分布式驱动电动汽车横摆稳定性控制探讨
2020-07-23 16:23叶磊
汽车世界·车辆工程技术(中) 2020年3期
叶磊
摘 要:分布式驱动电动汽车与内燃机汽车相比,其取消汽车结构中冗长的传动链,直接对各个车轮进行控制。为了确保分布式驱动电动汽车在运行期间的安全性与稳定性,要加强对横摆稳定性控制内容的探讨。将分布式驱动电动汽车作为研究对象,针对横摆稳定性控制内容进行深入分析。
关键词:电动汽车;安全性;稳定性;控制措施
1 分布式驱动电动汽车
分布式驱动电动汽车(下文统一简称为电动汽车)主要分为驱动桥式、电动轮驱动构型、动态吸振驱动形三种,类型不同,其性能和特点也不同,但是,无论是哪一种类型的驱动电动汽车,其传统的内燃机汽车相比,都具有车内空间大、动力学控制性能好、最小转弯半径缩小、车身整体重量轻等多项优点[1]。但是,需要相关人员研究注意的是,横摆稳定性控制是电动汽车中一项重要内容,因此,在设计与生产驱动电动汽车时,要加强对该项问题的分析,确保最终制造的汽车具有良好的性能,可以满足应用需求。
2 电动汽车横摆稳定性控制结构
横摆稳定性控制结构一共分为以下两种:集中式,在该类型的控制结构中会出现反应速率降低,以及各项控制量出现相互抵消情况;分层式,在类型的控制结构中,对于各项数据内容的计算都是相互独立的,完成相应的计算后,及时、准确的将通过计算获取到的结果及时传到相应的执行机构中,从而确保车辆在运行过程中的稳定性能够满足需求,提高舒适度,减少安全事故的发生[2]。
以模型跟踪控制思想为基础的电动汽车横摆稳定性控制的主要包括的内容如下:
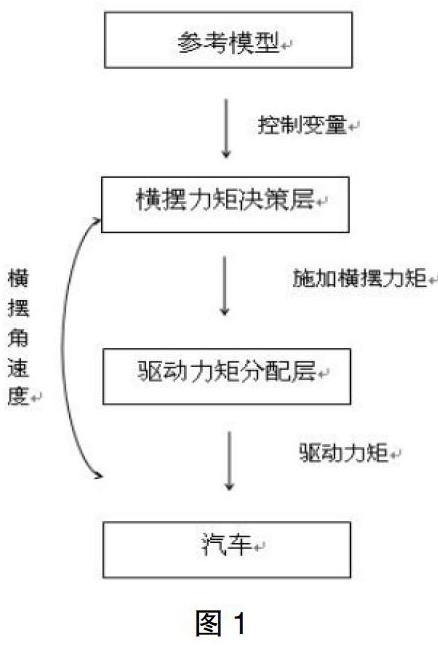
(1)参考模型。该模型在具体应用期间的作用就是准确的将汽车的是状态和驾驶员的具体操作情况转变为理想横板角度响应,从而使运动跟踪控制能够具有的一个合理的跟踪目标。
(2)横摆力矩决策层。该决策层在电动汽车运行发挥的作用和就是依据电动汽车中与稳定性相关的各项状态信心内容,对计汽车稳定性控制时需要施加的横摆力矩大小进行计算,同时,对参考模型在应用期间的输出内容进行跟踪。
针对横摆力矩决策层,在对其进行设计时,可以采取可拓协调控制方式完成对其的设计,通过对这种设计方案的应用,使汽车在行驶过程中的状态划分问题能够的都有效解决。将可拓展协调控制应用在电动汽车上,依据质心侧偏角与横摆角度速度的具体值与设计理想值之间的偏差的具体大小,完成对电动汽车具在实际行驶过程中具体状态的合理划分,不同行驶稳定程度对应的区域不同,而针对不同区域,可以采取不同方式完成相应的控制。
(3)控制分配层。依据电动汽车所需的目标力矩和施加的橫摆力矩情况,合理分配电动汽车四轮驱动力矩情况。
(4)执行层。该层从本质上来说就是控制分配层的一个“帮手”,其在电动汽运行中起到的作用就是让控制分配曾的输出在电动汽车中的每个车轮上得到体现。
电动汽车中的横摆稳定性分层控制结构如图1所示。
3 电动汽车横摆稳定性特种的各项参数内容
电动汽车在实际行驶期间,其具体状态时有汽车的纵向、横摆角、侧向速度共同决定的。而针对电动汽车来说,其横摆角度速度和质心侧的具体偏转角度能够实现对电动汽车横摆稳定性的描述,因此,下面针对这两项内容进行全面分析。
3.1 电动汽车行驶时的横摆角度速度
