
大深度水下滑翔机总体设计
2020-07-22 03:35:28叶鹏程黄桥高
数字海洋与水下攻防 2020年3期
叶鹏程,黄桥高
(1. 西北工业大学 航海学院,陕西 西安 710072;2. 无人水下运载技术工信部重点实验室,陕西 西安 710072)
0 引言
海洋开发和利用势必需要先进的海洋设备,水下航行器作为一种延伸人类对水下操作和感知能力的海洋开发和探测工具,获得了广泛关注[1]。水下航行器按是否搭载人员可分为载人水下航行器Manned Underwater Vehicle,MUV)和无人水下航行器(Unmanned Underwater Vehicle,UUV)[2]。按照操作方式的不同,UUV又可分为遥控水下航行器(Remotely Operated Vehicle,ROV)、自主水下航行器(Autonomous Underwater Vehicle,AUV)和水下滑翔机(Autonomous Underwater Glider,AUG)[3]。其中,MUV需要人工操作,不适合长时间、大深度航行。而ROV在使用过程中需要母船支援,虽然便于控制,但受缆绳限制,活动范围有限。由于摆脱了线缆束缚,AUV和AUG活动范围增大,并且可以在水下灵活使用[4]。AUV在使用过程中具有良好的机动性能,可以按照既定线路航行或定点作业,但是需要消耗大量能源,要求定时补充能源,因此无法保证大深度、远航程和长时间连续工作[5]。AUG则依靠自身浮力驱动,耗能极低,能够更好地进行海洋开发和利用。AUG不仅具有很好的机动性、可控性和隐蔽性,而且拥有制造成本低、功耗低、噪声低、航程远以及工作深度大等优势,符合长时间、大范围海洋探索需求[6-7]。
为了满足海洋军事需要和民用需求,本文介绍了一种水下滑翔机总体设计方法。在水下滑翔机外形设计的基础上,对主要组成系统进行布局,对壳体进行结构设计。完成滑翔机动力参数计算,对水下滑翔机进行动力学建模、运动特性分析及航行弹道仿真研究。
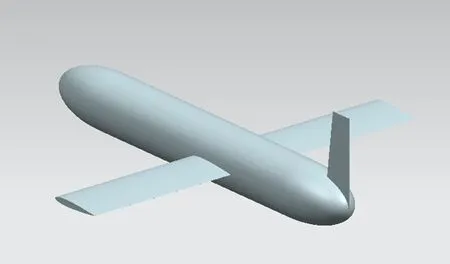
图1 AUG外形图Fig. 1 Shape of AUG
1 总体设计与布局
采用三维制图软件 Unigraphics NX(UG)对水下滑翔机进行外形设计,如图1所示。外形由主体、滑翔翼和稳定尾翼构成,总长1 800 mm,其中头尾部采用相同线型,均为半椭球体,中部为平行圆柱体,主体外形设计参数见表1。滑翔翼采用NACA0012翼型,设计参数见表2。稳定尾翼采用平面薄板。
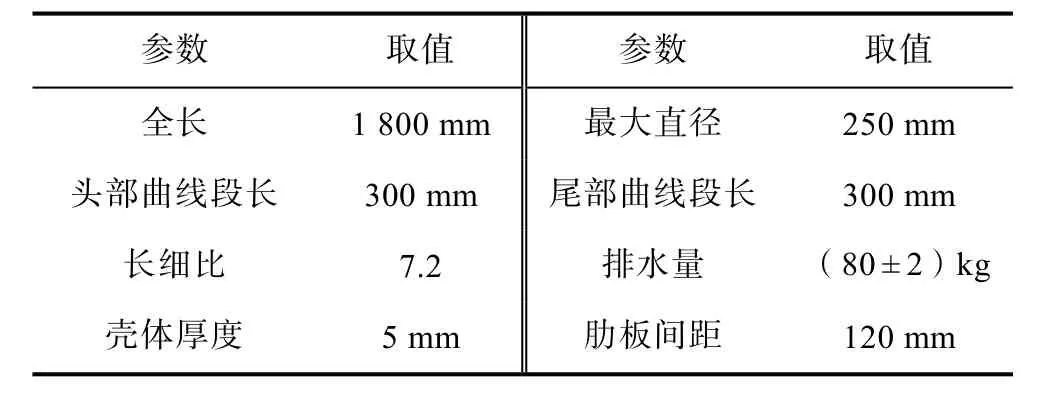
表1 主体外形设计参数Table 1 Design parameters of AUG body
