
一种关于智能车多模式切换跟车控制方法的论述
2020-07-24 10:17:04雷永富赵松岭王红余陶华胜
汽车电器 2020年7期
雷永富,赵松岭,王红余,陶华胜
(奇瑞商用车 (安徽)有限公司,安徽 芜湖 241000)
1 研究背景
近年来,随着国民经济的快速增长,我国的人车数量呈井喷式增长。随着汽车数量的增加,交通事故越发频繁,伤及的人数、损失的财物也成倍增加。2012年,据卫生部门统计数据,死于机动车辆交通事故的人员多达166906人,是10年前的两倍多。而国家统计局给出的交通事故发生总数为196812例,事故直接财产损失则达到107543万元 (数据来源:中国卫生统计年鉴)。研究表明:事故发生的主因在于疲劳驾驶,其是导致交通事故的重大隐患,此外,汽车数量剧增的同时,交通堵塞问题更加严重。目前,交通堵塞已成为全球各大城市的“通病”,道路通行效率的降低给世界各国带来了惨重的损失。
为解决上述问题,当前各大汽车生产主机厂在中高端车型上都搭载了纵向速度控制系统。目前市场上应用最广泛、技术较成熟的两款纵向控制系统是ACC(自适应巡航控制)系统和CA(避撞控制)系统,它们是将车辆自动驾驶纵向控制系统的功能具体化,突出不同的性能指标而形成的两个典型系统。
定速巡航控制系统以自车速度控制为主,可使车辆保持预设速度稳定行驶。①ACC是定速巡航控制系统的延伸,当雷达探测到低于前车时,ACC系统会从速度控制转换为距离控制,通过控制节气门或者制动器,保持安全距离跟随前车行驶。ACC系统将驾驶员从疲劳驾驶中释放出来,更多地考虑了驾乘舒适性。②CA系统,在前方无其他车辆时,也是进行速度控制,维持恒定速度行驶。当前方发现车辆,已设定速度不能安全行驶时,CA系统将向驾驶员发出警告;当前车紧急制动或前方发生交通事故,驾驶员来不及应对,CA系统将控制制动器进行自动制动,避免发生碰撞事故。总的来说,CA系统优先考虑安全性,以间距控制为主。以上两款系统的共同点可知,车辆自动驾驶纵向控制系统就是通过自动控制器,实现车辆纵向运动的控制,关键技术包括:车辆速度控制和车辆间距控制。
本文兼有上述两种系统的功能,能够根据行驶过程中所遇到的工况,自主实现多模式切换,实现车辆速度和车距的控制,提出地控制策略可完成巡航模式、接近模式、跟车模式和避撞模式的切换控制,以分别实现对设定速度的跟随、平稳接近前车、安全跟车行驶和主动避撞。它对危险工况的响应速度快,避撞控制精确、有效,可最大限度避免事故发生、减轻人员伤亡;保证行驶安全的前提下缩短车间距离,可有效提高道路通行率;自动驾驶代替驾驶员操控车辆,可缓解驾驶疲劳,也有助于减少因驾驶疲劳而引发的交通事故。
