
容错型汽轮机电超速遮断系统的设计与实施
2020-07-27 08:47张莹,付星,魏静
山东电力高等专科学校学报 2020年3期
张 莹,付 星,魏 静
(1.新疆华能轮台热电分公司,新疆 库尔勒 841600;2.国家电投集团平潭能源有限公司,福建 福州 350440;3.山东电力工程咨询院有限公司,山东 济南 250013)
0 引言
汽轮机超速遮断系统是汽轮机危急遮断系统(Emergency Trip System,简称ETS)的一个重要组成部分,起着汽轮机安全监控和保护的重要作用。当系统检测到机组超速信号时,通过逻辑判断后自动驱动停机电磁阀,实现紧急停机,以避免汽轮机超速事故发生。传统超速遮断系统中,一般设置两套电子式超速(简称电超速)保护装置及一套机械超速保护装置。电超速保护装置中每个转速检测模块仅能处理一路转速测量信号,停机电磁阀组仅设计一套,整个系统容错性不高。当ETS故障或转速检测模块、停机电磁阀组故障时,将会发生超速保护拒动,严重时将会造成汽轮机飞车的重大事故。本文对汽轮机超速遮断系统进行完善,将超速遮断系统的部件设计为冗余结构,提高系统的容错性,降低任一环节故障引起系统误动和拒动的风险。
1 常规设计方案
1.1 电超速遮断装置
根据 《防止电力生产事故的二十五项重点要求》,汽轮发电机组轴承应安装两套转速监测装置,并分别装设在不同的转子上。常规超速遮断系统中,一般设置有两套电超速保护装置,每套电超速保护装置均设置3个测速探头[1]。其中一套电超速保护装置的3个测速探头布置在汽轮机前轴承座,转速信号采集至汽轮机数字电液控制系统(Digital Electro-Hydraulic Control System,简称DEH),经DEH的3块转速采集卡,三取中后做高限判断。高限设定值为3 300 r/min,送出三路冗余超速信号至ETS,最终通过ETS输出超速跳机指令,遮断停机电磁阀,将汽轮机进汽阀油动机的动力油迅速泄去,使进汽阀快速关闭,实现停机。另一套电超速保护装置的3个测速探头布置在汽轮机前轴承座,转速信号输入至汽轮机监测仪表 (Turbine Supervisory Instrumentation,简称TSI)系统,经3块TSI的转速卡进行高限判断,对结果进行三取二处理后,输出3路冗余指令至ETS,ETS遮断停机电磁阀,实现跳机。
上述两套电超速遮断装置,均是通过ETS实现保护动作,而且最终遮断动作的是同一套停机电磁阀。当ETS或停机电磁阀发生故障时,这两套电超速保护装置都将失效,无法有效遮断停机电磁阀实现自动停机。
1.2 机械超速遮断装置
常规超速遮断系统,除了上述两套电超速遮断装置之外,还包括一套机械超速遮断装置。机械超速遮断装置是汽轮机的另一套安全保障系统,是电超速遮断装置的后备停机手段,机械超速遮断装置和电超速遮断装置两者整定在相同的超速遮断值上。
机组正常运行时,机械超速遮断装置的飞锤由弹簧和弹簧定位圈固定住。当汽轮机转速超过额定转速的10%时,增加的离心力就会克服弹簧的压力,使飞锤向外击出,推动遮断滑阀向盖板方向移动,将进汽阀动力油总管中的隔膜阀薄膜上的控制油排出,控制油压降低,打开隔膜阀,从而将进汽阀的动力油总管中的油泄去,关闭所有进汽阀,实现机组停机。这种方式不通过停机电磁阀泄去隔膜阀的控制油压,不受ETS的影响而直接使汽轮机停机。
相对于电超速遮断装置,机械超速遮断装置的动作值会有一定的误差。另外,由于环节复杂且不具冗余性,机械超速保护装置会发生误动和拒动,可靠性较低。
2 容错型超速保护设计方案
为了提高超速遮断动作的可靠性,防止因超速飞车造成安全事故,有必要取消可靠性较低的机械超速遮断装置[2],设计具有高度容错特性的汽轮机电超速遮断系统。系统中每个环节均设计三重冗余或二重冗余结构,即设计3套冗余的电超速保护装置、两套冗余的汽轮机停机电磁阀组以及软件逻辑保护与硬回路保护相结合的超速停机驱动回路[3],确保系统中任一部件故障时,系统都不会发生误动和拒动。
2.1 设计冗余的电超速保护装置
汽轮机共设计3套冗余的电超速保护装置。每套超速保护装置由3个相同而独立的转速检测模块组成,而且每个转速检测模块均设计3个输入通道,能同时接收3路转速测量信号。每个转速检测模块对输入的3路信号进行中值选择后,再作为该模块的最终有效输入。本设计方法的信号检测环节有很强的容错功能,任何一个输入通道或测速探头故障时,系统仍能可靠动作。
2.2 设计冗余的汽轮机停机电磁阀组
