基于机器视觉的地铁站台门与列车门间异物检测方法研究
2020-07-27 16:43张鹤庆张金鑫
现代城市轨道交通 2020年7期
张鹤庆 张金鑫

摘 要:基于机器视觉的地铁站台门与列车门间异物检测方法对保障地铁安全运营,甚至对列车自动驾驶都具有较强的指导意义。为此,文章就此类方法所涉及的检测设备安装和核心检测流程进行综述。首先对用于拍摄站台门与列车门间灯带的摄像机的安装位置及成像角度进行归纳总结;然后根据检测异物时参照对象的不同将现有方法进行分类分析;最后对基于机器视觉的地铁站台门与列车门间异物检测方法进行展望。
关键词:地铁;站台门;列车门;机器视觉;成像;异物检测方法
近年来,随着社会的不断加速发展,城市规模、人口数量也随之扩大,提升城市交通的质量势在必行;而地铁在城市各类交通工具中具有准时、快捷、方便的独特优势,因此,其建设顺势而为。在地铁安全运营中,保障乘客安全候车、安全乘车成为地铁工作者与研究者重点关注的方向之一。地铁站台门是保障乘客安全候车的一种重要设备,但在列车出站时,乘客或者物体可能会被夹住。因此,为保障乘客的人身和财产安全,在列车出站前对地铁站台门与列车门间是否存在异物进行检测十分重要。
1 概述
当前,国内外地铁站台的设计一般分为地下站台、地上站台和高架站台。此外,根据调研发现,地铁站台一般为直线形,但受地形、地质、水文等条件影响,部分城市的地铁站台被设计成曲线形,如上海、重庆的部分地铁车站。由于地铁站台的位置、布局设计不同,因此对检测地铁站台门与列车门间是否存在异物的方法也不同。目前,除了人工检测(即通过在列车头瞭望列车尾处灯带的完整性,判断站台门与列车门间是否存在异物)外,还有自动检测异物的方法,其大致可分为物理检测和机器视觉检测2种类型。
1.1 物理检测
根据物理原理的异物检测方法有激光探测式、红外光幕式和激光扫描式等。其中,激光探测式检测方法为:在站台列车尾端门外的地面上安装激光发射装置,在站台列车头端门外的地面上安装激光接收装置,待地铁站台门关闭后,检测是否有直线形的激光被阻断,进而判断站台门与列车门间有无异物,其安装示意图如图1所示。红外光幕式检测方法类似激光探测式,即通过红外光发射器发射红外光线,由红外光接收器接收红外光线并将接收的信号反馈至主机,从而实现检测站台门与列车门间有无异物的功能。激光扫描式异物检测方法不同于上述2种检测方法,该方法一般应用于曲线站台,即在单个或多个站台门顶部的上方安装激光发射器和接收器,由发射器发出一束光线(一般为单层或多层的扇形面),通过站台门底部防踏空胶条处的灯带反射回接收器,通过测算反射时间判断站台门与列车门间是否存在异物,其检测装置安装示意图如图2所示。
1.2 机器视觉检测
基于机器视觉的地铁站台门与列车门间异物检测可以大致描述为:首先利用摄像机采集列车头/尾处端门外垂直灯带或者站台门底部防踏空胶条处灯带的图像,获取包含完整灯带的原始图像数据,然后利用各类机器视觉的方法检测其原始图像内灯带的完整性,最终自动判断地铁站台门与列车门间有无异物存在。
2 检测成像角度