通常环境复杂,驾驶员驾车随机性大,因此,车辆在道路上行驶可能会遇到各样的行驶工况,总结起来可以分为6种工况:巡航行驶工况、接近前车工况、跟车行驶工况、目标车切入工况、目标车切出工况、避撞工况,如图1所示。
通过对实际行驶工况进行分析,目标车切入工况可按照两车速度、间距和加速度的不同情况分别纳入接近前车工况、跟车行驶工况或避撞工况。而目标车切出后,主车可以过渡到巡航行驶工况、接近前车工况、跟车行驶工况或避撞工况。因此,本专利将纵向控制系统的工作模式划分为巡航模式、接近模式、跟车模式和避撞模式,并分别制定了各模式的控制策略和模式切换控制逻辑。
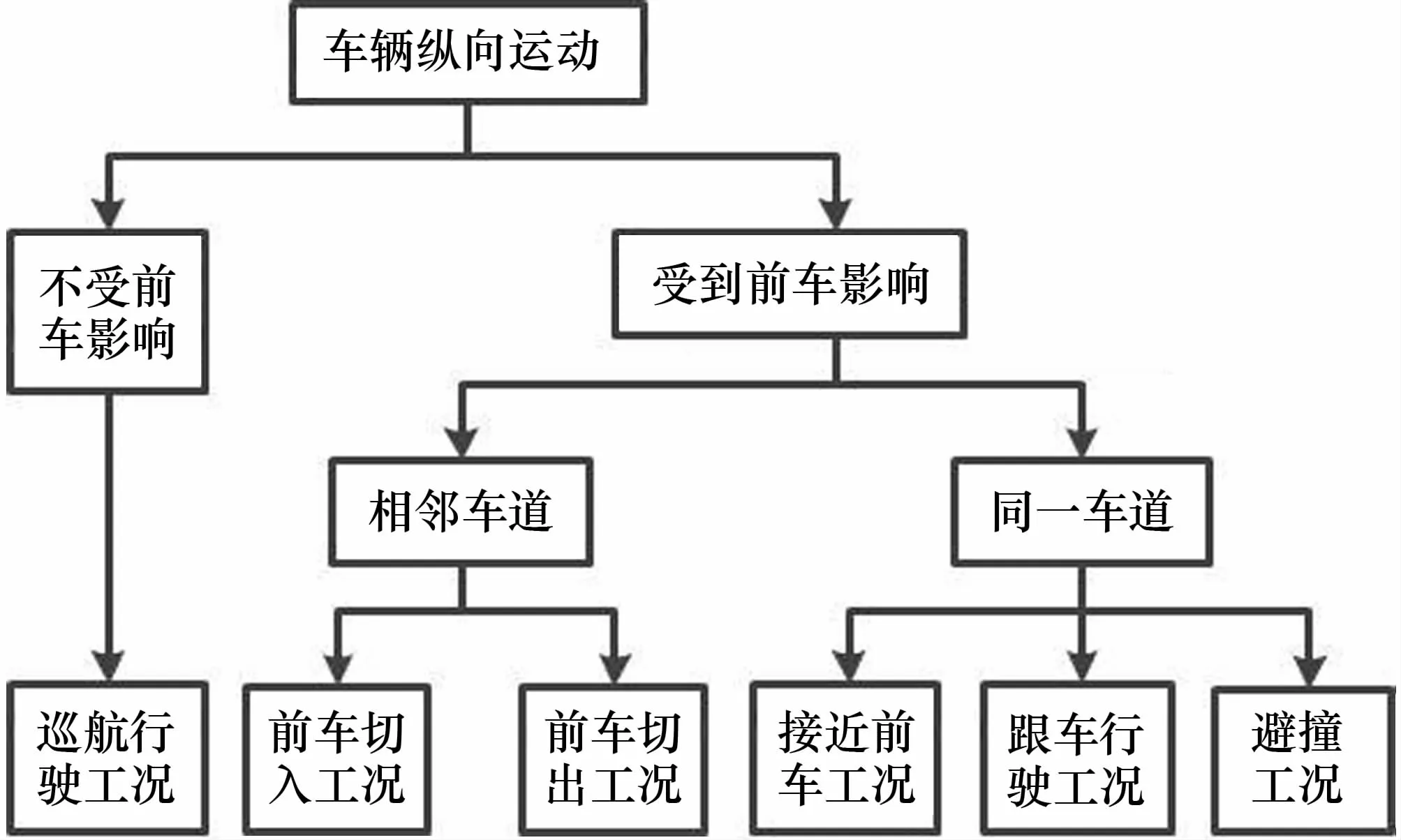
图1 车辆纵向行驶工况示意图
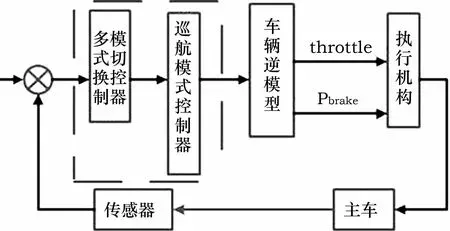
图2 定速巡航模式控制框图
2 工作模式
2.1 巡航模式
巡航模式以驾驶员预先设定的巡航车速为控制目标,以速度误差为控制变量,最终实现车辆以巡航车速稳定行驶。充分考虑驾乘人员对舒适性的需求,以驾驶员模型为基础,并采用模糊理论进行控制策略设计。定速巡航模式控制框图如图2所示。
2.2 接近模式
车辆处于巡航模式,当车载雷达在有效探测距离内发现低速目标车,为了符合驾驶员操纵习惯,实现平稳地靠近前车,并过渡到跟车行驶模式,系统将自动进入接近模式。此工况下,主车速度大于目标车速度,车间距离大于安全跟车距离,从驾驶员模型考虑,接近模式的控制策略就是利用速度差平衡距离差,最终使速度差和距离差都趋近于零。接近模式示意图如图3所示。
2.3 跟车模式
跟车模式以安全跟车距离Dsafe为控制目标,以速度误差Verror和距离误差Derror为控制变量,最终保持Dsafe稳定跟随目标车行驶。稳定跟车行驶过程,突遇危险情况,驾驶员可转向避撞;如果驾驶员没有采取任何操作,自动控制系统将车进入避撞模式进行车辆控制。而在一般行驶情况下,车辆处于安全行驶环境,在设计控制策略时可兼顾驾乘舒适性。本文采用模糊理论进行控制策略设计。跟车行驶模式控制框图如图4所示。
2.4 避撞模式
行驶过程突遇危险情况,比如跟车行驶过程中前车紧急刹停;或两相邻车道低速车辆切入同一车道,两车速度差极大,车间距离非常小。这种危险行驶工况下,驾驶员可以采取转向避撞或自行实施强力制动避撞。但是,如果驾驶员反应慢或者根本没有采取避撞措施,势必会发生追尾。而装载纵向控制系统的车辆,以驾驶员模型为基础,进入避撞模式,根据两车之间的相对距离实施制动控制,最大限度降低事故发生率和人员伤害。控制策略表述如下。

