
基于深度学习高分辨率遥感影像语义分割①
2020-07-25 01:47尚群锋帅世渊
计算机系统应用 2020年7期
尚群锋,沈 炜,帅世渊
(浙江理工大学 信息学院,杭州 310018)
遥感技术(remote sensing technique)是指通过自身辐射或反射的电磁波、可见光等对物体进行探测与识别.根据该技术所提供信息生成的地表遥感影像图,被广泛应用于自然灾害检测[1]、城市规划[2]与土地覆盖检测[3]等领域.通过对地表纹理、位置、阴影、形状、大小与物体空间位置等信息细致地观测,高分辨率遥感影像可以清楚地表达表纹理与空间信息的特征,为提取城市信息提供服务,因此探索深度学习语义分割网络模型在高分辨率遥感影像中的应用具有重要研究价值与意义.
高分辨率遥感影像含有丰富的地理信息,利用传统机器学习对遥感影像特征分析与特征提取的过程都具有一定复杂性,不能够有效地对空间结构与物体边缘特征进行提取,有显著的局限性.而深度学习网络模型有学习能力强、覆盖范围广与可移植性好等优点,能够通过神经网络模型对空间特征与物体边缘特征进行提取,可以有效解决上述问题,使得深度学习对遥感影像语义分割的研究成为焦点,有助于改善高分辨率遥感影像的分割精度.潘等人[4]采用随机森林回归机器学习算法对建筑物进行提取,从视觉显著性的角度分进行分析,可以有效地提取建筑物;黄等人[5]提出改进迭代条件模型的遥感影像语义分割方法,首先对遥感影像使用L0 梯度最小化模型去噪,然后使用迭代条件模型,再更新遥感影像中每个点的标记,实现对遥感影像语义分割,提升了物体整体的分割效果,但是得到的遥感影像还是存在椒盐问题;李等人[6]提出基于深度残差网络的高分辨率遥感影像分割方法,该方法通过运用深度残差与全卷积网络进行端到端语义分割模型的构建,并在全卷积网络中引入空洞卷积,解决分割粗糙问题,在小尺度对象上也具有较好的分割效果.苏等人[7]提出一种基于UNet 改进的深度卷积神经网络,分为预训练阶段与训练阶段.预训练阶段对以影像进行翻转、色彩调整与加噪等处理,实现对数据集的扩充.训练阶段把每个类地物转换为二分类模型进行目标训练,随后将各个分类子图进行连接生成最终的语义分割图像,采用集成学习的策略提高分割精度.这些方法在一定程度上都提升了分割精度,但存在着一些不足之处,例如空间信息丢失,细节信息被忽略等问题,而反卷积神经网络模型[8]可以利用上池化与反卷积结构有效解决上述问题,优化模型的分割效果.然而反卷积网络对预测小物体分割仍存在分割精度不足,需进一步研究与探索.
针对上述问题,本文提出新的方法,利用编码结构与解码结构对应特征层连接的方式与数据预训练模型对反卷积网络模型优化,有效对遥感影像物体空间信息、边缘信息与像素之间的关系进行处理,提高了模型的分割精度.
1 反卷积网络
反卷积网络(Deconvolutional Networks,DeconvNet)语义分割模型分为编码与解码结构,且对称.在编码与解码过程中,分别进行下采样与上采样,如图1为下采样与上采样结构,池化(Pooling)代表下采样,上池化(Unpooling)代表上采样.池化可以通过提取单一的值对当前感受野去噪,且保留有效的信息,有助于分类.但是在池化过程中,其空间信息会丢失,导致预测不精确.对于这个问题,模型中运用上池化层和反卷积层来防止空间信息的丢失.池化层使用switch variables 记录池化索引的位置,在上池化中利用switch variables索引记录的位置,映射到对应的空间位置来保留空间信息,从而提升图像分割精度.
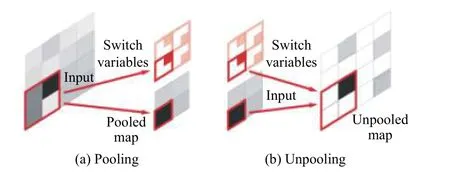
图1 下采样与上采样结构
在上池化产生稀疏特征图,反卷积通过多个滤波器学习[9],使最终结果更加的准确.图2为反卷积两种实现方式[10],图2(a)表示边缘填充零,图2(b)表示间隔填充零.