针对直线形和曲线形2种类型的地铁站台,在利用機器视觉进行地铁站台门与列车门间异物检测时,对摄像机的安装位置和角度提出不同的要求。由于摄像机拍摄地铁站台门底部防踏空胶条处的灯带或者列车头/尾部站台门内侧(靠近列车)垂直灯带的过程中,其拍摄角度对采集的图像质量、异物检测准确性均具有较大影响,因此本文介绍以下3种摄像机的安装位置。
2.1 水平式
此类安装是在列车头位置的站台门与列车门之间垂直安装2台摄像机,拍摄列车尾位置的灯带,安装方便。其摄像机安装示意图如图3所示。
2.2 垂直式
此类安装是在每扇站台门顶部中间位置安装1台摄像机(靠近列车门一侧),拍摄站台门底部防踏空胶条处的灯带,适用于曲线型站台。其摄像机安装示意图如图4所示。
2.3 对角式
此类安装是在列车头的顶部和列车尾的下部且靠近站台门侧各安装1台摄像机,分别拍摄车头处与车尾处的灯带,检测区域内无盲区。其摄像机安装示意图如图 5所示。
3 检测方法
基于机器视觉的地铁站台门与列车门间异物检测示例如图6所示。根据最终判断检测结果内是否存在异物时参照对象的不同,将现有基于机器视觉的地铁站台门与列车门间异物检测方法大致归为2大类:①基于原始数据的检测方法;②基于特定模板的检测方法。
3.1 基于原始数据的异物检测方法
此类异物检测方法的主要依据为:根据输入原始图像的数据,对其进行各类降噪、细化、均值化、混合高斯模型建模等操作,最后依据原始数据图像的检测结果,即依据灯带的完整性、连续性,判断地铁站台门与列车门间是否存在异物。下面介绍几种典型的此类检测方法。
3.1.1 基于 Hough 变换的异物检测方法
该检测方法的具体过程为:①获取包含灯带区域的原始数据图像;②对其进行降噪、灰度处理等操作,得到预处理图像;③对预处理图像进行二值化处理,并采用Hough变换进行直线检测;④依据原始检测信息判断站台门与列车门之间是否存在异物。
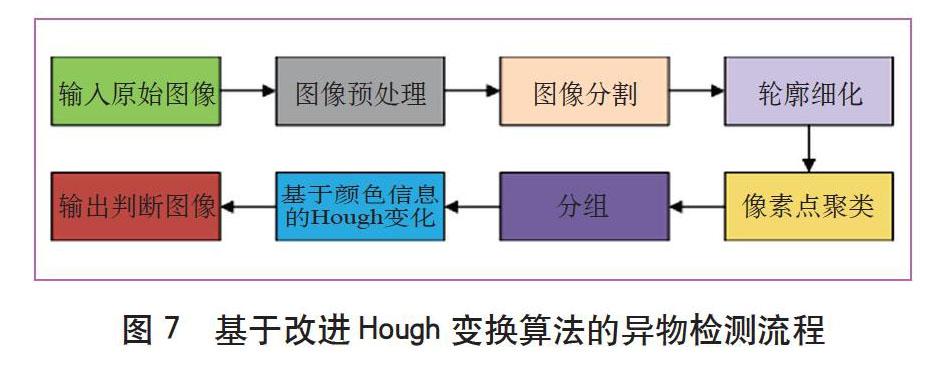
3.1.2 基于改进 Hough 变换算法的异物检测方法
该检测方法的具体过程为:①对获取的原始图像进行类似上述方法的预处理;②对预处理图像的目标区域进行分割并细化处理;③根据原始图像的颜色直方图信息,对细化后图像内的相邻像素点进行聚类分析;④利用感知分类对聚类后的图像再次分组;⑤根据基于颜色信息的Hough变换对每一组进行直线(灯带)拟合检测;⑥依据原始检测信息判断地铁站台门与列车门间是否存在异物。其检测流程如图7所示。
3.1.3 基于差分图像的异物检测方法
该检测方法的具体过程为:①利用混合高斯模型对地铁站台门与列车门之间无异物状态下的图像进行建模,得到该区域的重构背景图像;②获取地铁站台门关闭后相邻几帧待检测图像,并对其进行叠加后求平均,得到均值化图像;③将均值化图像进行灰度化处理并与背景图像做差,得到包含目标区域的差分图像;④对差分图像进行阈值化处理,得到二值化图像;⑤对其图像进行相关形态学操作;⑥根据检测信息判断地铁站台门与列车门间有无异物。其检测流程如图8所示。
3.2 基于特定模板的异物检测方法
与基于原始数据异物检测方法的主要区别在于,该检测方法依据检测结果中灯带的边长(长与宽)与原始完整灯带的边长(长与宽)之间的差值确定目标区域内是否存在异物。下面介绍几种典型的此类检测方法。