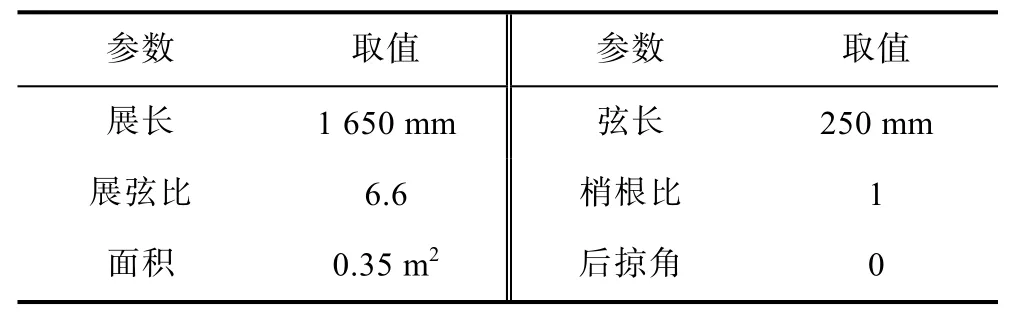
表2 滑翔翼设计参数Table 2 Design parameters of AUG wings
水下滑翔机主要由6大系统组成:外部耐压壳体、滑翔翼和尾翼、姿态调节系统、变浮力驱动系统、通信控制系统和抛载系统。其中,变浮力调节机构采用外部油囊式浮力调节机构,姿态调节机构选用滚珠丝杆电池块传动机构。各个系统的布局如图2所示。

图2 AUG总体布局图Fig. 2 Overall layout of AUG
2 受力分析与运动建模
2.1 坐标系的定义
为了描述水下滑翔机运动,本文定义3个坐标系[5],即地面坐标系O0x0y0z0、载体坐标系Oxyz(以载体浮心为原点),速度坐标系Ox1y1z1,如图3所示。水下滑翔机相对地面坐标系的姿态可用载体坐标系与地面坐标系之间 3个欧拉角θ、ψ、φ来确定。在体坐标系中的重心速度矢量方向则由攻角α、侧滑角β确定,如图4所示。

图3 3种坐标系示意图Fig. 3 Three kinds of coordinate systems
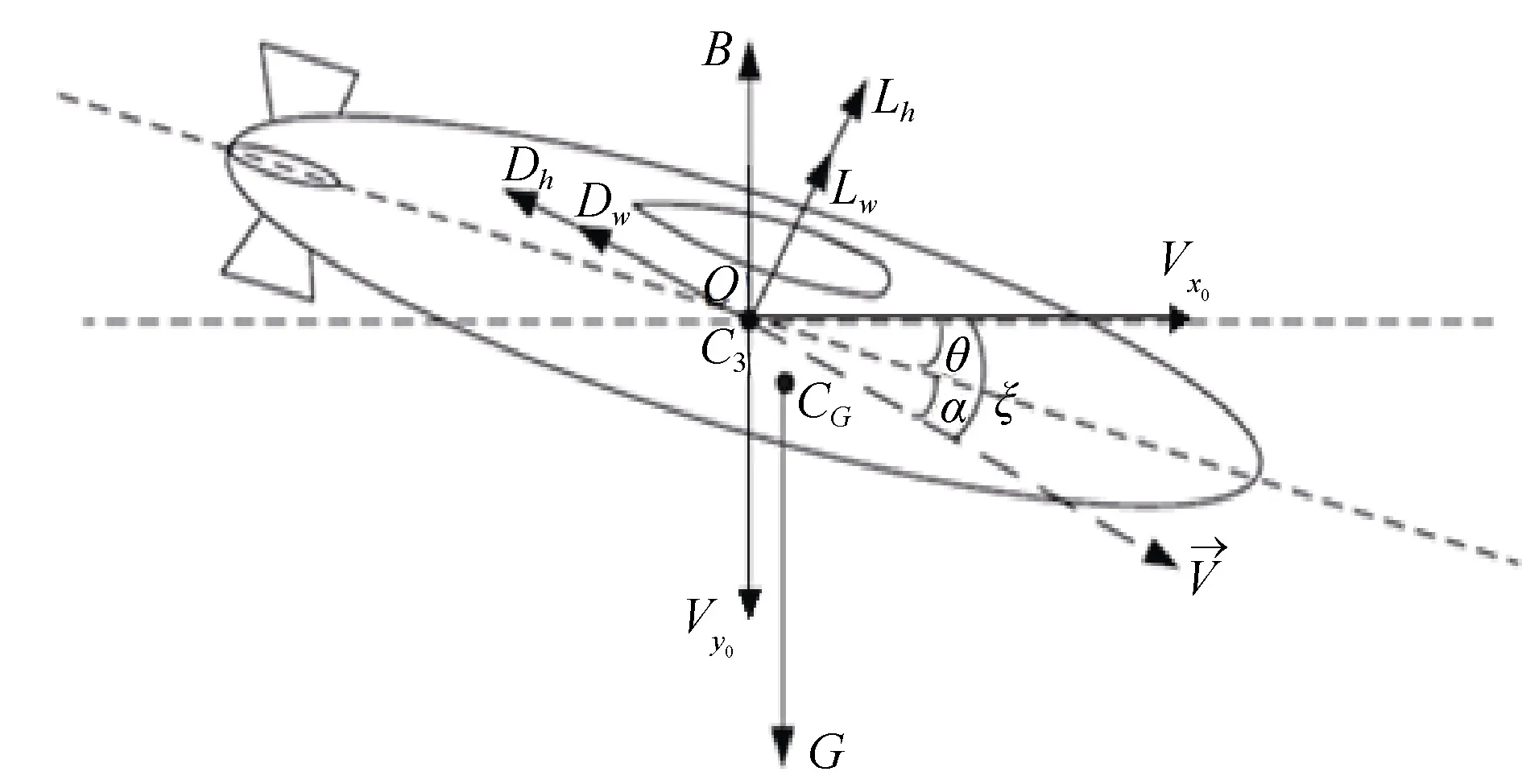