电动汽车的横摆角度速度大小会随着其在行驶过程中的速度改变而发生变化,主要体现在电动汽车在行驶期间,对稳定性上的准确描述,其可以能够精准反应电动汽车在行驶期间,航向角的具体变化速度,同时,也决定了电动汽车在转向上的具体特点,并且会对于电动气动的性能会造成直接影响。
电动汽车中采用的轮胎在位于线性区域时,与非线性区域相比,前者在实际操纵期间,具有性能好优点,也正是因为如此,在质心偏角相对较小的情况下,在对汽车横摆稳定性进行研究时,可以对线性二自由度参考模型进行应用,得到不同车速和方向盘转角条件横摆角速度。
3.2 电动汽车中的质心侧偏角
质心侧偏角在具体应用期间的作用就是描述电动汽车在行驶过程中保持的轨道足迹进行准确描述,精准反映电动汽车在进行转向时,与预定轨道相比,发生的偏离情况。
对于电动汽车中的质心侧偏角的具体大小,可以通过汽车侧向车速和纵向车速进行计算获取,该数值会对电动汽车轮胎侧向力的具体大小造成一定影响。如果质心侧偏角较小,此时,横摆力矩与之心侧偏角呈约180°,近似一条直线。质心侧偏角如果增大,电动汽车中横摆力矩则会从某一质心偏角不断变小,经过一段时间的变化后,最终将会在区域一个相对稳定性的状态,在该状态下,电动汽车驾驶员难以利用方向盘完成对电动汽车具体行驶情况的合理控制。
依据电动汽车侧向、纵向,以及横摆动力学之间的具体耦合关系,对电动汽车的具体行驶情况进行分析,通过分析可以发现,质心侧偏角会对纵向运动情况造成一定影响,特别是对横摆运动产生的影响尤为明显。在对电动汽车进行分析时,为了使该耦合问题能够得到解决,可以在对电动汽车具体情况进行全面分析基础上,构建四轮全驱线性二自由度解耦控制模型,对控制变量进行解耦处理,弱化不同变量之间的关联。
此外,为了使电动汽车质心侧偏校对信息为得到全面利用,以及精度偏低问题能够得到解决,相关研究人员可以在对扩展卡尔曼滤波方法进行应用的基础上,设计处一种可以用于对电动汽车质心侧偏角进行精准估计的状态的观测器,这也就使电动汽车转向稳定性得到了进一步提高。
4 结语
科技的快速发展使电动汽车逐渐成为了人们在出行过程中的一项重要交通工具,在对电动汽车进行研究时,要提高对横摆稳定性控制问题的探讨,确保最终制造的电动汽车能够满足应用需求。
参考文献:
[1]郭烈,葛平淑,孙大川,林肖.分布式驱动电动汽车紧急工况下稳定性控制[J].华中科技大学学报(自然科学版),2020,48(01):60-65.
[2]王子铭,刘勇,鲍俊屹.分布式驱动电动汽车转矩协调控制策略研究[J].汽车实用技术,2019(16):15-16+36.
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
中国水运(2022年4期)2022-04-27
内燃机与配件(2022年2期)2022-01-17
科技创新导报(2021年31期)2021-05-10
科技创新导报(2021年33期)2021-04-17
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
新农业(2018年3期)2018-07-08
电机与控制学报(2018年9期)2018-05-14
求知导刊(2017年22期)2017-10-13
投资北京(2016年6期)2016-05-14