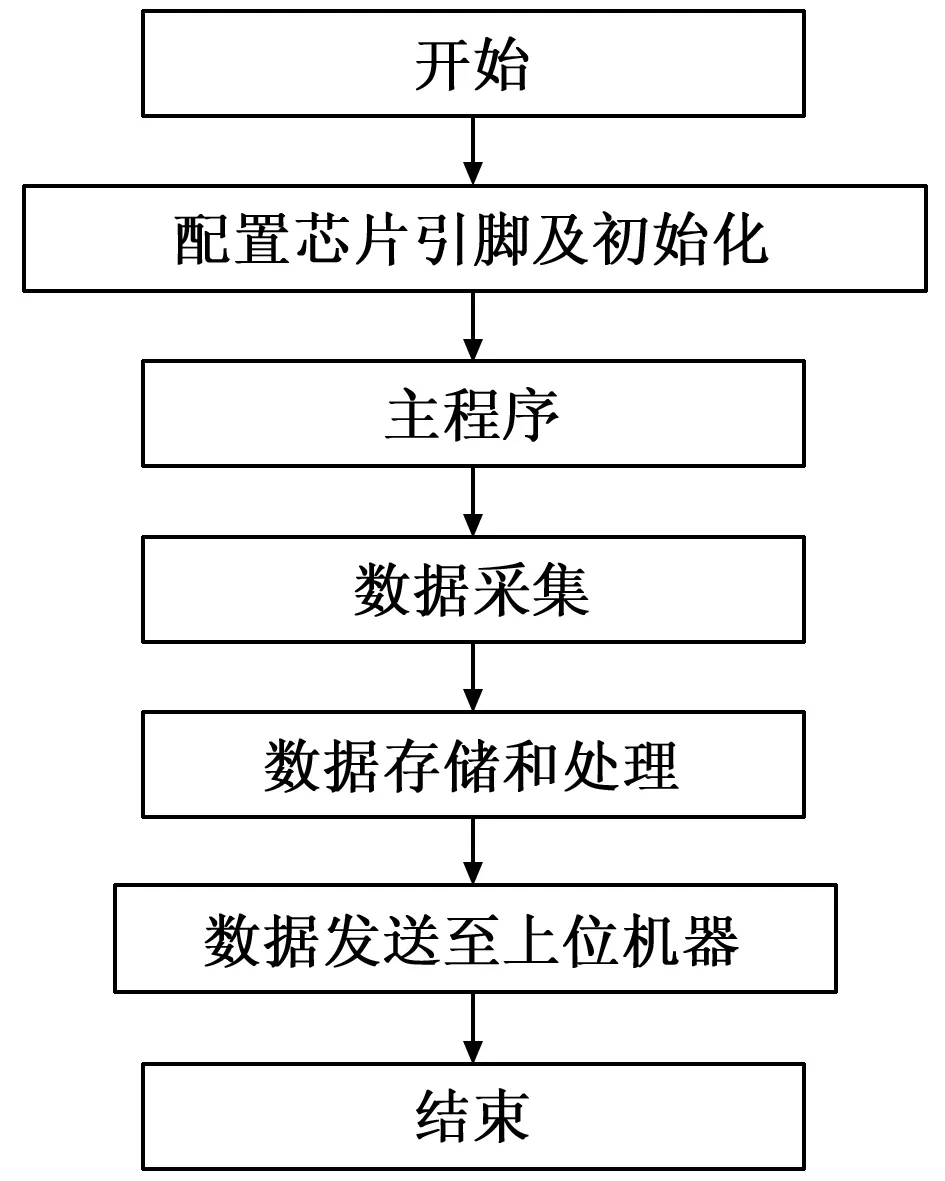
图3 基带板整体工作软件流程图
3.1 数据采集模块设计
数据采集部分是整个系统的核心,数据采集的精度直接决定了整个实验的效果。对于数据采集芯片,我们选择低功耗、低噪音、高精度的AD采样芯片AD7799。AD7799芯片内部主要由AD转换器、时钟产生器、串行通信等模块构成[7]。我们选用了ADR4525基准压芯片作为AD7799的基准源,该芯片的误差在±0.02%范围内。AD7799和ADR4525的硬件电路图分别如图4和图5所示。在数据采样过程中,为了提高采样结果精度,将每一路数据分别采集15次,然后进行中值滤波[8]操作。经过分析,得到有效数据的时间间隔为0.4 s。
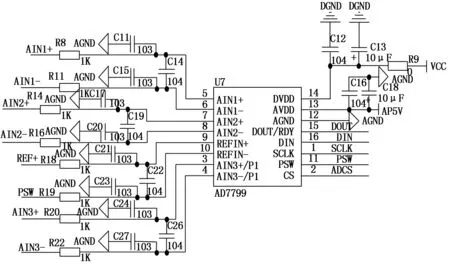
图4 AD7799外围电路图
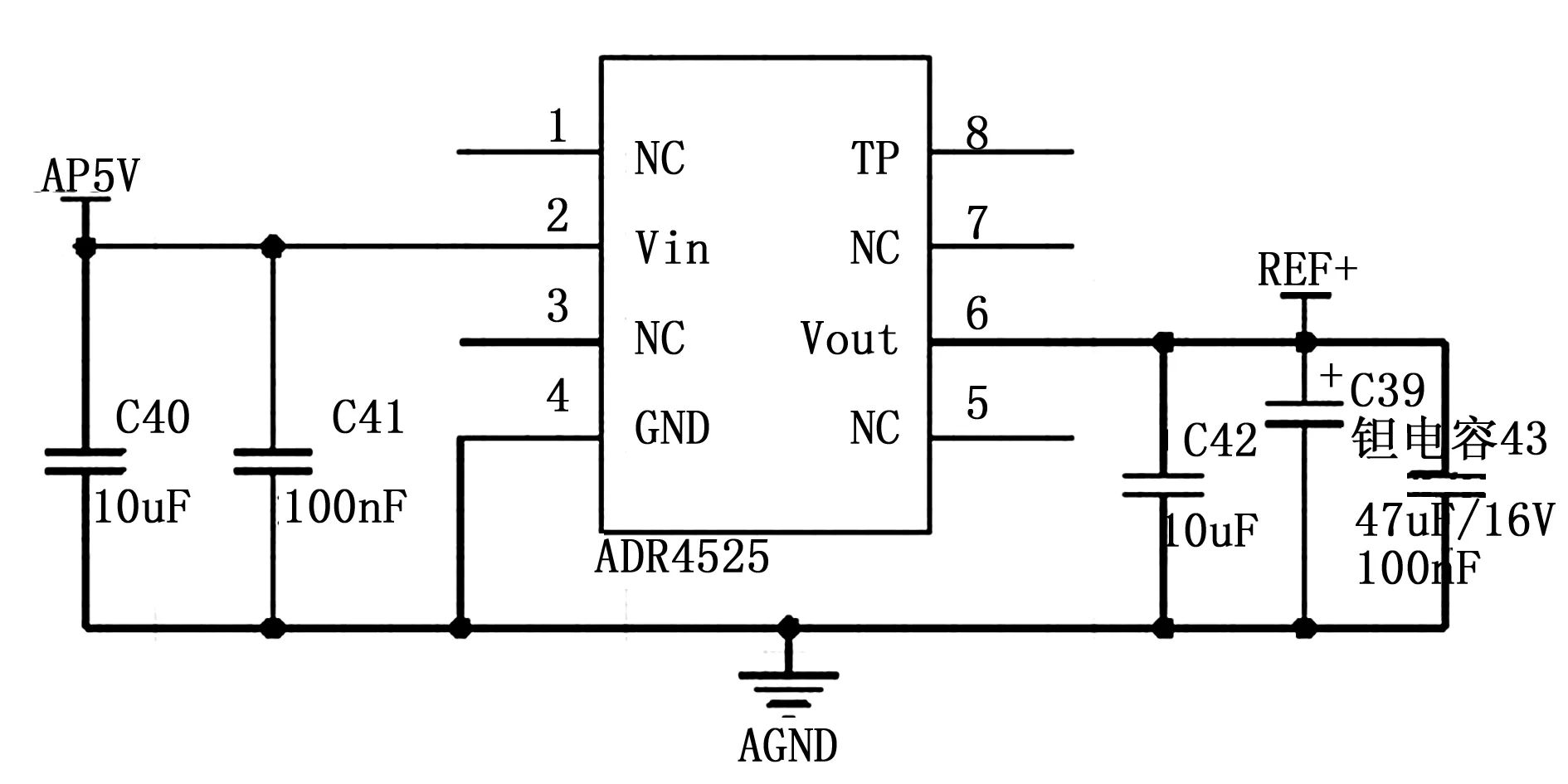
图5 ADR4525外围电路图
3.2 数据存储模块设计
静力触探系统在进行数据采集时,数据不经过上位机,先存储在本地存储器介质中。由于静力触探系统探头内管直径较小,电路板设计宽度需小于12 mm。并且数据存储不采用SD卡的方式,那么我们选用外部FLASH芯片W25Q128。W25Q128芯片具有16 Mbyte的存储空间,编程/擦除次数可超过100 000次。经过测试,W25Q128芯片可以存储大约34小时的静力触探数据,而一次静力触探实验大约持续5到6个小时,则该芯片完全满足实验需求。数据存储采取分组存储方式。在程序中需要人为添加头指针和尾指针。这些指针数据存储在芯片内部的FLASH空间中。在上位机读取数据时,可以选择读取指定编号组的数据。W25Q128外围电路图如图6所示。

