
孤岛微网模糊PI下垂控制仿真研究
2020-07-21 07:17何浩宇赵毅君
湖南工程学院学报(自然科学版) 2020年2期
何浩宇 ,赵毅君 ,黄 美
(1.湖南工程学院 电气与信息工程学院,湘潭 411104;2.湖南工程学院 湖南省风电装备与电能变换协同创新中心,湘潭 411104;3.湖南工程学院 风力发电机组及控制湖南省重点试验室,湘潭 411104)
0 引言
在过去的几十年间,分布式发电DG(distributed generation)的应用迅速增加,与传统的集中式发电相比,DG具有安全可靠性高、安装成本低、供电灵活性高等优点.而以分布式发电为基础的微电网,下垂控制作为一种常见控制策略,具有简单可靠、无需机组间通讯协调、负荷即插即用等优点[1],其原理是模拟传统电网中发电机的下垂特性,根据输出功率的变化控制电压源逆变器的输出电压和频率[2].
当微电网处于孤岛运行时,由于负荷随机性、波动性较强,且传统下垂控制中下垂系数固定,导致负荷功率波动下系统输出稳定性较差,因此协调微电网输出稳定电压和频率成为亟需解决的问题.文献[3]提出了一种通过改变参考电压来近似补偿线路差异阻抗上的压降,并采用动态下垂系数调节无功功率的策略,使得微电网无功功率的输出分配精度提高.文献[4]提出了一种以平移等处理后的正弦函数作为下垂控制特性曲线,采用动态下垂系数保证分布式电源出力稳定的控制策略.文献[5]提出了一种改变输出电压设定点的新型下垂控制方法,电压收敛速度增加,但由于各个负载情况不同,其设定点电压会存在差异,各个负载输出电压精度值会受到影响.
对此,本文提出一种改进的下垂控制策略,以传统下垂中下垂系数固定为切入点,通过引入模糊比例—积分(proporion integration,PI)控制,采用实时动态调整的下垂系数策略,通过获取频率与电压的变化来实时整定下垂系数,从而达到稳定输出频率和电压的效果,并从理论上分析了改进控制策略的原理,建立了传统下垂控制模型与改进的动态下垂控制策略模型,通过MATLAB/Simulink平台进行了仿真对比,验证了该改进控制方法的有效性和可行性.
1 传统下垂控制原理
传统下垂控制通过P-f、Q-U的特性曲线进行调节.在孤岛运行情况下,采用下垂控制的微电网按照下垂系数输出相应功率.
如图1所示为含逆变器的简单微网结构图,DG通过线路阻抗Z=R+jX经L连接到负载端,其功率表达式为:

式中:P为有功功率;Q为无功功率;US为逆变器输出电压;U为负载接点处电压;Z为线路阻抗;θ为线路阻抗相角;δ为逆变器输出电压与负载接点处电压相角.
一般来说,由于分布式发电线路阻抗表现为高度感性,即线路X≫R,因此Z=jX,θ=90°,而功率角δ很小,则cosθ≈ 0,sinθ≈ 1,(1)式可以写为:
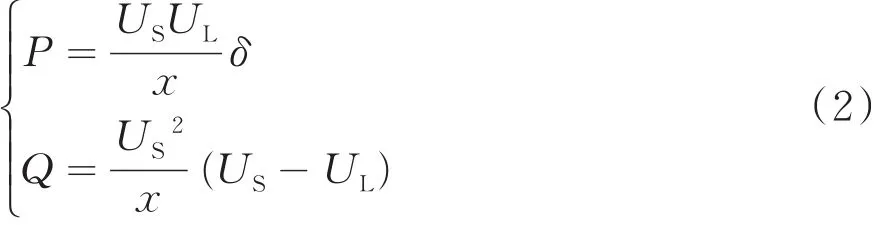
而逆变单元又可通过调节输出频率来控制其相位,即:

由以上分析可得到传统下垂控制方程为:

式中:U和f分别为逆变器的实际输出电压、频率;U0和f0分别为逆变器的额定输出电压、频率;Q0和P0分别为逆变器额定输出无功功率、有功功率;kp和kq分别为电压下垂系数、频率下垂系数.
由式(4)可知,微电网的功率发生变化,逆变器的输出频率或电压也会发生相应变化,其对应变化关系即为如图2所示下垂控制P-f、U-Q曲线图.