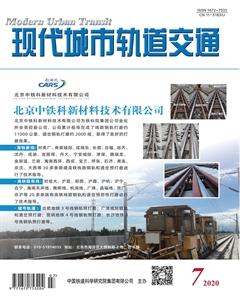
3.2.1 普通特定模板异物检测方法
当前,在基于特定模板的异物检测方法中有一种较为普通、基本的异物检测方法,该方法可分为2个阶段。第1阶段:采集站台无列车情况下的灯带图像,利用均值建模技术重构出均匀、完整灯带的模板图像。第 2阶段:①采集地铁站台门关闭且列车未出站时目标(灯带)区域的原始图像;②对其原始图像进行降噪等简单的预处理操作;③提取预处理图像内最大连通区域(灯带)最小外接矩形的边长等特征;④将其特征和模板图像与其对应的特征进行对比,实现判断地铁站台门与列车门之间是否存在异物的功能。其检测流程如图 9 所示。
3.2.2 基于不同优化策略的异物检测方法
该检测方法与普通特定模板异物检测方法的不同之处在于第2阶段。下面介绍几种典型的此类检测方法。
(1)利用形态学优化的方法。将地铁站台门关闭后采集到的相邻几帧图像相加,并求其平均值实现降噪,得到包含灯带且稳定、均匀的图像;对其进行二值化操作及形态学操作,得到检测结果图像; 根据对比检测结果中灯带与模板灯带之间长度的差异,判断其间是否有异物存在。
(2)利用Hough变换优化的方法。对视频中每一帧图像进行全局分析;检测并利用Hough变换提取灯带;对其图像进行降噪、增强图像对比度等操作;测量提取的直线(灯带)的长度;将其与模板图像内完整灯带的长度进行对比,进而通过阈值判断实现异物检测功能。
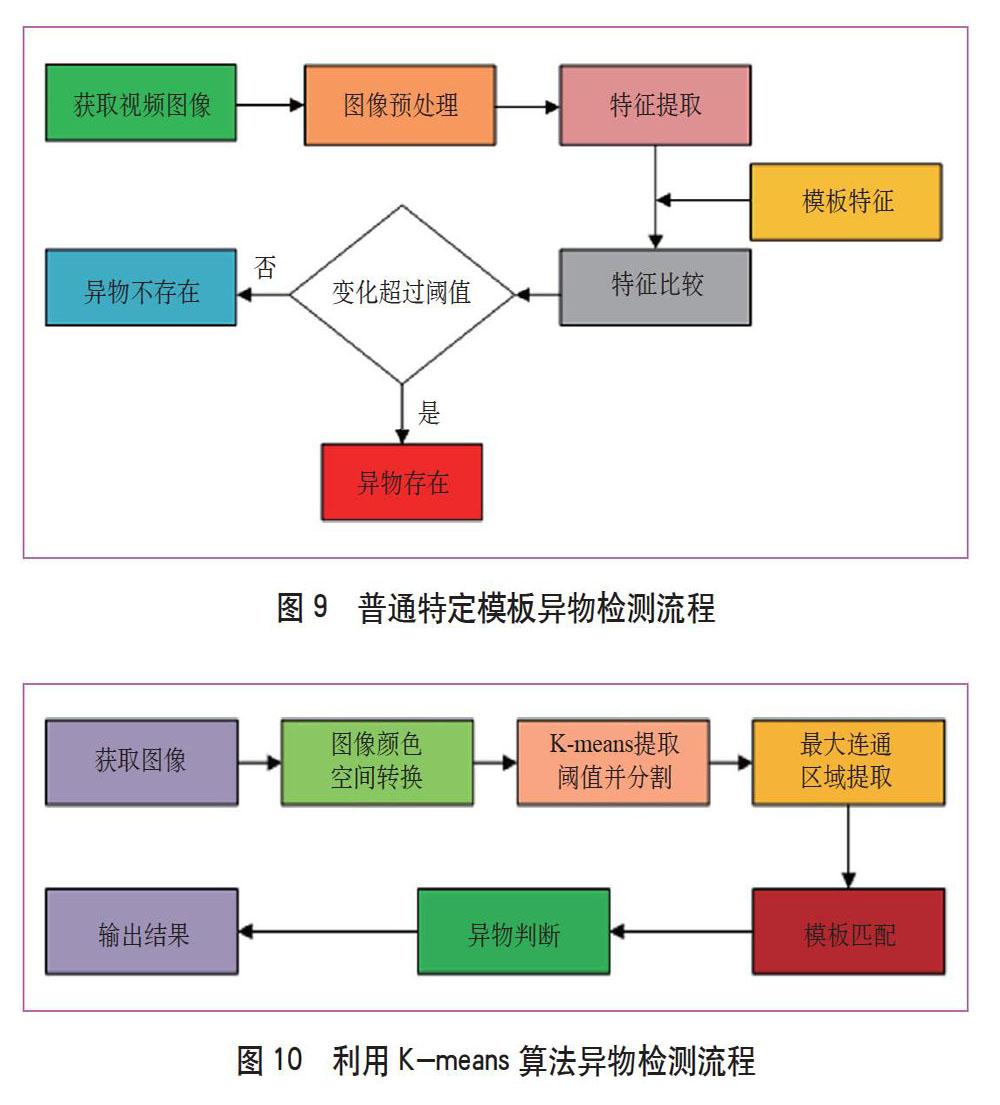
(3)利用K-means算法优化的方法。将采集到的原始图像从RGB(红Red,绿Green,蓝Blue)颜色空间转换为HSV(色调Hue,饱和度Saturation,明度Value)颜色空间并进行比例融合,得到单通道图像;采用K-means聚类方法计算二值化的阈值,得到带有灯带信息的二值化图像;采用形态学相关操作去除部分噪声,得出该图像内的最大连通区域;计算最大连通区域的长和宽,并与模板图像内完整灯带的长和宽进行对比,判断站台门与列车门间是否存在异物。其检测流程如图10所示。
通过对上述基于机器视觉地铁站台门与列车门间异物检测方法的总结分析可以得出,现有的异物检测方法具有不涉及复杂检测流程和算法设计的优势,便于对其进行复现,对于初次接触该领域的其他研究者有较大辅助作用;而其中基于特定模板的异物检测方法需要提前制定、采集、计算包含完整灯带的特定模板的相关特征信息。
4 结束语
目前国内外大部分城市的地铁运营,仍然依靠人工目视瞭望灯带的完整性判断地铁站台门与列车门间是否存在异物,此种方式对地铁安全运营带来一定的安全隐患。虽然自动检测地铁站台门与列车门间异物的方法已取得一定效果,其中物理检测方法简单易操作,不涉及复杂算法,但对设备的安装工艺要求较高,同时在检测过程中存在明显的盲区现象;而基于机器视觉进行异物检测的方法具有智能化高、准确性高等优势,可为地铁列车的自动驾驶提供重要的技术支撑,但对于此类方法在地铁车站的适用性仍需进一步研究。
参考文献
[1]朱颖,任磊,苏智慧. 郑州市郊铁路运营方案研究[J].城市轨道交通研究,2019,22(4):39-41,47.