图6 W25Q128外围电路图
3.3 探头倾斜管控模块设计
将静力触探探头贯入土中时,需要实时监控探头的倾斜角度,并调整力的方向,以保证探头垂直贯入土,这样才能保证数据的准确性和有效性。因此,我们选用了ADXL345芯片。电容式三轴加速度计ADXL345分辨率较高(13位)、可以测量的加速度范围较广(±16 g),且测量的数据以16位二进制补码格式输出。此外,ADXL345的分辨率为3.9 mg/LSB,能够测量1°以内的角度变化。ADXL345还可以根据采样速率的不同自动调节功耗,能有效的控制能量损耗,延长系统在野外工作的时长[9]。
静态角度测量原理是通过测量三维坐标轴中的重力加速度分量值,经过一定公式的推导,计算得到角度传感器相对于转动初始位置的最终值。当传感器处于标准状态时,如图7所示,三维坐标系中重力加速度分量值的大小分别为Gx=0,Gy=0,Gz=1g。当传感器位置变化到图8所示的运动状态位置时,重力分量将在3个轴上变化,这时可以得到3个轴重力方向的夹角。
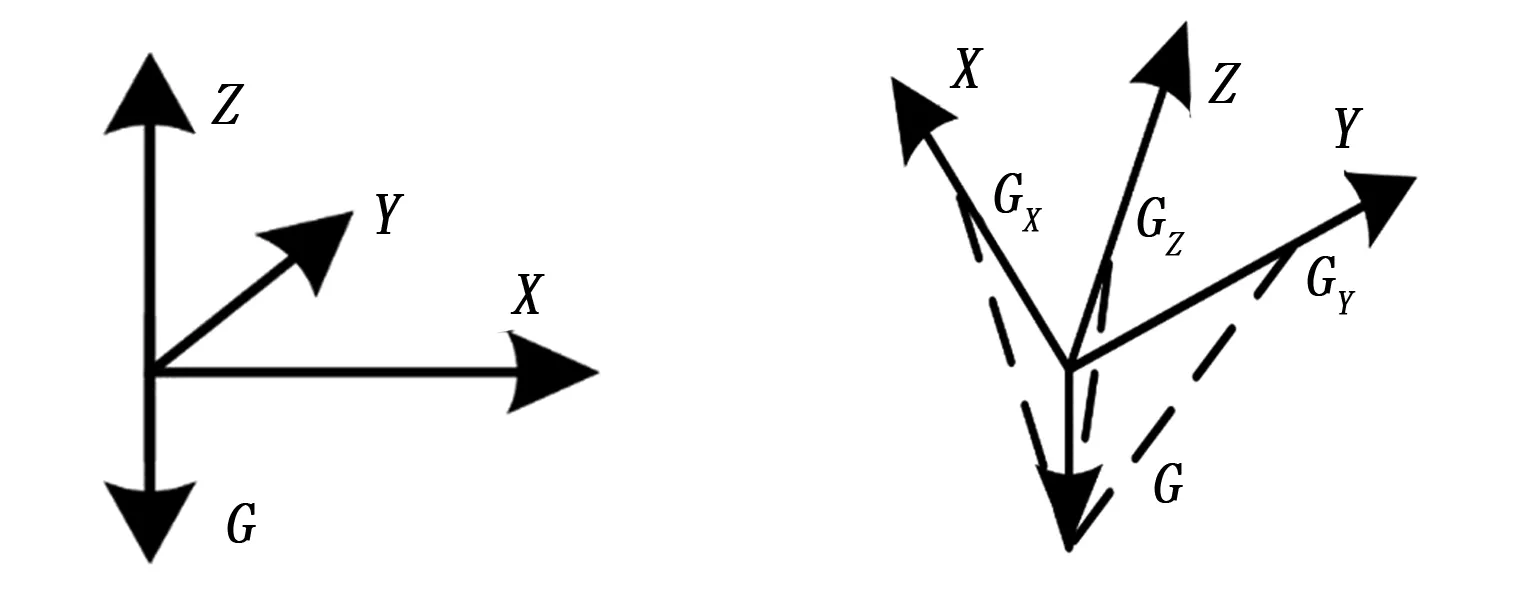
图7 标准状态 图8 运动状态
ADXL345的电路如图9所示。ADXL345芯片可以采用SPI或IIC与单片机通讯。为了节省IO口,我们选用IIC。IIC为2线制,我们将IIC_SDA和IIC_SCL分别与单片机PF0和PF1相连。