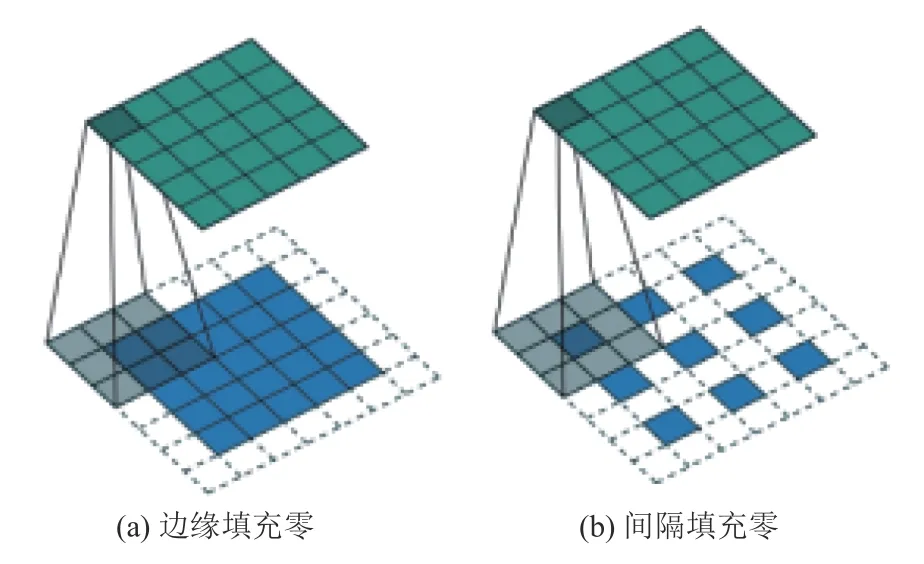
图2 反卷积的方式
2 改进反卷积网络
本文根据文献[11]中特征层连接的方法,提出了改进反卷积网络模型,并将模型分为编码与解码两部分:编码部分由5组结构组成,且均含有卷积层、BN层与池化层;解码部分也由5组结构组成,都含有上池化层、反卷积层、BN层与设计的连接层.改进反卷积网络模型的结构如图3所示,图中矩阵框与下方数字表示特征图和其维度.黑色箭头表示卷积+BN+ReLU、池化、上池化、反卷积+BN 以及反卷积+Softmax 等操作.下文将详细介绍网络的各层结构.
2.1 预处理
由于原始遥感图像偏大,直接把原始图像输入到神经网络中,需要消耗大量的内存和显存,所以要进行预处理后作为输入层,本文选择的预处理后遥感图像尺寸为512×512像素三通道图像.
2.2 编码结构
对于编码结构的设计,本文采用5组结构大致相同,参数略有不同的卷积,每组包含多个卷积层.以第1组编码结构(第2层到第3层)为例进行详细介绍.第2层使用64组3×3×3的卷积核,在卷积时,对输入层图像进行上下左右边界进行像素扩充,扩充像素值设置为0,卷积的步长设置为1,卷积后产生64个特征映射图.然而卷积操作是线性操作,为了让模型非线形拟合的能力,本文使用的激活函数为ReLU (Rectified Linear Units),来增加模型的非线性能力:

在每次卷积后,还需要对得到的特征图进行BN[12](Batch Normalization)操作,目的是对特征图进行归一化处理.第3层的卷积和前一层类似,不同的卷积层可以提取不同特征.表1中列举第1组编码结构参数的设置.
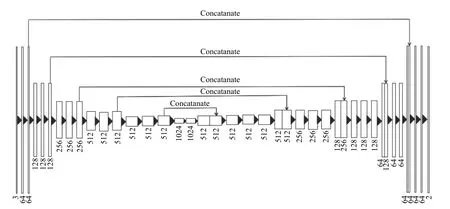
图3 改进反卷积网络模型结构

表1 编码第一组结构
第4层是池化层.由于卷积产生的特征图将会占用大量内存空间,导致模型训练困难,可以利用池化操作来解决这个问题,不仅降低特征向量的维度,而且有效防止过拟合.池化层采用2×2的核,步长为2最大池化,即每4个相邻的像素中保留最大的值,将卷积层的特征图尺寸缩小为0.25倍.
