
基于伪卫星与微惯导组合的室内定位终端设计
2020-07-25 02:57:32陈振杰蔚保国祝瑞辉贾浩男康习勇
无线电工程 2020年8期
杜 凯,陈振杰,蔚保国,祝瑞辉,贾浩男,康习勇
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.战略支援保障部队航天系统部驻石家庄地区军代室,河北 石家庄 050081)
0 引言
人们大多数时间生活在室内。特别是在大型商场购物、地下停车场寻车和体育场进出口查找等场合,人们对室内场合位置服务需求迫切。王杨[1]和席瑞[2]等人对室内主流定位技术和原理进行了总结。石高涛[3]等人研究了基于WiFi智能手机室内定位方法。基于射频识别的室内定位技术被广范地研究[4-6],常用于制作电子围栏系统。超快带是一种高精度室内定位技术[7]。文献[8-9]改进了基于到达信号强度和信号指纹的定位方法,为室内定位提供了思路,然而WiFi室内定位精度较低,不能满足用于高精度的需求,射频作用距离和范围有限,虽然超快带能够提高较高的定位精度,但需要专门的接收设备,无法用常规商用接收机芯片融合。北斗伪卫星是一种能够发射北斗B1/GPS L1导航信号的地面无线基站设备,是室内定位常用的一种技术手段。
基于北斗伪卫星的定位终端可以借助现有的商用芯片,只需要修改定位芯片的软件,无需更改硬件,能实现室外GNSS和室内北斗卫星信号的同时接收和解析,且基于北斗伪卫星的室内定位技术能够实现高精度室内定位[10]。然而,目前的室内定位终端采用智能手机[11]和基于GNSS接收机,都是室外定位终端[12-14],直接使用都无法接收室内伪卫星信号。考虑到北斗伪卫星具有与空间导航信号相同的缺点,即无法在遮挡区域实现正常定位,因此,在室内走廊、角落等区域,单独使用北斗卫星无法满足连续定位。本文将伪卫星定位和微惯导定位无缝融合,利用微惯导在遮挡区域进行连续定位,解决了空间导航信号不连续的问题。
1 终端总体设计
终端包括天线、北斗伪卫星定位模块、惯性传感器定位模块、智能手机和软件APP模块。其中,北斗伪卫星定位模块用于接收、解析北斗伪卫星导航信号,并将解析出的数据经蓝牙上传到智能手机端。惯性传感器安装在行人脚部,用于采集行人运动状态参数,并经蓝牙上传到手机端。智能手机通过蓝牙接收北斗伪卫星模块和惯性传感器模块信号,送入到软件APP模块实现组合定位和位置的界面地图显示,如图1所示。