图3 接近模式示意图

图4 跟车行驶模式控制框图

Dr 本文提及的多模式控制系统总共包括4种控制模式,实施过程中以两车相对距离Dr、安全跟车距离Dsafe、避撞距离Dbrake、目标车速度Vt、主车设定速度Vset、主车实际速度Vs、前车加速度at等参数为逻辑判断依据,以车辆间距的区域划分为基础,制定如下的控制逻辑执行过程,详细的流程图如图6所示。 图5 车辆间距的区域划分 本文将纵向控制系统的工作模式划分为巡航模式、接近模式、跟车模式和避撞模式,并分别论述了各模式的控制策略,来实现综合的多模式切换纵向控制。能够根据行驶过程中所遇到的工况,自主地实现多模式切换,实现车辆的速度和车距的控制。可缓解驾驶疲劳,也有助于减少因驾驶疲劳而引发的交通事故。 图6 控制逻辑执行过程2.5 总体控制策略

3 总结

猜你喜欢
能源工程(2020年6期)2021-01-26 00:55:22
公民与法治(2020年17期)2020-10-27 02:27:52
小雪花·成长指南(2020年2期)2020-10-12 02:39:11
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
时代汽车(2018年4期)2018-05-31 02:53:08
山东青年(2017年7期)2018-01-11 16:09:15
通信电源技术(2016年1期)2016-04-16 04:57:26
灾害医学与救援(电子版)(2016年4期)2016-03-11 20:18:15
幼儿智力世界(2009年2期)2009-03-10 06:49:44