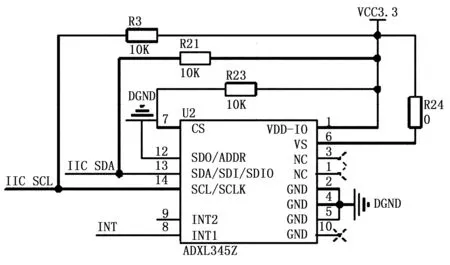
图9 ADXL345Z外围电路图
3.4 基带板通讯模块设计
采用RS485方式与上位机进行通讯。RS485总线传输速率有多种选择,可以灵活的适应不同设备的数据。并且RS485只需要1根使能信号线,2根数据信号线就可以完成信息传输。我们选用75LBC184芯片转换电平,该芯片可以放10 kV静电。75LBC184的外围电路如图10所示。

图10 75LCB184外围电路图
3.5 时间同步模块设计
采集的每组数据在存储时需要添加一个时间戳,我们采用DS3231芯片来提供实时时钟。DS3231时钟1年的误差在2 s以内。DS3231是低成本、高精度的I2C实时时钟,内部集成了温度补偿晶体振荡器,可以减小温度对该器件的影响。同时,DS3231芯片有独立的电池输入端,即使在下位机断电的情况下,仍然可以由电池单独给该芯片供电来保证时间的准确。DS3231芯片的外围电路图如图11所示。
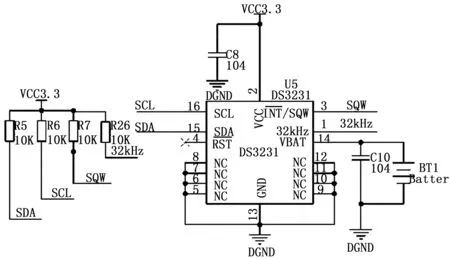
图11 DS3231外围电路图
3.6 数字温控传感模块设计
我们在室内进行探头标定的工作时,环境温度通常在25 ℃左右。但是岩土勘察现场内的温度与室温有所不同,应变片会受到温度的影响,导致其比例系数与实验室得到的标定系数有一定的误差。为了补偿这个误差,我们在最后处理数据时做了温度补偿。静力触探系统选用了DS18B20芯片来采集温度。DS18B20数字温度传感器的精度最大可达12BIT,采集范围为-55~+125 ℃。DS18B20与MCU通讯只需要一根通讯线[11],这也极大的节省了IO口。DS18B20外围电路如图12所示。

