交通信号控制发展及相关专利分析
2020-07-30 14:04马勇平
科技视界 2020年19期
马勇平
摘 要
本文对国内外有关交通信号控制的专利申请进行了统计,对交通信号控制发展及相关专利技术进行了分析,总结了交通拥堵问题日益严重的情况下交通信号控制发展的方向及相关智能交通系统的发展。
关键词
交叉口;交通信号控制;智能控制;专利
中图分类号: U491.5+4 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457.2020.19.091
Abstract
This article makes statistics on domestic and foreign patent applications related to traffic signal control, analyzes the development of traffic signal control and related patent technologies, and summarizes the development direction of traffic signal control and the development of related intelligent transportation system in the case of increasing traffic congestion.
Key words
Intersection; Traffic signal control; Intelligent control; Patent
0 引言
随着城市化进程的加快,机动车数量迅速增长,交通拥堵问题日益严重,交通拥堵阻碍经济发展、加重空气污染程度。经济的不断发展势必促使机动车拥有量在一段长时间内仍会持续高速增加,仅仅依靠加强交通基础设施的建设,根本无法解决问题[1]。城市平面交叉口的交通信号控制能够解决交通拥堵的问题,研究城市平面交叉口的交通信号控制对提高道路通行能力、缓解交通拥堵具有重要的现实意义。以下对交通信号控制发展及相关专利技术进行分析。
1 交通信号控制相关专利申请情况
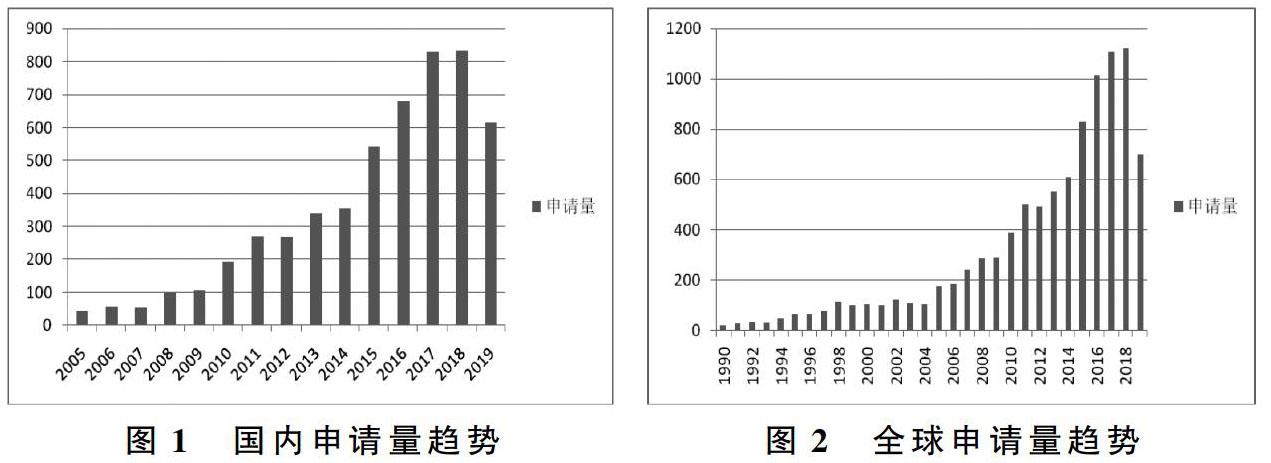
本文的专利数据来自中国专利文摘数据库(CNABS数据库)和德温特世界专利索引数据库(DWPI数据库),国外对交通信号控制技术的研究较早,1927年美国已经申请了有关交通信号控制的专利:US1648629A、US1625990A。国内从1985年开始有相关的专利申请:CN85202417U。通过检索有关交通信号控制的专利申请,得到国内有关交通信号控制的专利申请量趋势如图1所示,全球有关交通信号控制的专利申请量趋势如图2所示。
从图1可以看出,国内2005年有关交通信号控制的专利申请量开始增长,2010年以后呈现一种井喷式发展状态。从全球来看,2005年开始有关交通信号控制的专利申请量开始快速增长。可见随着交通拥堵问题日益严重,交通信号控制方面的研究越来越深入,专利申请量也不断增长。
2 交通信号控制发展及相关专利
交通信号控制的种类有很多种,从发展历程和控制原理角度看,主要经历了空间关系上的发展和控制方法上的发展。城市交叉口形式多种多样,城市所有交叉口组成了平面路网。交通信号控制空间關系上的发展分为:点控制方式、线控制方式和面控制方式。
2.1 空间关系上的发展
2.1.1 点控制方式
只针对单个交叉口的交通信号控制即为点控制方式,其适用于交叉口之间相距较远、相互之间影响不大的情况,控制目标是减少车辆总延误时间及提高交叉口通行能力。
2.1.2 线控制方式
将道路上连续几个交叉口的交通信号机关联起来进行交通信号控制即为线控制方式,其通常用于交叉口之间相距较近的情况。线控制方式的目标是尽量使车辆不停车经过每个交叉口,理想情况是“一路绿波”,即通常所称的“绿波带控制”。