[2]赵宗建. 地铁列车与站台空隙的安全风险分析及防控措施[J].现代城市轨道交通,2016(4):71-74.
[3]刘伟铭,陈纲梅,李海玉,等. 地铁风险空间分析及异物检测系统技术要求[J].铁道标准设计,2019, 63(10): 168-176.
[4]黎卓虹. 屏蔽门防夹人激光探测装置安装方案探讨[J].中国高新技术企业,2009(19): 46-47.
[5]解锐恒. 屏蔽门与车门间隙检测系统的研究与设计[J].科技创新与应用,2016(7):59.
[6]葛学仁. 地铁站台安全防护系统设计简析[J].现代城市轨道交通,2010(4):65-66.
[7]王瑞峰,杨子河,孔维珍. 红外光幕在地铁屏蔽门障碍物探测中的研究[J].传感器与微系统,2013,32(3):25-28.
[8]韩灵山,李孝普,孙康萌,等. 地铁列车与站台门间隙红外探测安全防护系统设计[J].机电技术, 2019(5):36-38,60.
[9]朱韵琳,徐晓. 基于激光扫描系统的机车车顶异物检测[J].激光杂志,2016,37(5):60-63.
[10] 黄华文,刘伟铭,李军,等. 地铁屏蔽门与车门间异物自动检测技术[J].铁路计算机应用,2015(12):62-65.
[11] 吴卫海,刘伟铭,李海玉,等. 一种新的地铁曲线站台异物检测系统研究[J].城市公共交通,2015(9): 33-36.
[12] 李雪,胡振超. 基于视频检测的屏蔽门安全监测系统[J].中国新通信,2018,20(8):141.
[13] 饶美婉. 新型地铁站台门与车门之间顶置式防夹人自动探测系统的设计[J].城市轨道交通研究,2017,20(5): 143-146.
[14] 谭飞刚,汪洋,刘开元. 一种无盲区的地铁站台异物自动检测设想[J].深圳信息职业技术学院学报, 2017,15(3):25-28.
[15] 雷焕宇. 基于机器视觉的户外站台列车和屏蔽门之间异物检测系统研究[D]. 广东广州:华南理工大学, 2018.
[16] 郑兆鹏,张祥福. 基于改进Hough算法的地铁屏蔽门与列车间异物自动检测技术[J].内蒙古科技与经济, 2015(14): 78-80,82.
[17] 王晓阳. 城市轨道交通站台门系统绝缘方案研究与探讨[J].现代城市轨道交通,2019(2):14-18.
[18] 萬鑫. 浅谈地铁屏蔽门与车门异物的自动检测技术[J].华东科技:学术版,2016(4):36.
收稿日期 2019-11-28
责任编辑 党选丽
猜你喜欢
科学与财富(2022年1期)2022-05-31
中国铁路文艺(2022年2期)2022-03-07
科学与生活(2021年13期)2021-09-10
小雪花·成长指南(2021年6期)2021-08-18
电脑报(2021年17期)2021-07-07
第二课堂(课外活动版)(2019年10期)2019-11-23
文萃报·周二版(2018年22期)2018-09-18
高中生·青春励志(2017年2期)2017-06-09
幸福·婚姻版(2016年9期)2016-09-27
青少年日记(2009年12期)2010-01-20