图12 DS18B20外围电路图
4 上位机设计和功能研发
静力触探实验数据管理和计算分析系统[12]是基于Qt图形界面框架和Access数据库,采用C++语言开发实现的。上位机主界面如图13所示。该软件可以实现RTC时钟设计、参数设置、数据传输、文件读取等功能。
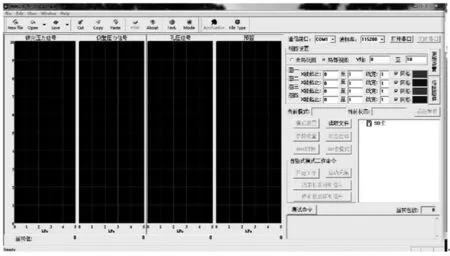
图13 上位机主界面
4.1 RTC时钟
在“脱机模式”工作状态下,点击“RTC时钟”按钮发送当前系统时间给下位机,当下位机设置成功后返回命令,消息面板提示设置成功。如图14所示。

图14 RTC时钟设置
4.2 参数设置
下位机参数可分为设置频率较高的采集参数以及设置频率不高的硬件系数两部分。在“脱机模式”工作状态下“更新设置”按钮有效,点击则弹出对话框选择要设置的参数类型,如图15所示。连续点击弹出对话框的“确定”按钮,则会向下位机发送参数设置数据,设置成功则会在消息面板中提示。

图15 参数设置
图16为硬件系数设置对话框,其中K1、K2、K3、K4分别为不同类型承载力的特征值系数,例如F=K1*(f1-f2)。图17为采集参数设置。
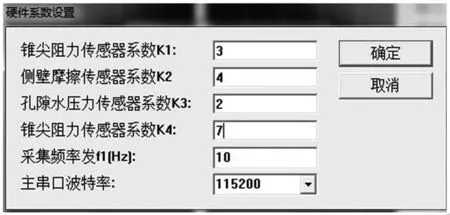
图16 硬件设置选择
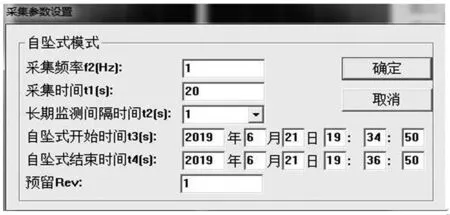
