
镜片智能检测的SCARA机械臂轨迹规划信息研究
2020-07-22 09:57崔鼎郝南海郭阳宽
数字技术与应用 2020年6期
关键词:机械臂
崔鼎 郝南海 郭阳宽
摘要:本文设计了用于镜片检测工序的SCARA机械臂系统并对其抓取镜片的轨迹规划进行了研究。搭建机械臂硬件系统并对比使用三次多项式插值算法和五次多项式插值法算法进行轨迹规划。实验结果表明五次多项式插值算法对机械臂运行冲击更小。
关键词:镜片检测;机械臂;轨迹规划;多项式插值
中图分类号:TP27 文献标识码:A 文章编号:1007-9416(2020)06-0000-00
0 引言
在工作的镜片检测工序中,工人需要从传输带上拿取镜片并放置到检测工作台上,待检测完毕后再放置传送带上。由于检测样品数量大、品种多,这种方法不仅耗时长、效率低。而且长时间的机械工作对工人的身体也会造成潜在的危害[1-2]。鉴于机械臂工作具有高精度、高效率、高实时性等优点[3],本文设计了一款用于镜片检测工序的SCAR机械臂系统。
1 SCARA机械臂系统设计
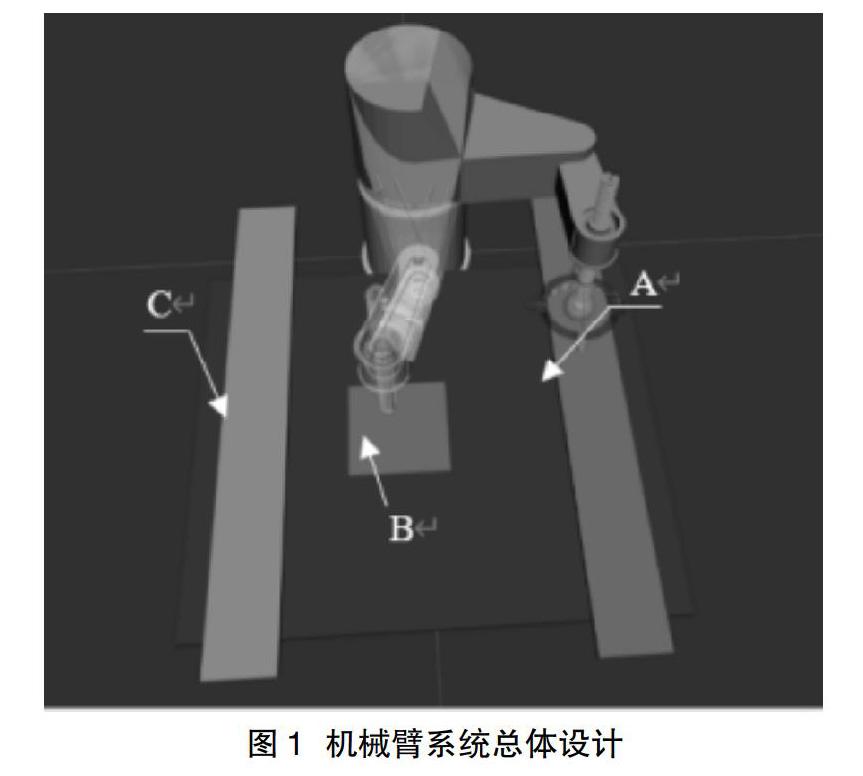
机械臂系统总体设计如图1所示。由传送带A和C、检测台B、机械臂、计算机组成。当镜片由传送带A输送到检测台B时,机械臂末端通过吸盘抓取镜片运动到检测点进行检测。检测完毕后,机械臂根据检测结果抓取镜片置到传送带C送走。