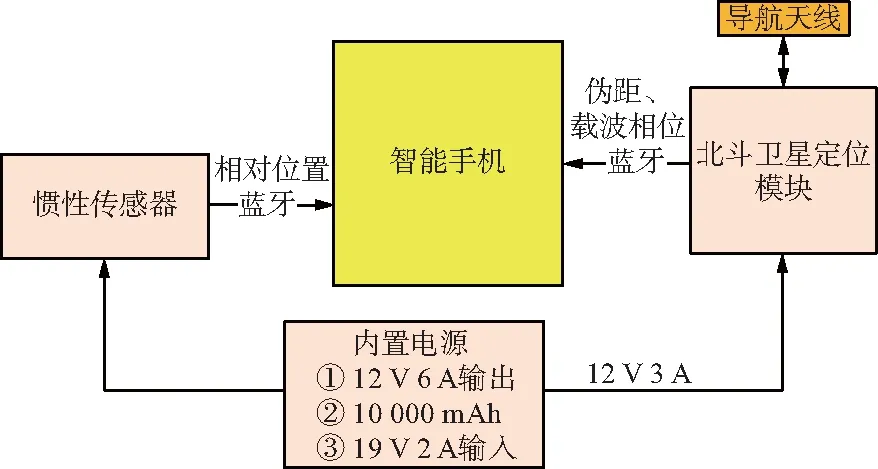
图1 室内定位终端组成Fig.1 Composition of indoor positioning terminal
1.1 小型化四臂螺旋天线
考虑到便携性,本终端采用了小型化、高精度的四臂螺旋天线,如图2所示。该天线具备以下优点:支持3系统7频点B1/B2/B3/L1/L2/G1/G2,高精度高质量高动态信号接收,八臂四馈零相位技术,高精度,结构轻小,仅为19 g,支持GNSS差分高精度定位。天线接口为SMA-K形式。

图2 小型化四臂螺旋天线Fig.2 Miniaturized four-arm helical antenna
1.2 北斗伪卫星定位模块
室内定位模块基于卫星导航定位芯片设计,集成了LNA,SAW和TCXO、蓝牙和电源设计等器件,可以接收BD B1,GPS L1,GLONASS L1 和Galileo E1等4个频点的卫星信号实现精确定位,具有极低功耗与小体积特点。其卫星导航定位芯片内置伪卫星IP软核,能够接收和解析北斗伪卫星导航信号。整个室内定位模块的组成如图3所示。
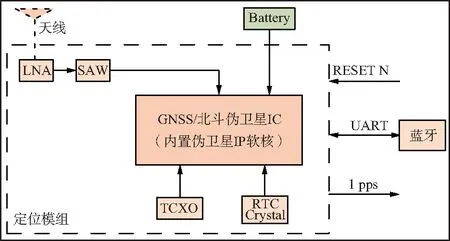
图3 伪卫星定位模块组成Fig.3 Pseudolite positioning module
北斗伪卫星IP软核是一段程序代码,使卫星导航芯片能够捕获跟踪北斗伪卫星导航信号,并输出导航信号的原始观测量信息(伪距、载波相位和多普勒等)。内置北斗卫星IP软核的卫星导航芯片能够同时接收解析空间导航卫星和室内北斗伪卫星信号。
1.3 微惯性传感器定位模块
微惯导定位功能模块组成,如图4所示。主要由传感器、处理器、电源和嵌入式算法软件等组成,其中定位方式包括较高精度的微惯性器件,通信方式包括蓝牙和RS232/422。
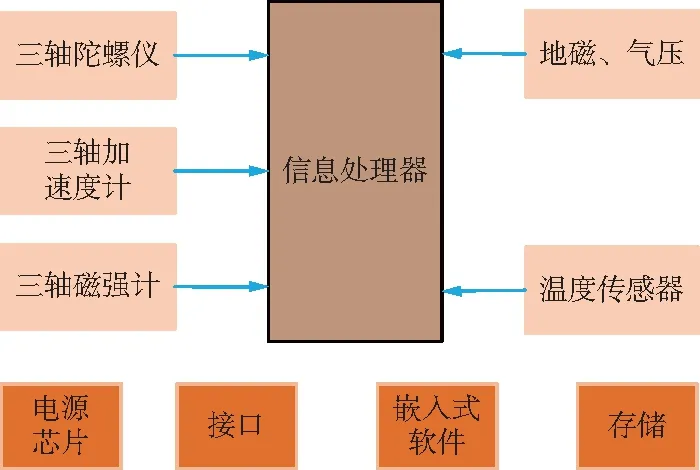
图4 微惯导定位功能模块组成Fig.4 Composition of micro inertial navigation module
微惯性传感器安装在脚部,主要采用运动约束微惯导定位算法。双足交替前进过程中,双脚交替前进,一脚静止,另一脚迈动,单步过程静止时间约占38.5%,静止运动特征可被足部穿戴微惯性传感器识别,用以辅助微惯性导航。分析显示,纯惯导定位误差随时间呈指数增长,有静止特征约束微惯导定位误差呈线性增长,理论上可以提供定位精度。