图17 采集参数设置
4.3 数据传输
串口打开之后即可进行数据传输,数据以及命令通用协议为“起始符+长度+命令标识+数据+校验+结束符”。当接收到下位机的数据时,会更新消息面板并按要求绘制相应图形。示例波形如图18所示。
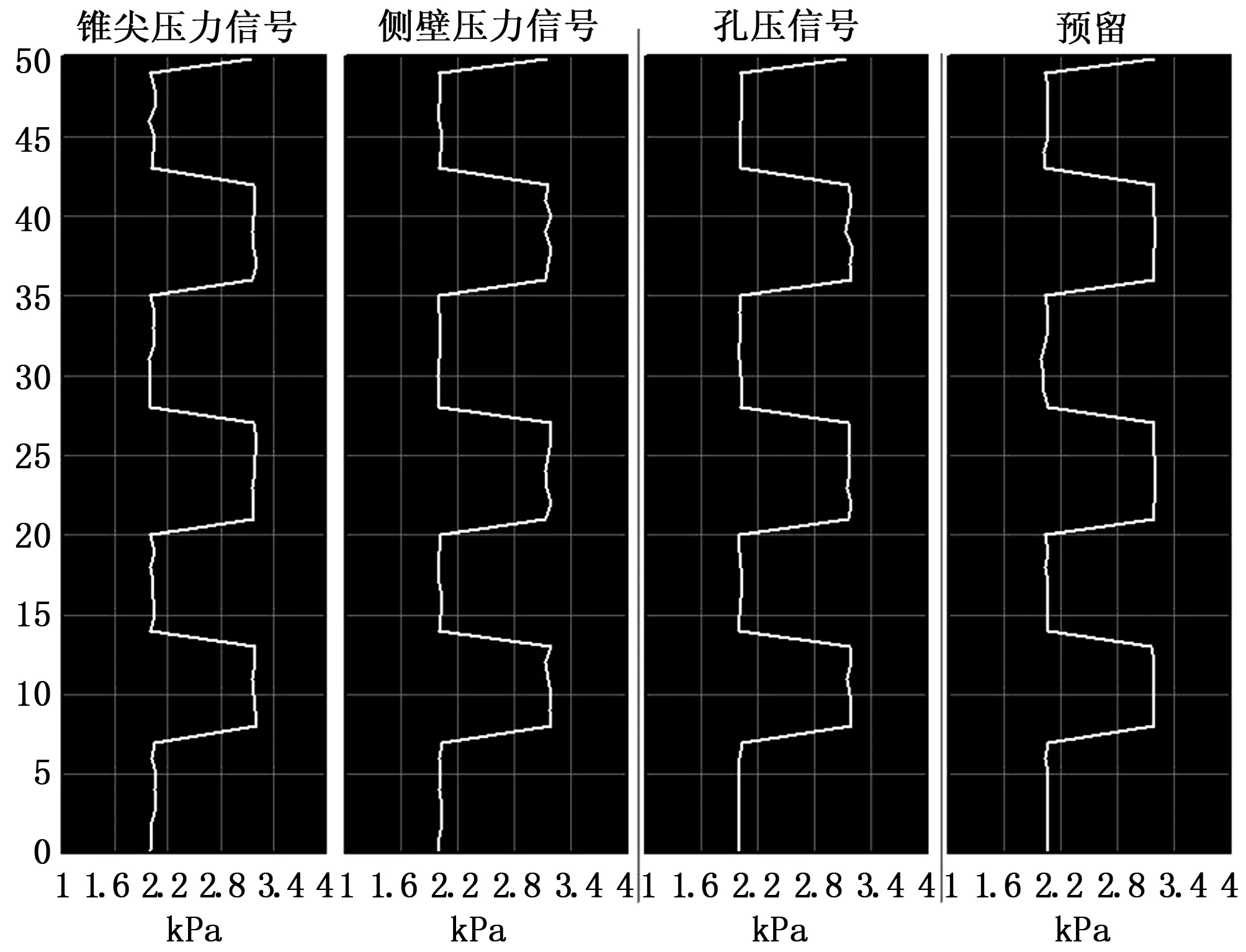
图18 数据传输
5 实验结果与分析
5.1 探头标定
由于探头的归零和重复性误差会影响探头的测量精度,因此在静力触探实验中,静力触探探头每隔一个月都需要进行标定。探头标定过程即通过专业设备,给探头施加连续的压力,同时采集探头的电压值,以此来计算探头采集数据的偏差性。某次使用本系统采集到的数据如表2所示。经计算,该系统非线性误差为0.114%,重复性误差为0.109 3%,迟滞误差为0.049 7%,归零误差为0.030%。以上4项指标均满足行业需求。同时也可以辅以探头的各方面维修,来确保探头测量结果的准确性。可以看出该静力触探系统精度高,采集数据准,有潜力为工程前期分析提供支撑。

表2 探头标定数据
5.2 工程实例分析
广州市南沙区某次静力触探实验数据如图19所示。

图19 锥尖阻力及摩阻比深度变换曲线
本次实验的土层是人工覆盖了1.5米细砂层后的淤泥土层。本次实验共采集每隔10 cm做一次采样,共获得有效数据111个。根据第一章分类图法划分土类后,得到的结果如表3所示。表中的数据表示的是,土层首先经过力学分成后,数据经过归一化处理,各力学分层区段中,该区域对应各类土的隶属度。可以看出比较符合工程实际。

