
十字路口智能交通灯PLC控制系统设计
2020-07-29 05:59张林强
科学与财富 2020年16期
摘 要:交通灯系统通过对路况信息的采集和处理对路口的人和车进行控制,从而使交通系统越发的稳定,但是现在大多数的交通灯控制系统都不是很有效率,不够人性化。甚至出现十字路口车辆拥挤的一方红灯常亮,车辆稀少的一方绿灯大开,这一类的情况使得交通运输系统效率不断下降。本设计利用可编程控制器PLC进行程序设计,利用梯形图程序控制各个路口交通灯的时序,并在V-Meca软件中进行仿真。该设计的主要目的是对十字路口的各种交通状况进行分别考虑,实现自动化控制,并且能够根据实时的交通状况智能化地选择系统对应的控制状态。如分别对东西和南北方向的车辆滞留数加以比较,滞留汽车较多的一方延长绿灯时间;对警车,救护车,消防车等特殊车辆实行紧急通行。本设计通过实验来实现其中的一些功能,对红绿灯进行初步的控制。
关键词:交通灯,智能控制,仿真,PLC
交通方面的问题一直是任何一个国家社会和经济发展中的必要问题。我国的现代化都市建设、都市发展、人口增长压力等都将使这个问题越来越突出。交通是否快速便捷是判断一个城市生活水准和发展前景的重要指标之一。目前,我国绝大多数城市正在建设地铁或轻轨来减轻交通上的压力。但是,建设地铁和轻轨都需要很大的人力,物力和时间,这对中小型都市来说不够现实。所以,改善并提高当前交通系统的效率已经是当务之急,其中提高交通灯运行系统的效率更是至关重要[3]。所以,我们需要寻找一种智能的交通灯控制系统,能够依据车辆数目多少变化而自动变化的交通灯。
一.十字路口及车流量模型
在十字路口的各个方向埋入压力传感器,以南方为例,两个压力传感器分别放置在车道的十字路口和距离十字路口L米处。然后在该方向车道通行时间(即绿灯时间加黄灯时间)结束时,打开PLC接受数据通道,每当车辆进入十字路口必先经过检测器1和2,检测器就会发生2个脉冲给PLC,然后记录距离路口L米处车辆通行数m1和路口车辆通行数m2,在下一个通行时间到来之前关闭接受数据通道。这样得到m1-m2的差值n1即为南方直行路口的滞留车辆数量。然后以同样的方式计算出北方直行路口滞留车辆数量n2,比较n1和n2并取两者最大值记为Mn。同理得出东西方向路口滞留车辆最大数量Ms。设Mn-Ms>10,那么南北方向拥堵,东西方向正常,南北直行方向的绿灯时间延长5s,南北左转方向的绿灯时间延长5s,东西方向红灯时长加长5s。设Mn-Ms<-10,那么東西方向拥堵,南北方向正常,东西直行方向的绿灯时间加长5s,东西左转方向的绿灯时间延长5s,南北方向红灯时间延长5s。若-10
二.传感器的选择
传感器是本课题设计检测环节所用的主要元器件之一。压力传感器,光电传感器,红外线传感器理论上都可以进行车辆检测。不同的环境需要选择不同的传感器,光电传感器和红外线传感器都需要放置在路面上,容易受到干扰。考虑到城市复杂的环境人为因素以及自然环境等情况,本课题选择了放置于地面之下的压力传感器,一方面是不易受外界干扰,另一方面是不容易被损坏。对于特殊车辆的检测需要声音检测器。压力传感器是指能感受到压力信号,然后按照一定的规律将压力信号转换为可用的输出的电信号的器件或装置,压力传感器通常由压力敏感元器件和信号处理单元组成。压力感应控制是设计较为重要的一点也是与普通交通信号控制的不同之处。其原理为:压力传感器实时检测十字路口各个方向的车流量,每当有车辆通过时,压力检测器就会产生一个脉冲并发送给PLC,当路口为红灯时,PLC就根据两个压力传感器计数之差得到相应的等待车流量,如图1-2。之后PLC根据设定的智能时长控制原则和各个方向车流量的大小,合理的调整相对应的红绿灯延时时间,从而尽最大可能减少车辆的等候时间。声音传感器内置一个对声音敏感的电容式驻极体话筒,声波使话筒内的驻极体薄膜产生震动,导致电容的变化从而产生与之对应变化的微小电压,这一电压随后被转化为0-5v的电压,再经过A/D转换被数据采集器接受然后传送给计算机,声音传感器用来接收声波,显示声音震动图像。