行人运动特征示意如图5所示。微惯导室内定位误差发散如图6所示。
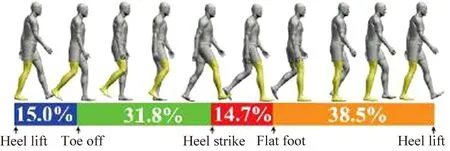
图5 行人运动特征示意Fig.5 Schematic diagram of pedestrian movement characteristics
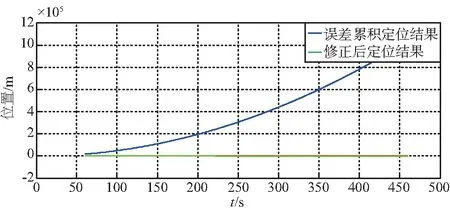
图6 微惯导室内定位误差发散Fig.6 Divergence of indoor position error for micro inertial navigation
1.4 电源设计
电源模块负责将锂电池提供的3.3~4.2 V的电压转换为室内定位模块所需的3.3,3.0,1.8,1.2 V,如图7所示。
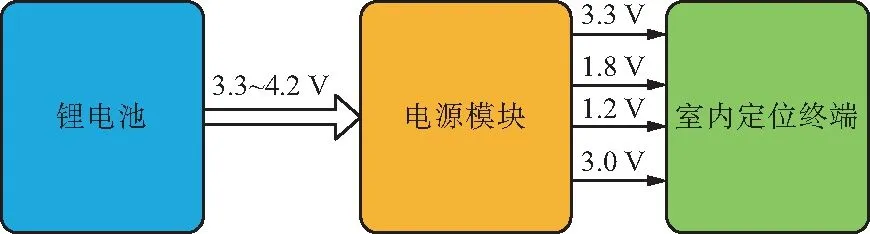
图7 电源转换示意Fig.7 Schematic diagram of power conversion
锂电池具备充放电功能,其中充电管理单元主要负责对锂电池进行充放电管理。通过外接适配器给锂电池充电,充电过程中通过指示灯颜色标识出充电或充满状态,同时可以对锂电池剩余电量给出信号指示。当剩余电量不足时给出警告提示并关机保护。
1.5 外壳结构设计
手持定位终端的结构壳体设计借鉴手机电池背夹的结构形式,需要考虑的设计要素:方便携带、容易与手机结构结合并固定。考虑到各型号手机的生命周期短的特点,需要进一步考虑手持定位终端的结构壳体可以兼容多型手机的结构形式,可与不同尺寸的手机贴合使用,如图8所示。
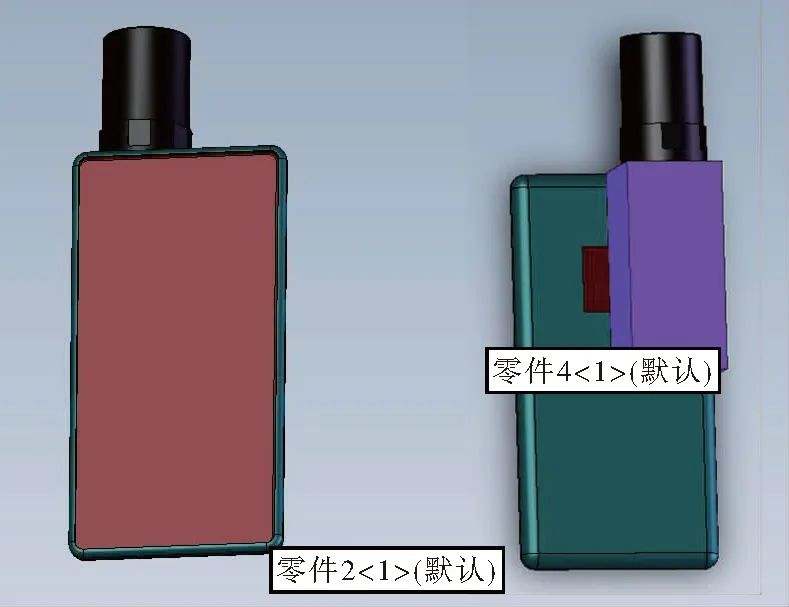
图8 外壳结构Fig.8 Shell structure
1.6 通信
通信模块采用无线和有线2种方式,其中无线采用低功耗蓝牙模块,适用于北斗伪卫星定位模块、惯性传感器模块与智能手机连接。保留了北斗伪卫星模块与智能手机的有线连接方式,即通过OTG数据线分别连接智能手机与北斗伪卫星定位模块的Type-C接口。
2 终端软件设计
终端软件由观测量采集软件、定位解算软件和应用软件组成。观测量采集软件实现北斗伪卫星定位模块和惯性传感器定位模块的接入和观测量数据获取;定位解算软件包括北斗伪卫星定位解算和惯性传感器定位解算;应用软件实现了伪卫星和惯性传感器的智能混合定位,并叠加高精度室内地图。终端软件组成如图9所示。