图4 重心速度矢量示意图Fig. 4 Velocity vector of the center of gravity
2.2 水下滑翔机数学模型
基于动量定理和动量矩定理建立空间运动方程较为复杂,本文对其进行简化并考虑航行器附加质量λ11、λ22、λ26、λ66,得到纵平面内的运动方程[8]

式中:m、m0分别为航行器质量和净浮质量;xG、yG分别为航行器的重心水平位移和垂直位移;vx、vy、wz分别表示航行器在地面坐标系沿x0、y0轴的水平速度、垂直速度和绕O0z0轴转动的角速度;D、L、M分别为水下滑翔机阻力、升力和俯仰力矩。
3 定常运动特性分析
定常滑翔是水下滑翔机的主要运动形式[9],研究其运动特性具有重要意义。当水下滑翔机作定常滑翔运动时,其运动参数满足如下条件:

式中,C为参数。
定常运动受力平衡方程如下:

水下滑翔机流体动力参数计算结果如表3所示。其在定常滑翔运动时基本处于小攻角状态,即cosα≈ 1 ,sinα≈α。采用数值软件MATLAB分析定常滑翔运动特性,具体关系如图5-10所示。
分析图7可知,随着弹道倾角ξ的变化,攻角α的变化是在一定范围内,不同水下滑翔机由于设计参数不同,有效攻角范围也不同。为了防止弹道倾角出现急剧变化,有效攻角需设定在安全范围之内,即±7°之间。水下滑翔机运动特性研究应该有针对性地在有效攻角范围内进行,从而避免大量仿真计算和试验,提高工作效率。
