
基于CSI指纹序列匹配的LTE室内定位方法
2020-07-25 03:01:08韩卓宜王延昭修春娣
无线电工程 2020年8期
韩卓宜,王延昭,修春娣
(北京航空航天大学 电子信息工程学院,北京 100191)
0 引言
据统计,人们80%的日常生活时间在室内度过,因此,室内环境下的位置服务需求日渐旺盛[1]。随着4G移动通信技术及服务蓬勃发展,LTE网络被广泛部署于居民区、大型商场和飞机场等场所。LTE室内定位系统可以利用现有LTE 通信网络设施,降低系统部署开销和成本,因而成为室内定位的研究热点[2-6]。
由于指纹定位算法受室内环境非视距(Non-Line of Sight,NLOS)传播影响相对较小、定位准确度高,目前被广泛使用[7-11]。然而,现有的指纹定位方法普遍采用接收信号强度 (Received Signal Strength,RSS) 作为特征指纹。由于RSS数据是多径信号的叠加,无法反映信号瞬时变化,灵敏度不高,指纹数据之间的区分度不够,导致单点指纹匹配时可能会出现匹配点偏离实际情况过远,从而限制了指纹匹配算法的定位精度[12]。本文研究基于信道状态信息(Channel State Information,CSI)指纹序列匹配的LTE室内定位方法。一方面利用CSI数据作为指纹,提升了指纹数据的灵敏度和稳定性;另一方面通过序列匹配算法降低了定位点出错的概率,提升了LTE指纹定位性能。
1 LTE信道状态信息获取
LTE采用正交频分复用(Orthogonal Frequency Division Multiplexing,OFDM)技术实现物理层的数据传输。随着无线局域网技术的发展,IEEE802.11n及之后的标准采用信道状态信息CSI来量化信道特征,以保证通信质量。CSI是物理层的一个细粒度值,描述了频域内每个OFDM子载波上的幅值和相位。对CSI数据的采集可以一次性获取所有子载波的CSI信息,每个子载波的CSI会沿着不同的衰落或散射路径传播,从而具有不同的幅值和相位。因此,CSI受多径的影响较RSS更小,且表现更为稳定[13]。RSS与CSI特性对比如表1所示。
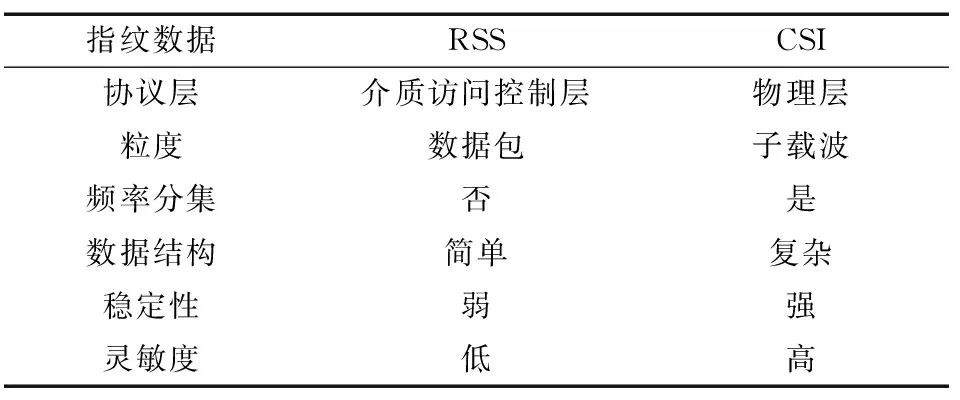
表1 RSS与CSI特性对比Tab.1 Features of RSS and CSI
1.1 CSI模型
在 OFDM 传输系统中,每个信道状态的频域模型可以表示为:
Y=HX+N,
式中,Y,X分别为接收和发送信号向量;H为信道信息矩阵;N为信道中的加性高斯白噪声。
各个子载波的CSI可以表示为:
H=Y/X。
假设OFDM的子载波数量为m,则CSI矩阵H可以表示为:
H=[h0h1…hm-1]T,
则第i个子载波的CSI为:
hi=|hi|ej∠hi,
式中,|hi|,∠hi分别表示第i个子载波的幅值和相位[14]。
对于LTE系统,可以利用小区专用参考信号(Cell-specific Reference Signals,CRSs)进行CSI估计。将接收设备逐次放置在参考点上,估算出相应的下行CSI。在第p个参考点,从第b个发射天线到第r个接收天线的第k个CRS的信道频率响应为:
式中,Lp,b,r为多径分量(Multipath Components,MPC)的数量;ap,b,r,l,τp,b,r,l分别为第l个MPC的增益和传播延迟;ωc为载波频率;Δf为相邻CRSs之间的频率间隔。不同参考点和收发天线的Lp,b,r,ap,b,r,l,τp,b,r,l可能不同,但为了方便描述,下文中省略了参数的下标p,b,r。
然而,实际接收信号中可能存在同步误差、采样时钟漂移、频率偏移、相位噪声和接收噪声等诸多问题[15]。考虑到这些因素的影响,t时刻的hp,b,r,k估计值可以表示为:
nr,k(t)=
nr,k(t),
式中,ωd为载波频率偏移;φ(t)为随时间变化的相位噪声;δ(t)包含了时变同步误差和采样时钟漂移;nr,k(t)为接收到的噪声。
由上文给出的信道估计表达式发现,相位失真会造成信道估计不准,导致建立指纹数据集的CSI与在线定位时的CSI不匹配,造成定位出错。避免相位失真的手段有2种,一是只利用CSI幅值信息作为指纹;二是对CSI相位信息进行补偿。
1.2 CSI获取
近年来,Intel和Atheros对几款市场上常见的商用网卡驱动程序开源。CSI提取难度的降低和支持设备的增加,为其在室内定位等方向的研究和应用提供了基础条件[16-18]。
本文利用配备了2个天线的LTE信号接收原型系统接收来自北京航空航天大学校园周边中国联通公共宏基站的LTE信号。原型系统的射频部分在AD9361的评估板AD-FMCOMMS2上实现。射频芯片AD9361的载波频率70 MHz~6 GHz可调。在Xilinx全可编程SOC芯片Zynq-7020的评价板ZedBoard上实现基带处理。Zynq-7020是一款基于Arm+FPGA平台的开发板,支持Python编程,可以在芯片上实现基带处理算法。为了降低实时处理的复杂度,在每个子帧中只对信道进行一次估计,因为室内用户在一个子帧中(1 ms)的移动可以忽略不计。
2 基于CSI指纹的序列匹配算法
现有的指纹匹配算法,如NN,KNN及贝叶斯分类等,都是依据单个数据点的指纹特征进行匹配定位。然而,用户运动具有连续性,可以为目标位置的估计提供额外的信息,序列匹配算法可以结合运动前后位置的相关性,对定位结果进行修正,提高定位精度[19]。
本文研究基于CSI指纹的序列匹配算法。总体方案如图1所示。离线阶段包括CSI数据获取、CSI原始数据处理、提取特征数据和CSI指纹库构建;在线阶段包括CSI实时数据采集和序列匹配定位。

图1 算法总体方案Fig.1 Algorithm implementation scheme
2.1 指纹序列库构建
首先由指纹点之间的位置关系构建相邻矩阵M,若指纹点之间的空间距离小于1个间隔,则判断2个指纹点具有临近关系。计算任意指纹点之间的距离,完善相邻矩阵M。
假设序列长度为L,通过相邻矩阵M,构建指纹序列库,具体方法如下:设序列起点为y0,根据相邻矩阵M,y0可以和它的相邻点形成一个长度为2的序列u,u=[y0,yi],其中yi为与y0相邻的第i个指纹点。然后以yi为新的起始点,继续扩充序列,直至序列达到指定长度L。重复该方法,得到序列长度L情况下的所有序列,结合对应指纹点的CSI信息,构建指纹序列库UL。
2.2 序列匹配
序列匹配算法如图2所示。在t1时刻,测试数据为x1,算法执行的是传统的单点指纹匹配,通过K-近邻算法得到的定位结果y1,1,作为初始定位结果输出O1。t2时刻,新的输入数据为x2,并与前一时刻的数据x1组成测试序列b2=[x1,x2],进行序列匹配,提取L=2时的序列库U2,通过距离公式计算b2与u之间的距离:
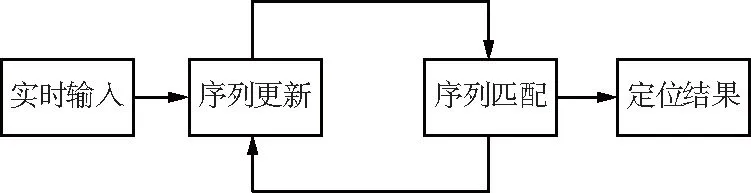
图2 序列匹配算法Fig.2 Sequence matching algorithm
(5)
计算得到欧式距离最小情况下的序列匹配结果ui=[yi,1,yi,2],通过yi,1对前一时刻的定位结果y1,1进行修正,并将yi,2作为t2时刻的定位结果输出O2。
tn时刻输入数据为xn,tn-1时刻的测试序列为bt-1=[x1,x2,…,xn-1],将xn加入序列末尾,此时若序列超过规定长度L则剔除首项,生成新的测试序列。提取序列长度为L时的序列库UL,进行序列匹配,并将序列匹配结果的尾项yi,L作为tn时刻的输出On。
3 实验与分析
3.1 实验环境
在真实环境中进行数据采集,以验证本文所提算法的定位性能。实验环境为北京航空航天大学新主楼F座的室内走廊,选取了一个1 m×0.6 m的区域,并用77个均匀分布的参考点布满实验区域,垂直间距为0.1 m,水平间距为0.1 m。
3.2 定位结果分析
实验采用定位准确率来衡量定位结果,NN算法测试了500组数据;序列长度L=2测试了500组数据;L=3测试了500组数据;L=4测试了300组数据。由于实验中参考点和测试点是相同的,所以KNN算法在k=1情况下的准确率远大于其他取值,所以只列出NN定位结果。此外,算法比较了不同序列长度L的序列匹配定位结果,具体结果如表2所示。

表2 定位结果比较Tab.2 Positioning results of different methods
由实验结果可见,序列匹配算法相对于NN在准确度方面有明显提升。当L=3时,序列匹配已经得到了很好的定位性能;当L<3时,序列匹配算法的序列选择范围增大,点与点之间的约束增加,从而降低了定位误差;当L>3时,算法定位准确度已经趋于稳定,反而因为序列选择过多,增加了计算时间。
4 结束语
通过在LTE室内定位中引入CSI指纹和序列匹配算法,提升了指纹数据的灵敏度和稳定性,降低了定位出错概率,从而提升了LTE的定位性能。由于序列匹配相对还是一个比较新的概念,国内外对于序列匹配的研究还不是很多[20-23]。现有的序列匹配算法都不够完整,序列长度等关键参数的选取都缺乏依据,且定位耗时长。未来的研究工作可以从两方面展开:特征指纹考虑CSI相位信息对定位准确率的影响;从序列库建立的角度入手,降低序列库的规模和算法的定位耗时。
猜你喜欢
环球人物(2022年4期)2022-02-22 22:05:06
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
小哥白尼(趣味科学)(2021年11期)2021-02-28 08:35:00
小天使·一年级语数英综合(2020年10期)2020-12-16 02:57:11
自动化学报(2016年8期)2016-04-16 03:39:00
西部广播电视(2015年10期)2016-01-18 04:01:45
青少年科技博览(中学版)(2015年7期)2015-08-12 18:50:24
爆笑show(2015年4期)2015-06-24 01:55:12
小学阅读指南·高年级版(2014年2期)2014-05-27 05:29:32
电测与仪表(2014年15期)2014-04-04 12:05:32