2.1.3 面控制方式
城市所有交叉口和道路形成路网,将线控方式扩大到面上即为面控制方式,其控制对象为路网中的所有交叉口或者路网中某个区域的所有交叉口。
2.2 控制方法上的发展
对于城市交叉口交通信号控制,其控制方法上的发展分为:定时控制、感应控制、自适应控制和智能控制。
2.2.1 定时控制
预先设定信号配时周期、红绿灯时间、相位等,交通信号灯以该预先设定好的信号运行,这种控制方法为定时控制方法。实际的道路运行情况呈现出早高峰和晚高峰的现象,可将一天分为多个时段,不同时段采用不同配时方案的定时控制方法。
国内较早的涉及定时控制的专利申请是1986年由郜永华、王学彦共同申请的城市交叉口交通信号指挥机(公告号CN86207546U),其公开了一种城市交叉口定周期交通指挥机,城市交叉口采用定时控制方法,并且在定时控制的基础上设置交通指挥机还包括显示装置,用于显示各种灯色的剩余时间,使得驾驶员能够获知各种灯色的剩余时间,从而调整驾驶员的交通心理,提高交叉口的不停车通过率。
2.2.2 感应控制
感应控制为根据检测器检测到的交通参数调整红绿灯时长,交通参数如车流量、排队长度等。感应控制分为半感应式信号控制和全感应式信号控制。
(1)半感应式信号控制。
对于有主次干道之分的道路,主干道总保持绿灯直至次干道检测出有车辆到达,红绿灯信号经过适当的转换间隔,立刻将次干道调整为绿灯显示,绿灯时间维持次干道上的车辆全部通过路口或者到达最大绿灯时长,当次干道没有检测到车辆时,主干道保持绿灯,这种交通信号控制方法为半感应式信号控制。
申请人江苏大学2011年提出了发明名称为“一种兼顾行人过街的交叉口次路优先半感应信号控制方法”的专利申请(公开号CN102087792A),公开了在次路进口道上设置次路车辆检测线圈,在主路的人行横道四个终点处各设置行人触摸式感应控制器,在保证次路特殊车辆优先通行的前提下通过设置行人触摸式感应控制器给予主路行人通行权,避免主路行人过街等待时间过长而乱闯红灯的现象。
(2)全感应式信号控制。
交叉口所有入口道都设置检测器,各个信号相位的绿灯时间由检测器检测到交通参数确定,这种交通信号控制方法为全感应式信号控制。
申请人江苏物联网研究发展中心于2015年提出了发明名称为“基于排队长度的具有跳相功能的全感应信号控制方法”(公开号CN104794910A),公开了相位跳转采用跳相方式,相位跳转时,将检测到的车辆等待时间超过最长红灯时间的相位作为下一绿灯相位,如不存在车辆等待时间超过最长红灯时间的相位,则将检测到的最大车辆排队长度的相位作为下一绿灯相位。
2.2.3 自适应控制
自适应控制是把交通系统作为一个不确定的系统,连续测量其状态,如车流量、排队长度、延误时间等,不断了解和掌握对象,根据车流量的动态变化自动调整信号控制参数,与期望的动态特性比较,使控制系统自动地适应交通流,利用差值改变系统的可调参数产生一种控制,使得不管环境怎样变化都能够获得比较理想的控制效果。
由于交通流的随机性,交通信号控制采用单一的控制方法在有些情况下可能达不到理想的控制效果。有研究采用混合控制的方法,将多种交通信号控制方法组合使用。申请人安徽科力信息产业有限责任公司于2011年提出了发明名称为“基于地磁检测的自组织智能信号控制方法”的专利申请(公开号CN102074119A),公开了检测交叉口各个车道进口的车流量,并计算交叉口每个信号相位车道的平均饱和度,根据平均饱和度的大小选择不同的交通信号控制方法,若0.4≤平均饱和度<0.6,采用感应控制方法;若0.6≤平均饱和度<1,采用自适应控制方法;若平均饱和度≥1,采用定时控制方法。
2.2.4 智能控制
由于交通系统具有较强的非线性、模糊性和不确定性,传统的理论和方法很难对其进行有效的控制[2]。有研究将各种先进的智能控制算法应用到交通信号控制中,形成基于智能控制算法的交通信号控制。典型的智能控制有:模糊控制、神经网络控制、遗传算法控制、蚁群算法控制、基于Agent技术和强化学习的单路口交通流控制。