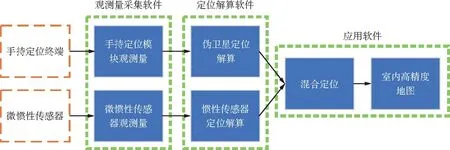
图9 终端软件组成Fig.9 Terminal software composition
2.1 观测量采集软件
观测量采集软件利用低功耗蓝牙(BLE)与手持定位模块和微惯性传感器进行数据传输,BLE的连接建立在通用层性配置文件(Generic Attribute Profile,GATT)协议之上。GATT 是一个在蓝牙连接之上的发送和接收很短的数据段的通用规范。GATT给设备定义了若干角色,其中主要的2个是外围设备和中心设备,外设通过广播自己来让中心设备发现自己,并建立GATT连接,从而进行更多的数据交换,一个外设只能连接一个中心设备,而一个中心设备可以连接多个外设。将智能手机作为中心设备,手持定位模块和微惯性传感器作为2个外围设备进行观测量传输。GATT连接拓扑如图10所示。
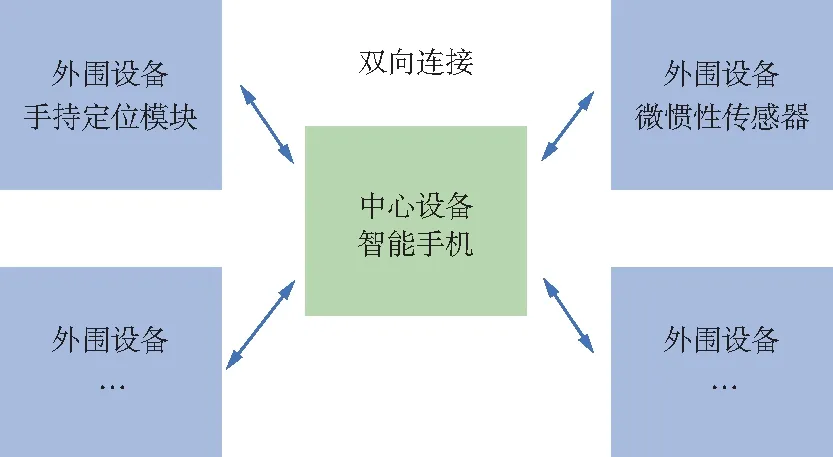
图10 GATT连接拓扑Fig.10 GATT connection topology
2.2 定位解算软件
定位解算软件包括伪卫星定位解算和微惯导定位解算2部分。伪卫星定位解算采用载波相位差算法,实现亚米级定位。微惯导定位解算是在已知位置点上,利用相对位移进行位置推导。由于微惯导传感会在固定方向上产生角度偏差,随着位移增大,导致其定位误差越大,因此需对惯导定位结果进行纠偏,纠偏算法如下:

2.3 应用软件
应用软件接收伪卫星和微惯导2类定位结果,并对定位结果进行融合择优,输出最终混合定位结果,叠加高精度地图,将组合定位终端的定位结果进行可视化展示。
应用软件定位混合流程可描述如下:① 接收伪卫星定位结果,同时记录第一个定位结果作为微惯导初始点;② 位移后记录伪卫星定位结果作为微惯导纠偏点,并计算出微惯导角偏差;③ 当伪卫星因信号遮挡等原因无法解算出定位时,利用角偏差计算微惯导定位结果并输出;④ 当伪卫星信号重新捕获后,输出伪卫星定位结果,并记录伪卫星的高精度定位结果作为微惯导纠偏点。终端软件界面如图11所示。
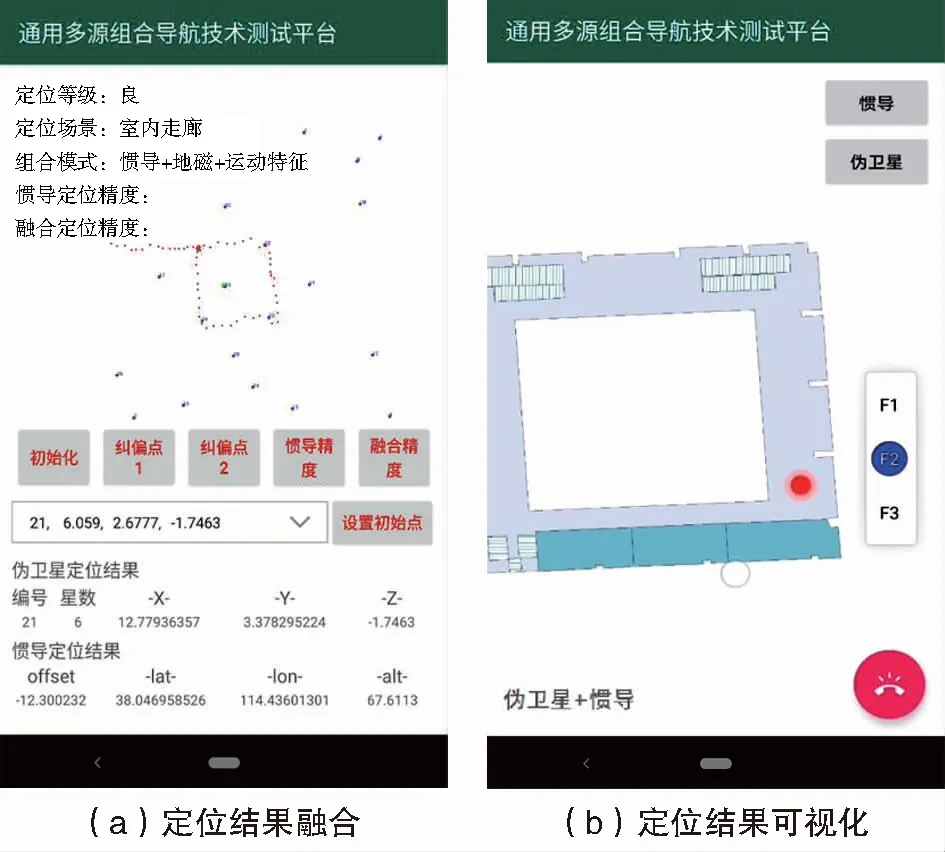
图11 终端软件界面Fig.11 Terminal software interface