其他4组的编码结构和第一组类似,依次进行卷积与池化操作,第5组最后得到512个64×64个特征图.在第5组末尾面增加两个卷积层,进一步进行特征的提取,第一个卷积层使用的是7×7的卷积核,产生1024个特征图.第2个卷积层使用1×1的卷积核,最终产生1024个10×10特征图.
2.3 解码结构
解码结构目的是把特征图还原为原始尺寸,通过上池化、反卷积与设计的连接层,能够对空间信息与物体边缘特图有效提取.在反卷积的过程中,设置卷积的滑动窗口大小为3×3,步长为1.解码结构首先是一个反卷积层与5组反卷积结构组成,每组对应多个反卷积层、一个上池化层与一个连接层.这一个反卷积层产生512个16×16特征图.其余5组反卷积结构,以第一组解码结构为例进行详细地介绍.首先对512个16×16特征图进行上池化,得到512个32×32特征图,然后与编码结构第五组最后一层卷积进行特征连接,此时特征图变为1024个,经过3次反卷积操作之后,得到512个32×32密集的特征图.接着对第二组解码结构进行相同的操作,以此类推.表2为解码结构每组最后一个反卷积层的尺寸.
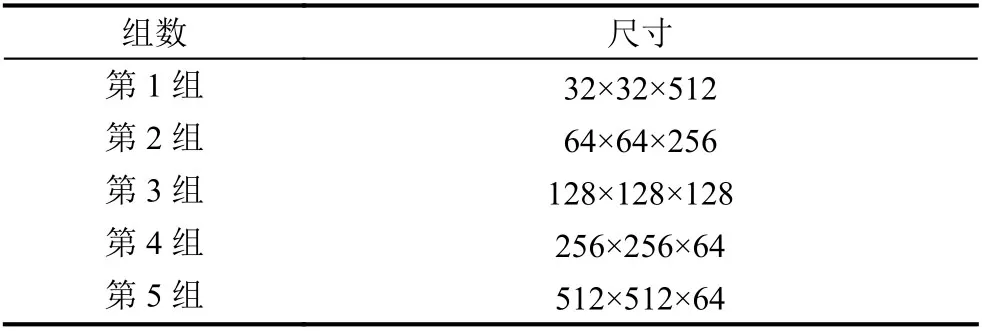
表2 解码结构各组尺寸
最后通过反卷积操作,得到512×512×2的特征图像.
2.4 网络模型的参数设置
对于建筑物像素级别分类,属于二分类任务.通过Softmax 将每一个像素点值映射为一个概率值,从而确定每一个像素值是否属于建筑物类,达到像素级别的预测,即:
其中,pi代表当前分类的概率值,yi代表当前预测的值.
损失函数选择是非常关键的,它是BP算法[13]的核心部分,也是用来衡量预测值和标签值之间的差异,通过计算误差,将得到的误差进行反向传播.网络模型在训练过程中使用交叉熵[14]作为损失函数,可以有效地对模型进行预测,交叉熵的损失函数如下:

其中,n代表类别,yi代表label的真实值,代表为预测值.
3 结果与分析
3.1 实验环境
本次实验采取ubuntu 下的keras 深度学习框架,使用Pycharm软件进行程序编写,实验平台的配置如下:CPU为Intel(R)Pentium(R)CPU G3260 @ 3.30 GHz,GPU为NVIDIA GTX 6G,1 TB 硬盘.