表3 流体动力参数计算结果Table 3 Calculation results of the hydrodynamic parameters

图5 Vx0和 ξ、m0关系Fig. 5 The relation amongand ξ、m0
图6 Vx0和m0关系图Fig. 6 The relation between and m0
图7 α与ξ关系图Fig. 7 The relation between α and ξ
分析图8可以发现:水下滑翔机攻角α受重心水平位移xG影响较大,随xG增大而减小,而净浮质量m0对攻角α影响较小。
图8 α与xG、m0关系图Fig. 8 The relation among α and xG、m0
分析图 9可以发现,重心水平位移xG对滑翔机俯仰角θ影响较大,θ绝对值随xG增大而增大,而净浮质量m0对俯仰角θ的影响较小。

图10 V与xG、m0关系图Fig. 10 The relation among V and xG、m0
由图 10可以看出,xG和m0对滑翔机速度V均有一定影响,速度V随xG和m0单调增加。
4 Simulink弹道仿真
本文研究的大深度水下滑翔机中,变浮力驱动系统采用改变外部油囊体积来改变净浮力。姿态调节系统则由步进电机带动蜗轮蜗杆减速,再传动给滚珠丝杆,由滚珠丝杆带动质量块滑动。假设变浮力调节系统匀速调整滑翔机外部油囊体积,即净浮质量m0是线性变化的,满足如下条件:

式中:dm为每秒钟变化质量;t0表示变浮力驱动系统有效工作时间。
另外,姿态调节系统每秒钟移动的滑动质量块的位移是一定的,即重心水平位移同样是线性变化的,满足如下公式:

式中:dx为每秒钟重心沿Ox轴的位移变化量;tG表示姿态调节系统工作时间。
利用 Simulink建立水下滑翔机弹道仿真模块程序,图11给出了仿真模型流程图。初始条件设置如下:速度V、俯仰角θ、角速度Wz、重心水平位移xG、净浮质量m0均为 0。控制条件和仿真结果分别见表4和表5。

图11 仿真模型流程图Fig. 11 Flowchart of simulation model

表4 控制条件Table 4 Control conditions

表5 仿真结果TABLE 5 Simulation results
使用 MATLAB对仿真所得数据进行分析,结果如图12-17所示。分析上述结果能够发现,在净浮质量为±2 kg,重心水平位移为±0.01 m条件下,水下滑翔机水平速度可以达到1 m/s以上,满足任务要求。另外,本文设计的水下滑翔机从下潜到上浮的过程转换大约需要40 s左右,一个完整的下潜上浮周期大约需要3 180 s,调整时间时间占总时间 1.25%。稳定状态下弹道倾角为±29.6°。