三.智能交通灯及车辆急行控制方式
交通灯被启动开关所控制,启动开关闭合后,交通信号灯系统开始运行,停止开关断开后所有交通灯熄灭。一般情况下,控制要求如下
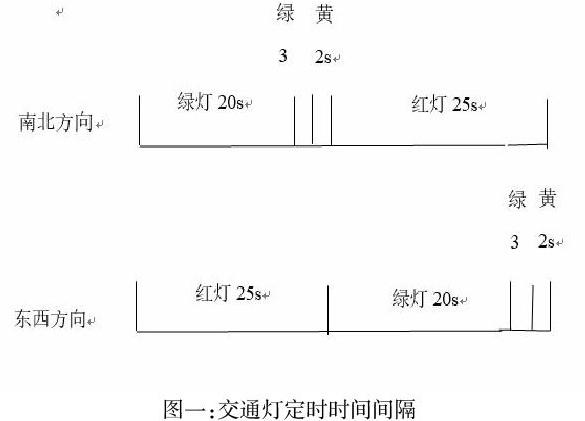
南北方向红灯先亮20s,然后绿灯继续闪烁3s之后黄灯长亮2s,此时南北方向左转红灯亮了75s,接着南北直行红灯亮够20s,同时南北方向左转绿灯长亮20s,闪烁3s之后黄灯亮2s。东西方向与之相对直行绿灯先亮20s,然后绿灯闪烁3s,闪烁之后黄灯亮2s,最后红灯亮25s。此时东西方向左转红灯先亮了25s,接着左转绿灯亮了20s,绿灯闪烁3s,之后黄灯长亮2s,最后东西直行红灯和左转红灯亮50s。理论上设计是没问题的,但是由于V-Meca仿真软件限制,程序中各个方向直行和左转的红绿灯控制时间设为一致。如图1- 1。
当某个方向拥堵时(假设南北方向拥堵),检测传感器就会检测到信号,同时传递给PLC,PLC处理之后南北方向绿灯时间延长5s,东西方向红灯时间延长5s,其余时间不变继续循环。
特殊车辆急行交通灯是否打开,受急行开关SB4和SB5控制,无特殊车辆的时候交通灯按正常时序运行,有车辆急行时将急行开关接通,不管原来交通灯的状态怎样,先关闭原来的交通灯,关闭之后迅速按照急行的控制方式接通交通灯:急行车辆来的方向一律变为绿灯,车辆相对的方向交通灯一律变为红灯。急行车辆经过后,将急行方式控制的交通灯断开,恢复至原来正常的交通灯控制方式。特殊车辆急行信号优先响应某一方向的急行车辆,如果两个方向一先一后出现急行车辆,则先响应先来的一方,然后再响应另一方。如果遇到非常稀少的情况,南北方向同时来车辆,则按先南北后东西的顺序依此响应。
四.硬件设计
在V-Meca中只能画简单的图形,建立三维模型并不容易,但是该软件支持输入.STL格式的外部文件。因此可以在Solidworks中画出自己想要的三维模型并导入该软件中,需要注意的是该软件不支持装配體导入,所以需要把各个零部件依次导入。导入之后选定需要移动的零部件,在要素窗的坐标系中进行x、y、z方向的转换和旋转就可以达到装配的效果。
目录窗中有关于气压、油压、电气、自动化设备和其他的一些三位模型,如果需要添加一些标准配件,可以直接拖拽至3维视窗,然后根据坐标系进行调整和装配。‘帮助示例不仅可以用来学习如何建立一个仿真系统,还可以作为‘库使用,十一个示例几乎包含了该软件所有的功能。如果需要传送带、指示灯、机械臂可以直接在示例里面拷贝。这个功能有利有弊,好处是初学者可以快速上手,不会产生畏难情绪;初学者能够尽可能快的搭建出一个自己需要的系统,尽快达到自己仿真的目的;除此之外的一个优点是,熟练之后可以自己建立适合自己方向的‘库,为自己以后的设计大大的节省时间,从而把时间用在更有创新的地方。
五.软件设计
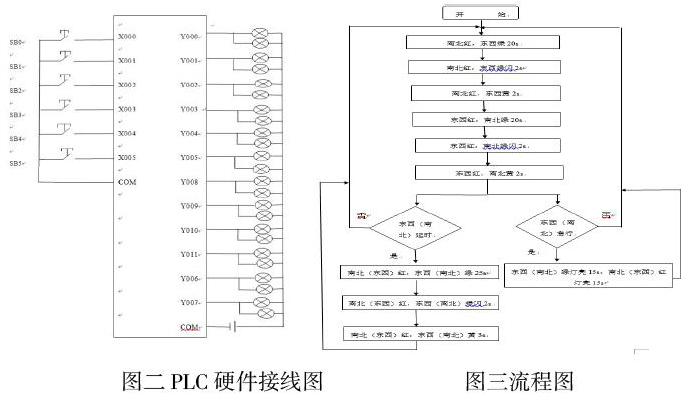
如图二,停止按钮SB1需要控制整个系统的关闭,所以在2维视窗选择一个常闭按钮,在PLC程序中,常闭按钮SB1对应的是常开接点X001,这样PLC通电开关打开之后X001就一直处在得电的状态下。而接下来所有的梯形图都要连接在X001之后,如果停止按钮闭合的话,PLC可以正常运转程序,一旦断开,X001就会瞬间失电,梯形图后面所有的接点也会失电,这样就达到了停止按钮的效果。启动按钮SB0对应的是常开接点X000,X000是连接在接点X001之后,对它再添加一个内部接点,使它产生自锁,它持续得电后根据梯形图依次给以后的接点供电,这样就达到了启动按钮的作用。