3.2 数据预训练模型
数据集是马萨诸塞州建筑物拍摄的遥感影像[15],每幅图像的大小为1500×1500像素,数据集覆盖了城市、郊区和农村地区,面积超过2600平方公里.由于原始遥感影像较大,需要对图像进行预处理,产生符合网络输入的大小.这里运用了对数据集进行动态扩充的方法,动态地进行训练.在训练时,通过随机scale的方式,进行动态加载,让模型消除欠拟合或过拟合.图4为数据预处理过程,首先对原始遥感影进行随机的scale,再进行随机翻转或旋转遥感影像,这时得到的遥感影像不符合网络模型的输入图像大小,需要对图像进行裁剪,得到符合模型的输入图像.然而在每次迭代结束时,就需要重新获取输入图像,从原始遥感影像到输入图像的过程,实现对数据集的扩充.这样做的目的是为了不断有新的数据加载到模型中,提高模型的分割效果.
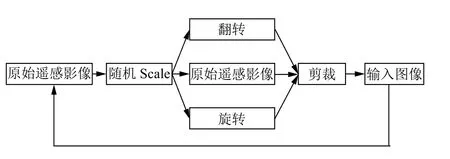
图4 数据的预处理
3.3 评价指标
评价指标是用来评估不同算法在某一方面的效果是否最佳,这样可以帮我们对算法进行不同程度的优化.为定量分析图像语义分割精度,本文采用像素精确度、召回率、准确率来对模型评估.
像素精确度定义为预测正负样本正确个数的和总样本个数的比值.

召回率定义为预测正样本正确个数和标注图像中正样本总数的比值.

准确度定义为预测正样本正确的个数和预测为正样本的总数的比值.

F1定义为召回率和准确率的调和均值,是综合考虑召回率和准确率的指标.

上述公式中,F1为真正例,代表的是正样本预测结果为正确的数目;FN为假反例,代表的是负样本被预测为正样本的数目;TP为假正例,代表的是正样本被预测为负样本的数目;TN为真反例,代表的是负样本预测结果为正确的数目.
3.4 结果分析
如图5曲线图代表使用改进的反卷积网络模型在马萨诸塞州建筑物拍摄的遥感影像数据集进行训练的像素精确度和损失函数曲线,图5(a)代表的是像素精确度,在模型训练到400次epoch的时候,训练集上的精确度为96%左右,测试集上的精确度达到95%左右,达到良好的效果;图5(b)代表的是损失函数曲线,模型在训练400次左右的时候趋向于平稳且在0.1附近.