表3 隶属表
6 结束语
从目前初步的使用情况来看,该静力触探系统能够完成传感器数据的采集和存储转发,且该系统高效、准确、土体扰动小、数据连续性好,采集的压力值误差在1%以内。
通过基带板的设计,我们可以看出模块化设计的优势。将数据采集模块,数据存储模块,探头倾斜管控模块,基带板通讯模块,时间同步模块和数字温控传感模块通过MCU相连,保证了传感器数据的采集、存储、传输和通讯的高效。
通过上位机界面的设计,提高了人机交互的可行性。通过RTC时钟界面、参数设置界面和数据传输界面设计,使参数给定更加便捷。
对于高性能、低成本的STM32与各种外围芯片相结合的基带板软硬件配置策略,我们可以看出该配置策略能够较好地实现高性价比的岩体成分分析,并且分析结果较为准确,可以应用在多种模式下,完成对岩体数据的采集、存储和数据传输,为各种工程前期分析提供支撑。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
数学大王·趣味逻辑(2022年3期)2022-03-17
防爆电机(2022年1期)2022-02-16
初中生学习指导·中考版(2020年10期)2020-09-10
中国电子报(2019年55期)2019-10-24
电脑报(2019年8期)2019-09-10
通信产业报(2019年26期)2019-08-30
汽车维修与保养(2019年2期)2019-06-19
科技创新与应用(2019年6期)2019-03-22
中学生数理化·中考版(2017年4期)2017-07-08