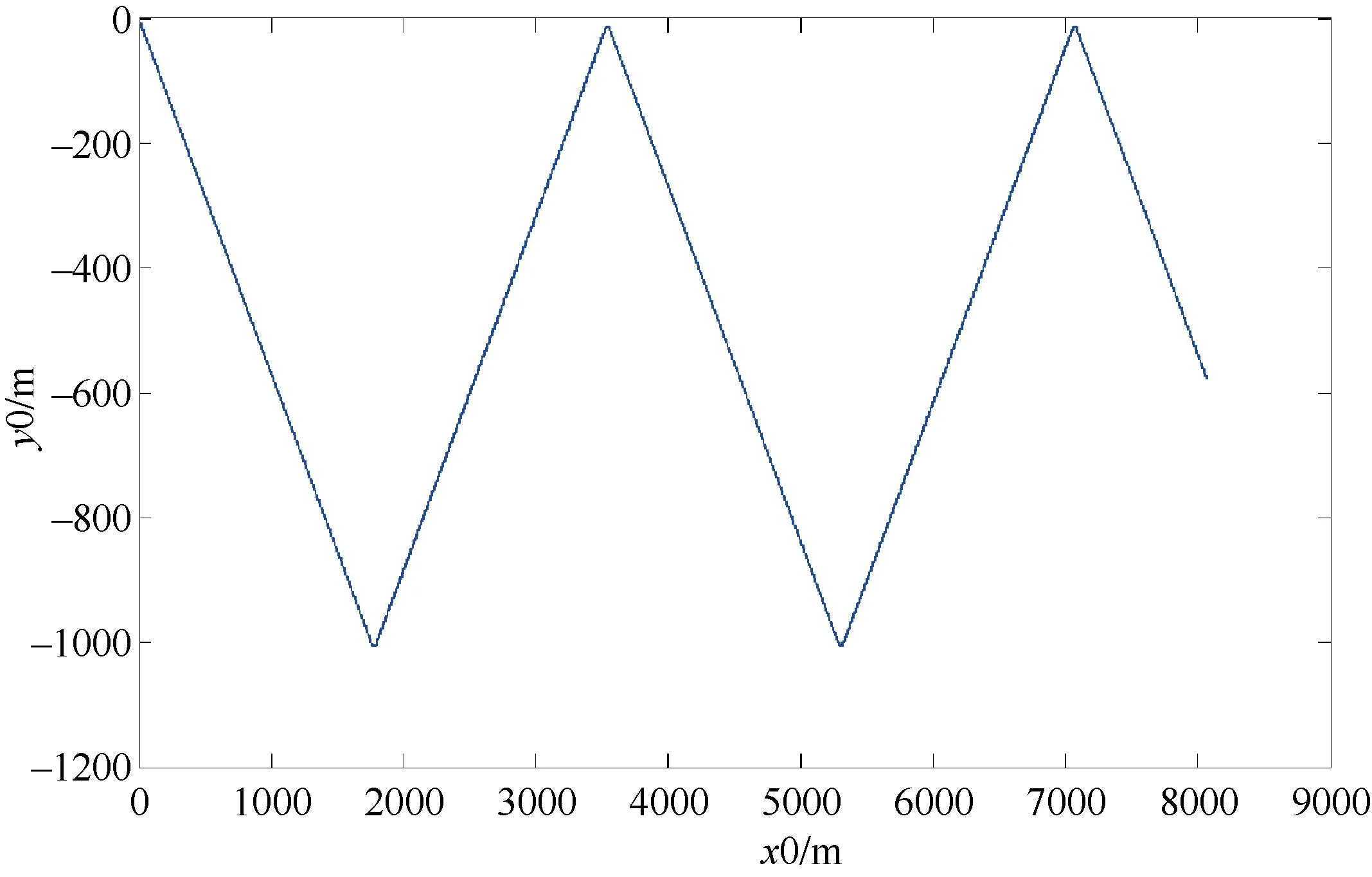
图12 水下滑翔机弹道图Fig. 12 Trajectory of AUG
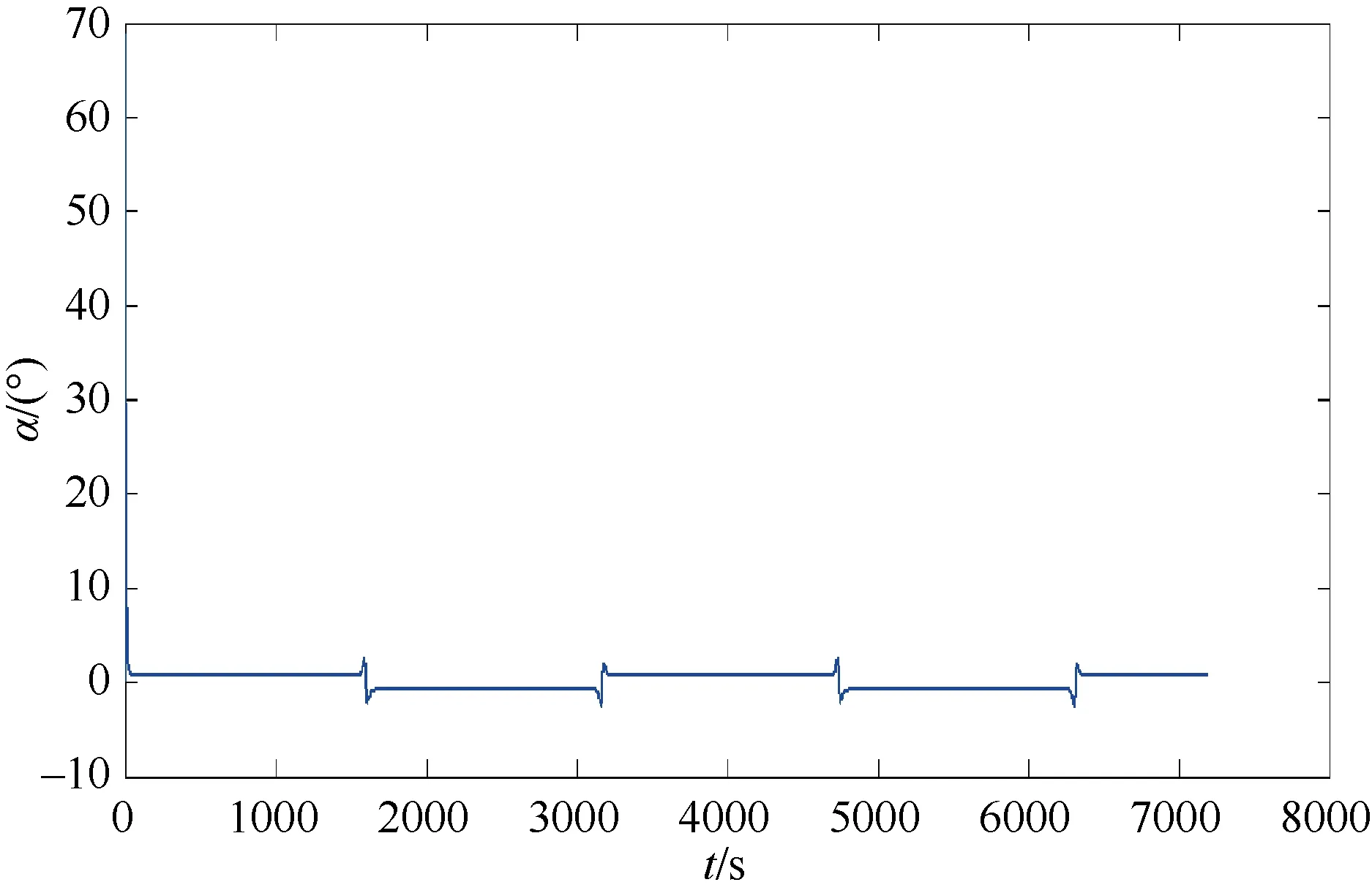
图13 水下滑翔机攻角变化图Fig. 13 AOA variation of AUG
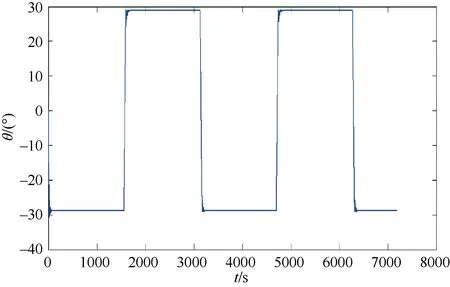
图14 水下滑翔机俯仰角变化图Fig. 14 AOP variation of AUG
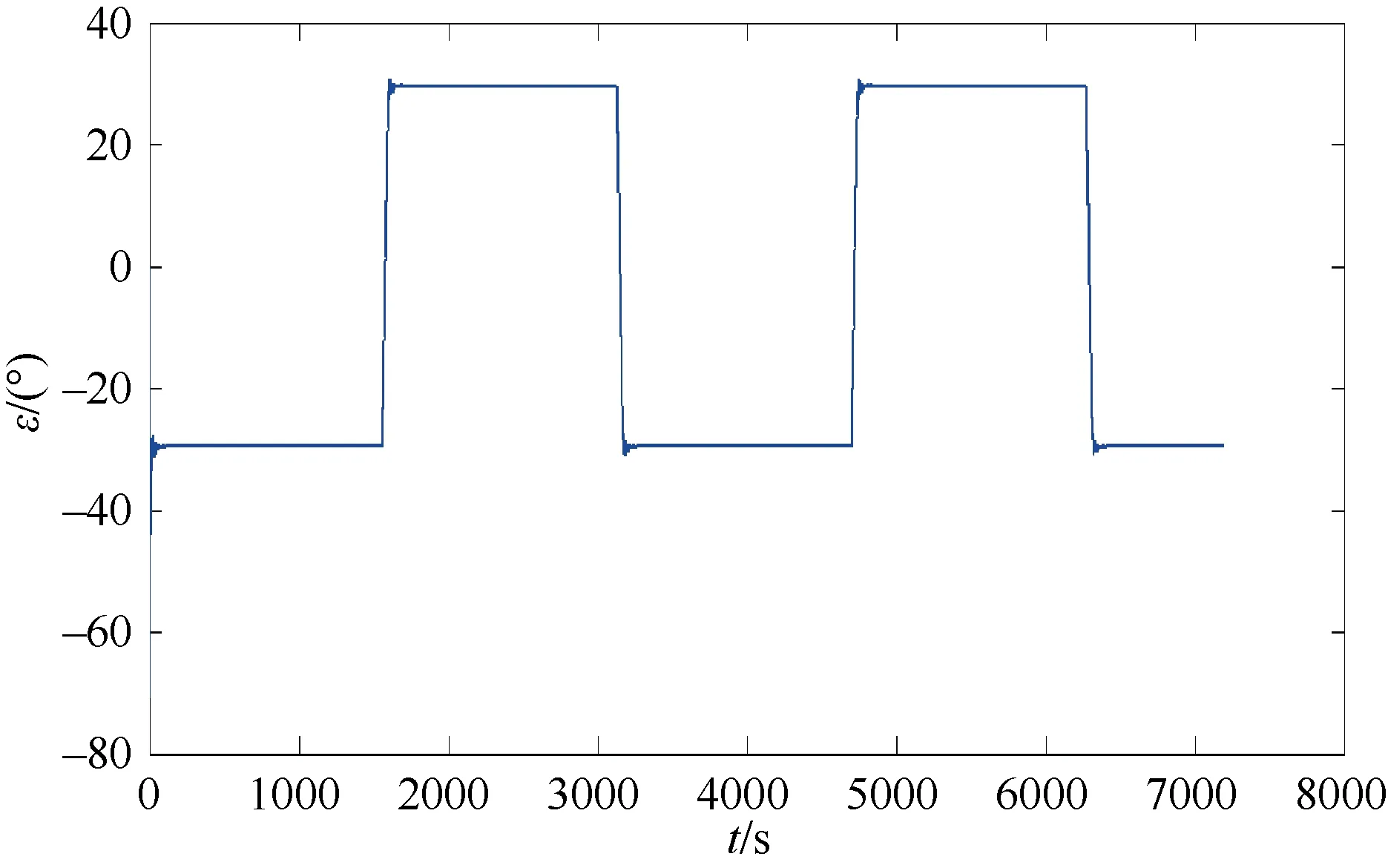
图15 水下滑翔机弹道倾角变化图Fig. 15 Variation of AUG’s trajectory inclination angle
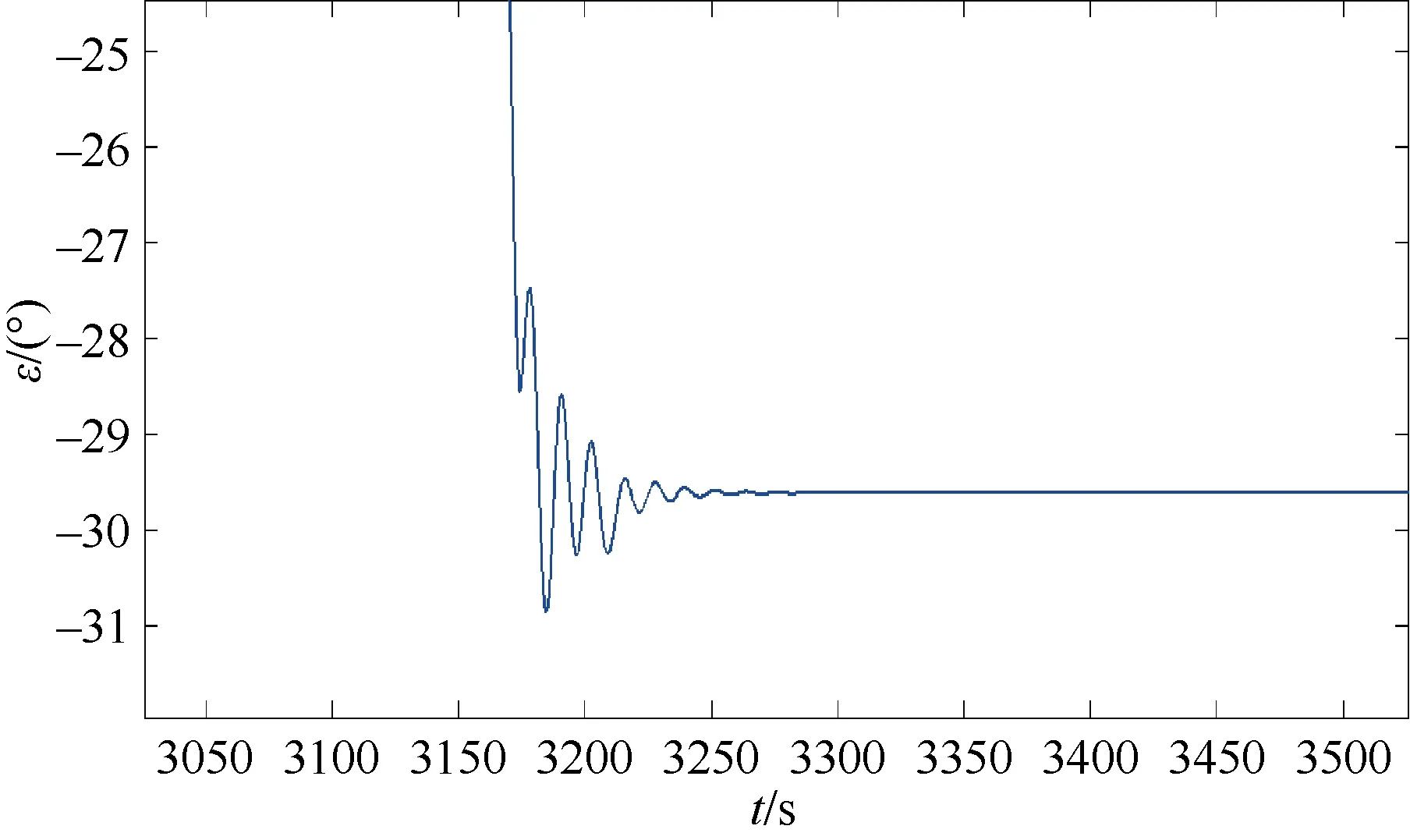
图16 弹道倾角突变处放大图Fig. 16 Amplification and mutation of AUG’s trajectory inclination angle
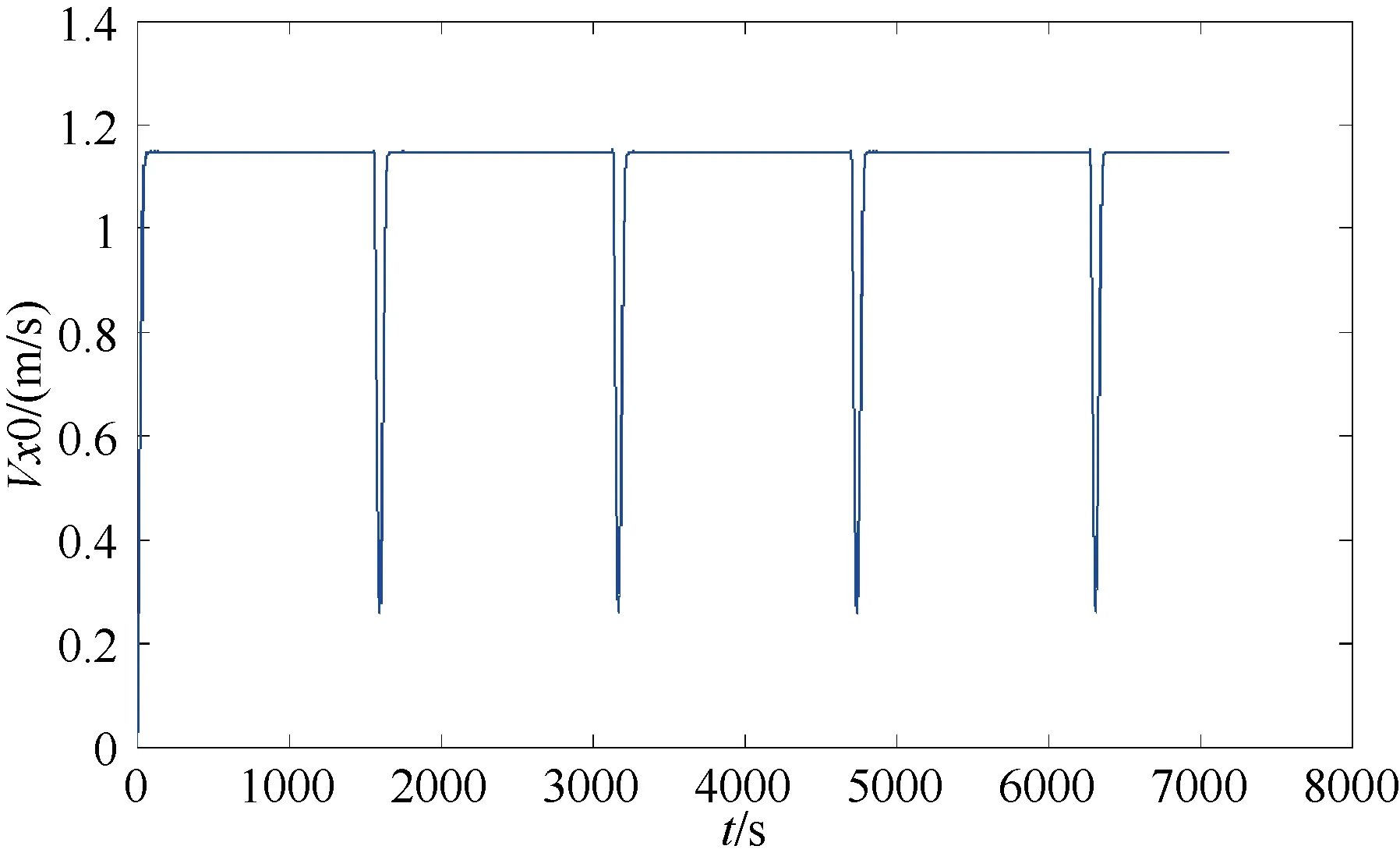
图17 水下滑翔机水平速度变化图Fig. 17 Variation of AUG’s horizontal velocity
5 结束语
本文对水下滑翔机外形进行了设计,完成了滑翔机主要组成系统的布局,对壳体进行了结构设计。另外,利用经验公式完成水下滑翔机流体动力参数计算,同时采用动量定理和动量矩定理对水下滑翔机进行动力学建模。在此基础上,完成对水下滑翔机定常运动特性分析,并将分析结果应用到垂直面内的弹道仿真研究中,仿真结果验证了水下滑翔机总体设计方法的有效性和可行性。
猜你喜欢
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
宇航总体技术(2019年5期)2019-10-11 07:32:56
知识就是力量(2019年7期)2019-07-01 17:33:03
军事文摘(2018年24期)2018-12-26 00:58:00
小学科学(学生版)(2018年12期)2018-12-19 05:13:46
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
少儿科学周刊·儿童版(2015年2期)2015-07-07 03:37:26
振动与冲击(2015年2期)2015-05-16 05:37:34
