一种基于范德华力的微小型夹持装置设计
2020-07-27 12:10李林
现代信息科技 2020年5期

摘 要:在航天领域中,在轨捕获对接技术是一个重要的研究领域。传统的捕获方式为刚性捕获,控制方式复杂,在捕获效率、可靠性上都存在一定的不足。因此,近年来对软捕获方式的研究越来越多。为了改善在轨捕获对接效果,以范德华力作为基础设计出了一款微小型夹持装置。实验结果表明夹持装置可以实现对玻璃的黏附和卸载,并且效率较高。该装置是一种软捕获装置,有着较高的捕获效率与可靠性。
关键词:范德华力;夹持装置;在轨捕获对接技术
中图分类号:TG315;TP241 文献标识码:A 文章编号:2096-4706(2020)05-0139-03
A Micro Clamping Device Based on Van Der Waals Force
LI Lin1,2
(1.Hefei CSG Smart Robot Technology Co.,Ltd.,Hefei 230088,China;
2.CSG Smart Science & Technology Co.,Ltd.,Shanghai 201601,China)
Abstract:In the field of aerospace,on orbit capture docking technology is an important research area. The traditional capture method is rigid,and the control method is complex. There are some shortcomings in the efficiency and reliability of capture. Therefore,in recent years,there are more and more researches on soft capture methods. In order to improve the docking effect of on orbit capture,a micro clamping device is designed based on van der Waals force. The experimental results show that the clamping device can achieve the adhesion and unloading of glass,and the efficiency is high. The device is a kind of soft capture mode,with high capture efficiency and reliability.
Keywords:van der Waals force;clamping device;on orbit capture docking technology
0 引 言
在軌捕获对接技术是航天领域的研究热点方向之一,美国NASA、欧洲EASA和日本JAXA等机构针对在轨对接技术开展了大量的研究和在轨演示实验[1]。目前,在轨捕获机构是针对合作目标,主要是机械臂机构,为刚性捕获方式[2-4]。在捕获过程中需要目标处于理想的动力学状态,依赖复杂的控制方式,同时目标要有配合机械臂抓取的特征点,因此传统的刚性捕获方式面临很大的挑战。基于范德华力的夹持装置属于软捕获方式,对目标物体的形状和状态没有特殊要求,不需要依靠复杂的控制算法,捕获效率高,可靠性强,适用于对不同任务和目标的捕获需求,具有广阔的应用前景[5]。
本文针对基于范德华力的夹持装置的空间应用需求,在研究壁虎黏附脱附机理的基础上,设计了一种具有通用能力的刚柔耦合黏附脱附单元,从而实现对目标物体的夹持。
1 夹持原理
1.1 黏附模型
壁虎在黏附过程中,对角的脚掌内收拉向身体质心形成“Y形锁合”,从而保证强黏附性,如图1所示,定义对角的两条腿上的力分别为F1和F2,夹角分别为α1和α2。根据受力平衡有:
在这里,F1和F2的最大值取决于黏附阵列在角度为α1和α2时可以提供的最大黏附力,F1,max=,F2,max= ,γ是剥离能。联立式(1)和式(2),我们可以得到F的最大值:
当F1或者F2达到临界值,黏附失效,因此F的最大值应当取Fmax,1和Fmax,2的最小值,有:
1.2 脱附模型
壁虎在脱附过程中,脚趾向内卷曲形成“L形剥离”,从而保证易脱附性。Kendall模型考虑在剥落过程中的能量变化,认为新表面的出现所产生的表面能项等于由于应力带来的势能项和黏附材料在应力方向伸展带来的弹性项的和,有:
二次项 为剥离强度,F是剥离力,b是黏附材料宽度,d是黏附材料的厚度,E是黏附材料的弹性模量,γ是剥离能。