3 试验分析
试验采用自主研制的室内定位终端,如图12所示。
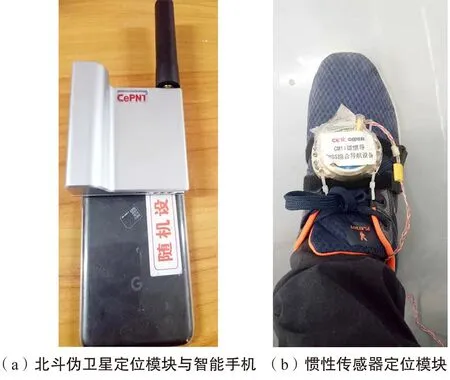
图12 北斗伪卫星与惯性传感器室内定位终端Fig.12 Indoor positioning terminal of pseudolite and inertial sensor
试验时,启动北斗伪卫星与惯性传感器定位终端,运行智能手机端APP软件,点击蓝牙连接,将北斗伪卫星与惯性传感器数据经蓝牙上报的智能手机,开启位置数据记录功能。试验场地选择某单位C7人工智能试验场及其周边室外区域,试验路径包括室外和室内2部分。实验者从室内出发,沿室内规划的矩形轨迹行走2周后沿室内墙壁从C7楼北门出去,然后从C7楼东边道路由北向南行走,从C7南门进入,最终回到起点。当行走至参考点1,2,3,4,5,6时,点击保存10 s定位结果,用于定位精度分析。试验环境和试验定位轨迹如图13所示。定位结果如表1所示。
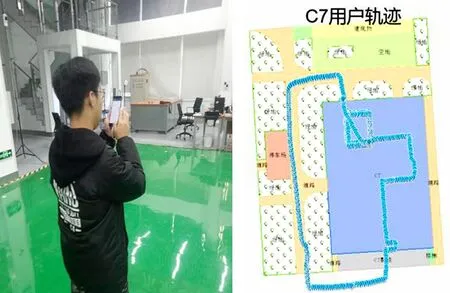
图13 试验环境和试验定位轨迹Fig.13 Test environment and test result trajectory

表1 定位结果Tab.1 Position results
通过数据分析可知,室内组合定位终端平均定位精度优于0.3 m。
4 结束语
本文提出的北斗伪卫星与惯性传感器室内组合定位终端,通过将伪卫星定位IP软核内嵌到卫星导航芯片的方法,实现了北斗伪卫星信号的接收。与惯性传感器结合,解决室内连续无缝的高精度定位。随着人们对室内位置服务需求的增长及北斗伪卫星和惯性触感器组合定位技术的不断改进,该定位终端将会得到更多应用。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
现代装饰(2020年8期)2020-08-24 08:22:58
铁道通信信号(2019年9期)2019-11-25 01:44:58
当代陕西(2019年18期)2019-10-17 01:48:50
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
电子制作(2016年15期)2017-01-15 13:39:14
小学科学(学生版)(2016年1期)2016-10-09 01:53:02