东南大学于2007年申请了模糊控制和定时控制混合使用的控制方法,根据当前交通状态和当前所用信号控制模式之间的不同组合选择模糊控制或定时控制(公开号CN101038700A)。山东大学于2008年申请了一种路口交通流优化控制方法,将采集的交通流量输入到模糊推理的智能模型中,获得下一周期的数值,以车辆平均延误最小为目标函数,采用遗传算法优化,得到最优绿信比,根据此绿信比分配周期实现信号控制(公开号CN101266718A)。中国科学院自动化研究所于2009年申请了基于模糊神经网络的交通信号控制(公开号CN101789178A)。南京航空航天大学于2012年申请了基于计算机视觉的人行横道智能交通灯监管系统及方法,将检测到的行人和车辆数量输入神经网络得到交通信号灯的显示时间(公开号CN103077617A);江苏大学于2013年申请了基于遗传算法的单交叉口信号配时优化方法(公开号CN103150911A)。大连理工大学于2017年申请了一种基于深度强化学习的交通信号自适应控制方法,定义交通信号控制Agent后预训练深度神经网络,然后使用深度强化学习方法对神经网络进行训练,最后采用训练好的深度神经网络进行交通信号控制(公开号CN106910351A)。西安电子科技大学于2019年申请了一种边缘计算交通信号灯控制系统及控制方法,根据采集的车流量进行动态调整学习获得第一交通信号灯配时策略,动态调整学习包括Q学习,根据预设算法对所有路口第一交通信号灯配时策略进行全局优化获得所有路口的最优交通信号灯配时策略,预设算法包括遗传算法、粒子群算法、蚁群算法、模拟退火算法中的任一种(公开号109697866A)。
3 总结与展望
城市平面交叉口的交通信号控制方法已经由单一的控制方法发展为多种控制方法组合使用,对于交通参数的检测,由于通常需要安装检测器检测交通参数,如在道路上预埋地磁线圈检测车流量、在道路上方安装摄像头拍摄车辆图像通过图像处理得到车流量等参数、通过超声波、雷达等设备检测车流量等,而安装地磁检测器会破坏路面,摄像头虽然不需要破坏路面,但受天气状况影响较大,不管采用哪种检测器,都需要一定的成本。有研究仅通过互联网数据得到路口各方向的平均行程速度,计算出用于信号优化的交通运行指数和运行状态等级,并进一步得到信号配时方案(公开号CN108765988A)。还有研究通过行人移动终端和车辆终端发送的位置信息得到行人数量和车辆数量(公开号106683447A)。由于采用智能控制方法对交通信号进行控制能够获得较好的控制效果,随着人工智能的发展,交通信号的智能控制研究必将不断深入。且从整个城市交通系统来看,智能交通系统是发展趋势,其不仅仅是对道路交叉口进行控制,而是集道路交叉口信号灯控制和其他交通行为控制于一体,利用各种不同的科技技术,对交通通行过程中产生的任何一个变化进行及时有效地应对。智能交通系统把人、车、路和环境等交通运输系统的各个环节有机整合,从而使车、路的运行功能一体化和智能化。
参考文献
[1]周力,李煒.我国智能交通控制系统的发展及展望[J].自动化与仪器仪表,2009(2):1-2.
[2]刘祥鹏,隋树林.单交叉口交通信号控制方法现状及其展望[J].科技信息,2012(32):124-125.
猜你喜欢
铁道通信信号(2020年8期)2020-01-05
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
发明与创新(2016年34期)2016-08-22
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
中国交通信息化(2014年6期)2014-06-05
电视技术(2014年19期)2014-03-11
河南科技(2014年14期)2014-02-27