南北红灯亮25s,想让红灯亮很简单,让一个内部接点得电并自锁,然后相连到X010。如果要控制时间的话,可以用延时接合定时器来定时。延时接合定时器与一个内部接点相连,同时在红灯的接线上添加一个刚才内部接点的常闭接点。使延时接合定时器与X010同时得电,得电的同时开始计时。延时接合定时器定时到25s时接合,并使内部接点得电后自锁,此时,常闭的内部接点会断开,红灯熄灭,红灯此时亮了25s。黄灯闪烁跟红灯定时类似,让黄灯定时亮1s然后灭1s,再定时亮一秒然后熄灭。所有的红绿黄灯亮灭都是类似,不过他们之间要相互控制,达到各个灯依次亮灭的效果,到此就完成了正常情况下的红绿灯控制。东西或南北延时按钮接通之后,断开正常情况下的的交通灯,启用新的交通灯系统,跟正常情况下的系统除了绿灯时长没有太大区别。实际情况下延时智能时长控制没有这么简单,但是为了简化模拟设计成这样。东西车辆急行按钮接通后同样断开正常情况下的交通灯,转为东西方向绿灯常亮15s,南北方向红灯常亮15s,同理南北方向急行按钮接通后,信号灯与东西方向正好相反。流程图如下图三
六.结 论
本设计将用V-Meca仿真软件设计一个简单的由PLC控制的交通灯系统。首先要熟悉这个仿真软件,但是网上并没有相关教程,在老师带领入门之后,根据软件自带的示例进行自学。慢慢的了解到V-Meca是集PLC,电路图,三维图于一体的仿真软件。在3维视窗设计好三维模型后,不仅能直观的了解它,还能结合2维视窗让它根据自己的想法运动;在2维视窗里添加相应的要素后,运用菜单栏的功能将要素与三维模型建立联系,可以是实现控制三维模型的目的;而在2维视窗最重要的就是PLC,在连接好PLC和各个要素后,通过相应的PLC程序就可以实现仿真的调试功能,从而最终达到自己期望的效果。本设计是控制十字路口的红绿灯,先让它们按照固有的规律进行闪烁,然后设置四个功能按键。一个是东西方向绿灯延时按钮,用于解决东西方向车辆拥堵的问题,另一个自然就是南北方向绿灯延时按钮。还有一个是东西方向特殊车辆急行按钮,用于特殊车辆紧急通过,不需要等红灯。与之相对应的是南北方向特殊车辆急行按钮,用于南北方向车辆紧急通过。在设计过程中,运用延时模块和常开,常闭I/O口完成了上述要求,学到了PLC的优点简洁,可靠。
理论上PLC内部有计数功能和比较功能,可以根据传感器的脉冲计数来比较东西南北方向车流量,从而智能控制绿灯时长。控制方法也可以更加精细,不仅仅比较两个方向滞留车辆数目的大小,还可以对滞留车辆数目进行比较后分档。根据不同的档位设置相对应的绿灯时长。
参考文献:
[1] 杜红艳.基于PLC的智能交通灯控制系统[J].自动化与仪器仪表.2014,2:60-62.
[2] 杜丹,陈德豪,杨靖.篇名[J].基于西门子PLC的交通灯控制系统设计.2018 10:35-38.
[3] 方贵盛,王云凤,陈剑兰.智能交通灯PLC控制实验装置研制[J].实验室研究与探索.2012
[4] 李艳乐.基于PLC的智能交通灯控制系统设计[J].自动化应用.2018年,12:16-17.
作者简介:
张林强(1990-),男,河南驻马店,助教,助理工程师,郑州理工职业学院教师,主要研究方向:电气工程和思想政治。
猜你喜欢
电子测试(2018年23期)2018-12-29
文学少年(有声彩绘)(2017年1期)2017-02-14
电子技术与软件工程(2016年20期)2016-12-21
求知导刊(2016年30期)2016-12-03
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
电子制作(2016年21期)2016-05-17
河南科技(2014年11期)2014-02-27