2 机械臂轨迹规划
当起始点到目标点中间的路径没有障碍物时,以机械臂的轨迹为研究对象,采用三次多项式插值法和五次多项式插值法分别对其进行轨迹规划,通过对比两种插值法的效果,选取效果更优者对SCARA机械臂进行轨迹规划。
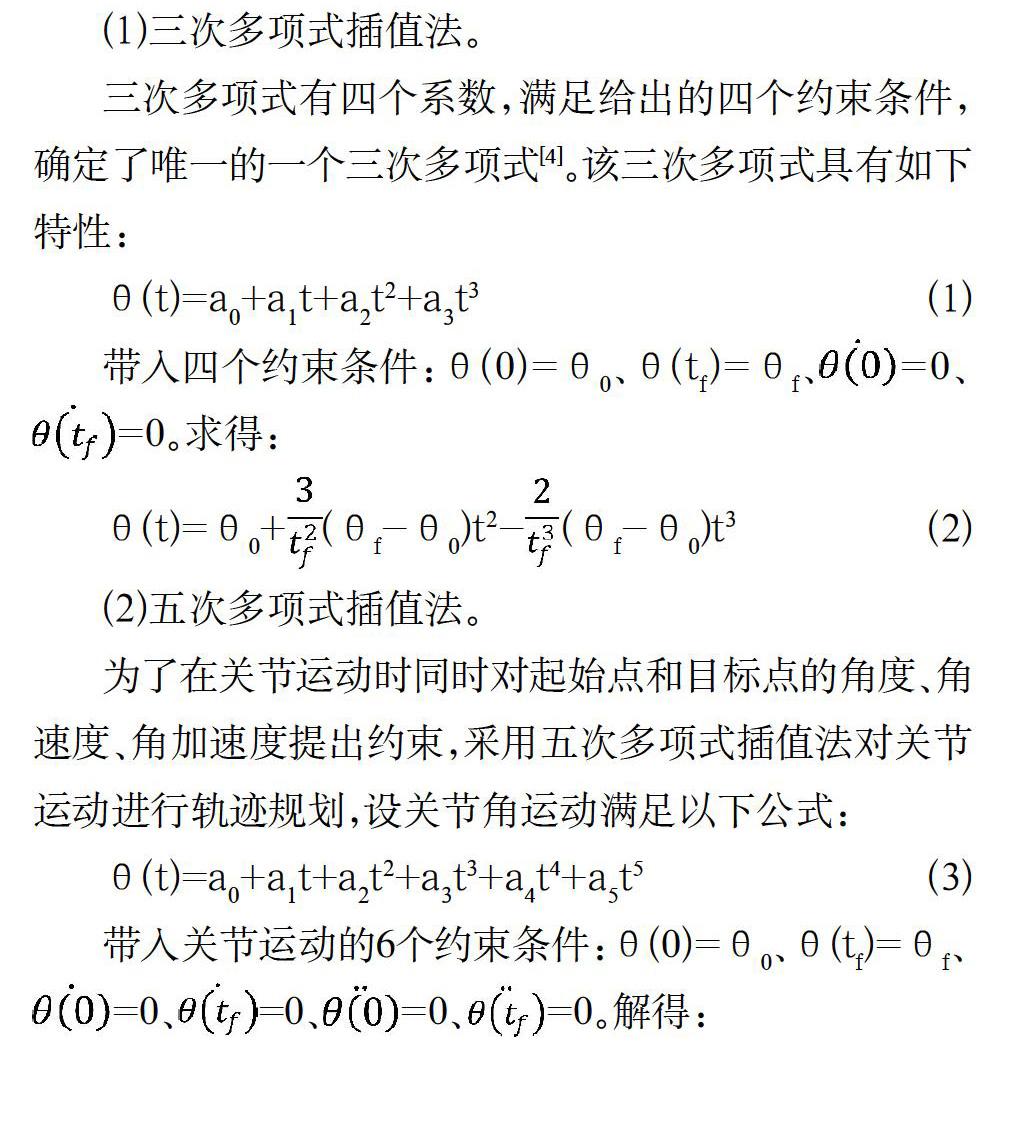
(1)三次多项式插值法。
(2)五次多项式插值法。
为了在关节运动时同时对起始点和目标点的角度、角速度、角加速度提出约束,采用五次多项式插值法对关节运动进行轨迹规划,设关节角运动满足以下公式:
3 实验与分析
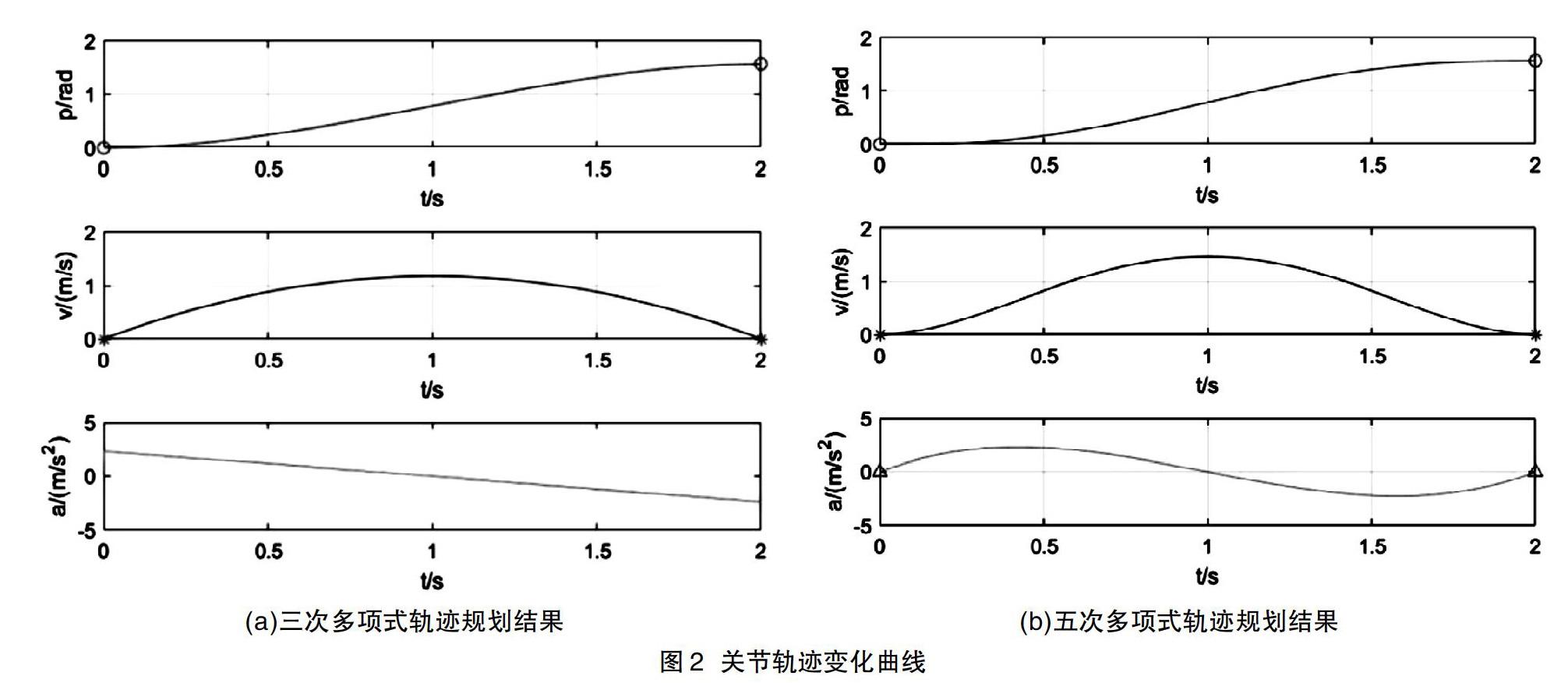
规定机械臂在2s内从0运动到1.57rad,图2为关节轨迹变化曲线。可以看到三次多项式轨迹规划的角位移、速度曲线都是光滑的,但是加速度在开始和结束的时候并不为0,意味着机械臂运动的开始和结束存在运动突变;五次多项式轨迹规的角位移、速度曲线均光滑,加速度在开始和结束的时候为0,意味着机械臂运动的开始和结束不存在冲击了。
4 结语
本文完成了用于镜片检测的SCARA机械臂系统的搭建。针对机械臂抓取镜片从传送带运动到检测点的轨迹规划问题。实验表面,五次多项式插值法规划的轨迹的角度、角速度、角加速度曲线更平稳,对机械臂的冲击更小。
参考文献
[1] 高峰,郭为忠.中国机器人的发展战略思考[J].機械工程学报,2016,52(7):1-5
[2] 王卓.树脂镜片制造企业产品国产化项目的计划与控制的研究[D].上海:上海交通大学,2015.
[3] Anonymous.Eureka;Shape-shifting robot plane offers safer alternative for maritime rescue[J].NewsRx Health & Science,2018,42(20):75-76.
[4] 李芳,顾海巍.喷涂机器人运动学与轨迹规划算法研究[J].组合机床与自动化加工技术,2017(12):25-28+32.
收稿日期:2020-04-14
作者简介:崔鼎(1992—),男,江苏盐城人,硕士,研究方向:机器人及其控制。
通讯作者:郝南海(1963—),男,山东威海人,博士,北京信息科技大学机电工程学院教授,研究方向:先进制造技术、工业工程。
猜你喜欢
科技与创新(2016年23期)2017-03-30
山东工业技术(2017年4期)2017-03-28
求知导刊(2017年1期)2017-03-24
计算机教育(2016年7期)2016-11-10
现代电子技术(2015年17期)2015-09-23