Kendall模型考虑的黏附材料在拉伸过程中的能量变化情况。而在实际剥离过程中,黏附材料存在弯曲。黏附材料受弯矩作用的剥离模型,有:
其中M是弯矩,R是弯曲半径。
弯矩M为与剥离力和力臂L有关,力臂L为剥落力F的作用点到脱附临界点的距离。设不同的角β1、β2、β3、β4,如图2所示,有:
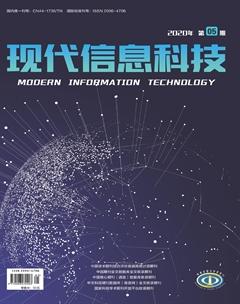
2 机械结构设计
夹持装置呈对称分布。由三个电机、三组牵引绳、两个黏附片和两个伸缩杆组成,如图3所示。夹持装置的质量为1 126.5 g,尺寸为250 mm×180 mm×58 mm,供电电压5 V。
伸缩杆代替上述伸缩机构的功能,由套筒和弹簧组成,末端为刚性基底。弹簧在初始时刻由1号牵引绳拉伸处于压缩状态,通过电机控制牵引绳的拉伸和释放,从而实现伸缩杆的上移和下压。当伸缩杆下压时,末端的刚性基底为黏附片提供预压力,形成具有较大刚度的黏附单元。
定义1号牵引绳为预压绳。施加在黏附阵列上的预压力可以通过控制弹簧刚度和位移来控制力的大小。2号牵引绳一端固定在黏附片一侧,穿过刚性基底上的小孔从而实现限位功能,另一端固定在2号电机上。通过电机控制牵引绳,记录牵引绳由完全松弛至完全拉紧时的电机转动圈数,在电机持续正转相同圈数后,可实现黏附片的卷入;电机持续反转相同圈数后,可以实现黏附片的卷出。定义2号牵引绳为内收绳。3号牵引绳一端固定在黏附片一侧,即与内收绳在同一侧,另一端穿过轨道底端的小孔,并从轨道上端的另一个小孔穿出,从而实现限位功能,固定在3号电机上。通过电机控制牵引绳,记录牵引绳由完全松弛至完全拉紧时的电机转动时间,电机正转持续相同时间,可实现黏附片拉伸力的加载;电机反转持续相同时间,即可完成黏附片拉伸力的释放。定义3号牵引绳为剥离绳。
3 实验验证
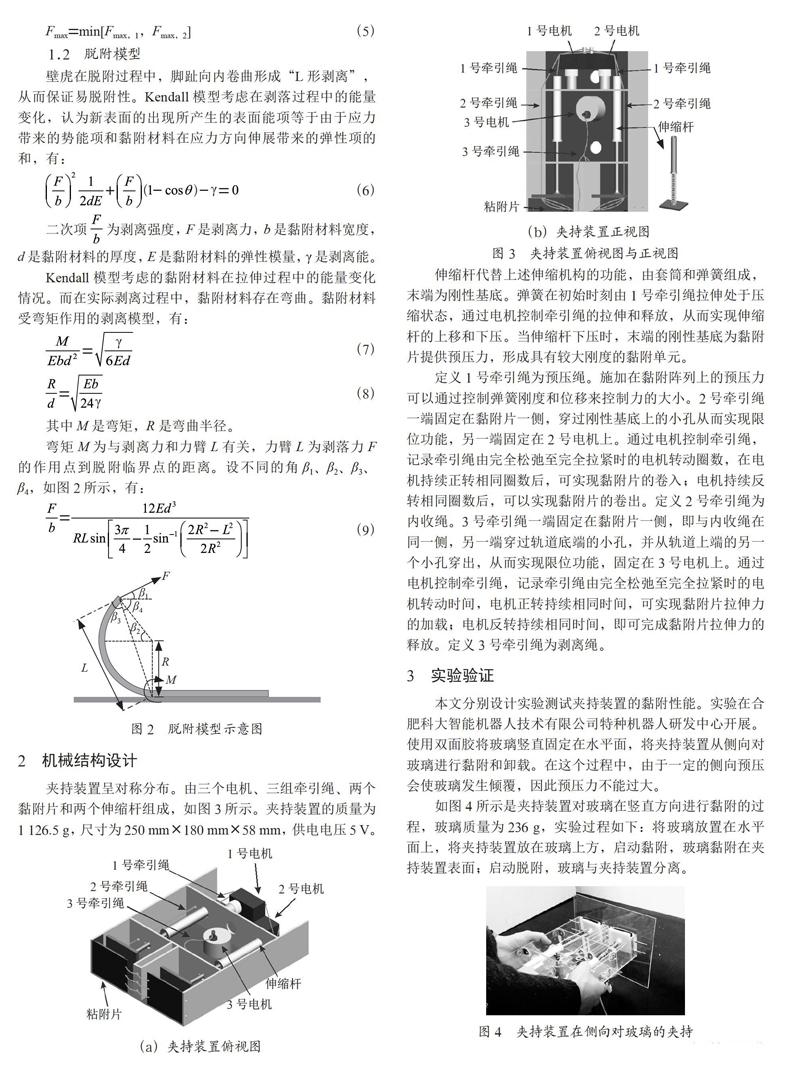
本文分别设计实验测试夹持装置的黏附性能。实验在合肥科大智能机器人技术有限公司特种机器人研发中心开展。使用双面胶将玻璃竖直固定在水平面,将夹持装置从侧向对玻璃进行黏附和卸载。在这个过程中,由于一定的侧向预压会使玻璃发生倾覆,因此预压力不能过大。
如图4所示是夹持装置对玻璃在竖直方向进行黏附的过程,玻璃质量为236 g,实验过程如下:将玻璃放置在水平面上,将夹持装置放在玻璃上方,启动黏附,玻璃黏附在夹持装置表面;启动脱附,玻璃与夹持装置分离。
4 结 论
根据壁虎的黏附脱附机理,建立了黏附脱附模型,分析了不同物理参数对黏附脱附的影响,为微小型夹持装置的设计提供了理论基础。在此基础上,设计了一种刚柔耦合的黏附脱附单元,研发了一种黏附脱附可控的微小型夹持装置。对黏附材料进行了性能评价,为仿生黏附材料在夹持器上的应用提供了理论和实验依据。此外,测试了微小型夹持装置对不同状态目标物体的夹持能力,对推动仿生黏附材料在智能仿生夾持装置上的应用具有重要意义。
参考文献:
[1] MOHAMMED I K,CHARALAMBIDES M N,KINLOCH A J. Modeling the effect of rate and geometry on peeling and tack of pressure-sensitive adhesives [J]. Journal of Non-Newtonian Fluid Mechanics,2016,233:85-94.
[2] MOOSAVIAN S A A,PAPADOPOULOS E. Free-flying robots in space:An overview of dynamics modeling,planning and control [J]. Robotica,2007,25(5):537-547.
[3] BUALAT M,BARLOW J,FONG T,et al. Astrobee:Developing a Free-flying Robot for the International Space Station [C]// Aiaa Space Conference & Exposition. 2015:4643.
[4] AIKENHEAD,BRUCE A. Canadarm and the space shuttle [J]. Journal of Vacuum Science & Technology A:Vacuum,Surfaces,and Films,1983,1(2):126-132.
[5] 梁斌,杜晓东,李成,等.空间机器人非合作航天器在轨服务研究进展 [J].机器人,2012,34(2):242-256.
作者简介:李林(1985.03-),男,汉族,安徽淮北人,工程师,硕士,研究方向:人工智能。