为避免前文多套超速遮断装置共用的一套停机电磁阀发生故障,导致整个机组的超速遮断系统无法正常动作,本方案设计完全相同的两套停机电磁阀组。两套电磁阀组独立并行工作,任何一套故障,另一套仍能保证汽轮机超速时停机。每套停机电磁阀组均包括4个自动停机电磁阀,并分为奇数和偶数两个通道,奇数通道包括电磁阀1和电磁阀3,电磁阀1与电磁阀3并联;偶数通道包括电磁阀2和电磁阀4,电磁阀2与电磁阀4并联,奇数通道与偶数通道串联。若两个通道中各有一个电磁阀无故障可正常打开时,汽轮机进汽阀的动力油总管中的油压就能泄掉,关闭所有进汽阀,使汽轮机超速时停机。这样设计可有效防止任何一个电磁阀故障时系统发生误动和拒动,保证系统可靠工作。
2.3 软件逻辑保护与硬回路保护相结合
为了避免ETS发生故障,控制系统无法正常工作,本方案设计了ETS软件逻辑保护与硬回路保护相结合的停机驱动方式。除了采用三取二软件逻辑通过ETS控制停机电磁阀组的方案外,还同时设计由电超速保护装置输出继电器搭接的三取二逻辑保护硬回路。每个转速模块发出的动作信号通过继电器回路,进行硬件的三取二逻辑处理。每套超速保护装置都设计有3个输出继电器,这3个继电器分别由转速模块输出动作,作为三取二表决通道。3个继电器输出接点先两两串联,再把上述3个串联组合并联起来,作为整个超速遮断装置的最终输出遮断信号。当ETS故障时,硬回路继电器输出信号用以直接切断停机电磁阀组的供电回路,将汽轮机进汽阀的动力油总管中的油压泄掉,关闭所有进汽阀,实现快速可靠停机。这种设计兼顾了遮断动作的安全性和可靠性。
3 实施方式
具有高度容错特性的汽轮机电超速遮断系统的结构示意图如图1所示。
1)在汽轮机3个不同轴承座处分别设置一组测速探头,每组3个测速探头的测量信号分别输入至3套电超速保护装置。在汽轮机高压缸前轴承箱轴瓦处设置3个测速探头,其测量信号输入至电超速保护装置A中;在汽轮机低压缸后轴承箱(位于低压缸B后的轴瓦处)设置3个测速探头,其测量信号输入至电超速保护装置B中;在汽轮机中压缸后轴承箱(位于盘车齿轮处)设置3个测速探头,其测量信号输入至电超速保护装置C中。
为进一步提高系统的容错性能,每套电超速保护装置也采用3套冗余的容错型结构。每套电超速遮断装置包括3个相同的转速检测模块,而且每个转速检测模块均同时接收3路测速信号,并对这3路测速值进行比较,去除最大值和最小值,取中值后作为该模块的最终有效输入。当某通道的测量值与其他两通道的数值有明显偏差时,系统将判定该通道传感器故障,任何一个故障都发出报警信号。
2)设置两套独立工作、独立供电的停机电磁阀组。停机电磁阀组A接收ETS三取二超速逻辑判断后的遮断动作控制信号,并同时接收两套电超速保护装置A和B中的继电器三取二逻辑判断后的动作信号。电超速保护装置A和B独立于ETS工作,即使ETS故障,电超速保护装置A和B仍能可靠动作,实现安全停机。同时,停机电磁阀组B接收电超速保护装置C的继电器三取二逻辑判断后的动作信号,保证停机电磁阀组A故障时,若机组转速超过安全设定值,系统可通过控制停机电磁阀组B实现停机,防止机组超速飞车造成设备损坏和安全事故。
3)为提高系统工作电源的可靠性,整个系统的3套超速保护装置和ETS均采用各自独立的双电源冗余供电,每个装置的电源与其他装置的电源都互不影响,这样设计保障了整个机组超速遮断系统供电的可靠性。
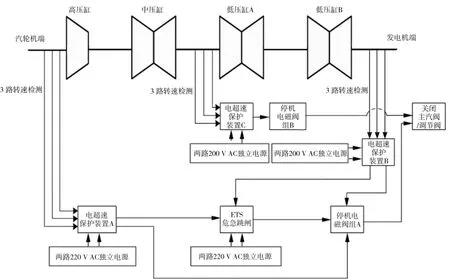
图1 具有高度容错特性的汽轮机电超速遮断系统的结构示意图
4 结语
常规汽轮机超速保护系统,电超速保护装置仅设置两套,均通过控制系统软逻辑实现。本文针对常规汽轮机超速遮断系统动作可靠性不高的现状,提出了一种具有高度容错特性的汽轮机电超速遮断系统的设计方法,将超速遮断系统的每个环节均设计为三重冗余或二重冗余结构,设计了3套冗余电超速保护装置,以及两套冗余的汽轮机停机电磁阀组以及软件逻辑保护与硬回路逻辑保护相结合的超速停机驱动回路。该方案增强了系统的容错性,解决了传统汽轮机超速遮断系统中,任一环节故障时系统容易发生误动和拒动,遮断动作可靠性低的难题。该设计方法,对于取消了机械超速保护装置,超速保护冗余度不够的汽轮机具有良好的应用前景。
猜你喜欢
电气技术(2022年8期)2022-08-20
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
现代仪器与医疗(2021年4期)2021-11-05
能源工程(2021年2期)2021-07-21
有色设备(2021年4期)2021-03-16
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
汽车电器(2018年1期)2018-06-05
汽车维护与修理(2016年3期)2016-02-28
少先队活动(2014年6期)2015-03-18