图6中对标注图像与改进DeconvNet、DeconvNet和UNet网络测试集上两组图像进行比较.从图中可知改进DeconvNet 建筑物提取比其他模型的效果要好,充分说明改进DeconvNet 能有效的对建筑物进行提取.
从表3为评估模型的指标,在建筑物数据集上改进DeconvNet网络模型的综合指标要高于DeconvNet和UNet网络模型,说明通过特征连接和数据的动态训练,可以有效提高模型的分割精度.
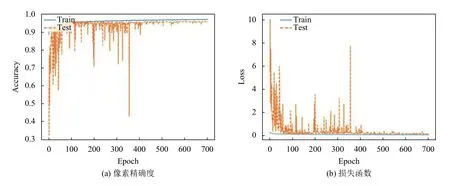
图5 精确度与损失函数曲线图
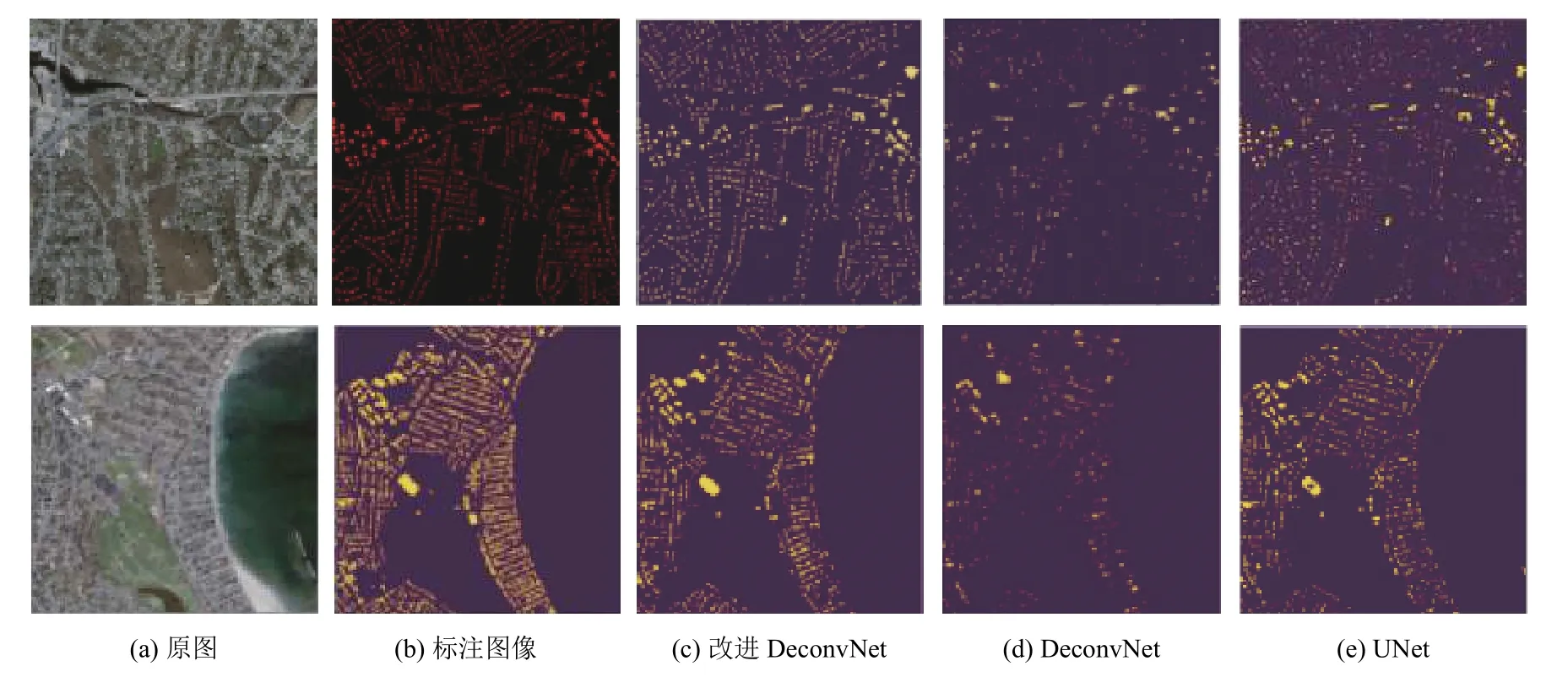
图6 模型效果对比
4 结论
针对传统神经网络模型对遥感影像中小物体语义分割精度不足的问题,本文采用编码与解码结构特征连接的方式改进反卷积网络,有效地提升了小物体分割精度,同时提出数据预训练模型,对数据进行动态加载,解决了网络模型过拟合问题.在公开数据集上的实验结果表明,相比于DeconvNet和UNet模型,改进DeconvNet模型能有效处理遥感影像的物体空间信息、边缘信息与像素之间的关系,并有较好的像素准确率.
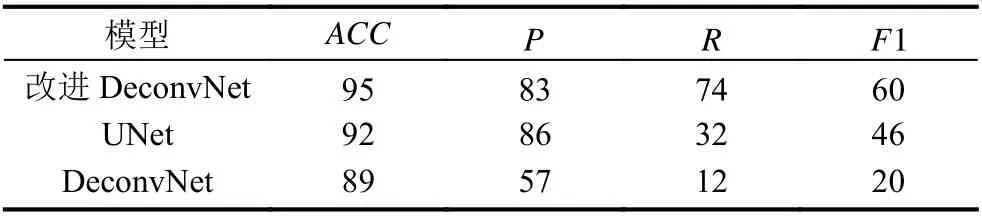
表3 网络模型评估标准对比(单位:%)
猜你喜欢
农业工程学报(2022年12期)2022-09-09
小学生学习指导(中年级)(2021年12期)2021-12-30
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
计算机系统应用(2021年9期)2021-10-11
昆明医科大学学报(2021年4期)2021-07-23
南方周末(2019-12-19)2019-12-19
中国外汇(2019年19期)2019-11-26
南方周末(2019-07-18)2019-07-18
南方周末(2019-05-09)2019-05-09