图1 含逆变器的简单微网结构图

图2 下垂控制P-f、U-Q曲线图
2 基于模糊PI的下垂控制
2.1 模糊PI下垂控制原理
模糊控制是一种基于规则的控制,适用于非线性、复杂对象,存在鲁棒性好、容错能力强等优点;PID控制也是目前工业中最常用的控制方法,发展已较为成熟.而区别传统PI控制中固定的Kp和Ki参数,模糊PI即为增加了模糊推理规则的PI控制策略,系统根据模糊规则实时调整Kp、Ki参数,使其输出期望值.
如图3模糊PI下垂控制结构图所示,传统下垂控制方式为DG输出经过逆变、RLC滤波后给负载供电,其控制单元通过采集系统电压电流参数后进行功率计算、下垂计算等,最终得到PWM驱动值,驱动逆变单元工作输出期望电压值;而模糊PI下垂方式在传统下垂控制基础上,采集电压和频率的波动,经过模糊推理得到当前电压、频率下的Kp和Ki参数,用于调整并获得此时最优的下垂系数Kp和Kq,使得系统具有更良好的实时性,对于负载波动的敏感性下降,增强了微电网系统的稳定性.
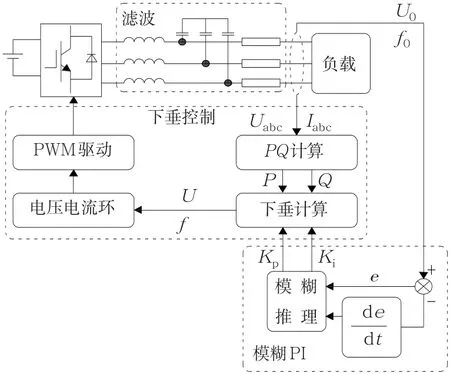
图3 模糊PI下垂控制结构图
为弥补传统下垂控制的缺陷,提高功率分配精度,需要增大下垂系数,而较大的下垂系数会影响系统功率输出范围,较小的下垂系数则影响系统的动态响应速度.本文所提出的实时整定下垂系数的控制器可描述为:
式中:Kpm、Kpn为比例系数,用于控制调节过程的系统响应速率;K1m、K1n为积分系数,用于消除调节过程中的稳态误差.比例和积分系数的分工合作,使系统具有良好的暂态响应特性,增加了微电网系统可靠性,使负荷平稳运行.
2.2 模糊化与模糊推理
模糊控制系统采集输入变量的差值及差值变化率.以频率控制为例,系统采集频率的实际输出值与额定值的差值e和差值变化率ec.其中e和ec的表达式如下:

式中:f为系统输出频率值,fref为输出频率额定值.
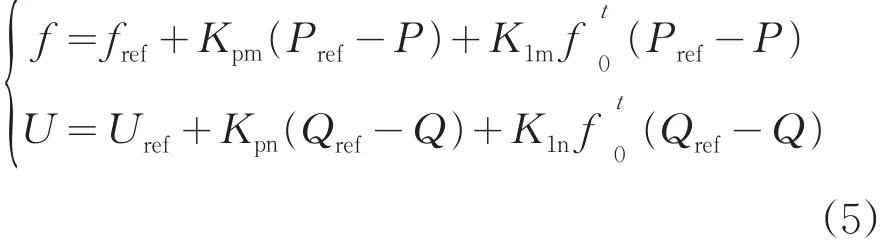
将获取到频率差值e、差值变化率ec进行模糊化处理.取合适的比例因子和量化因子,使模糊控制系统的输入频率偏差ef、频率偏差变化率ecf和输出的下垂控制参数Kp、Ki的基本论域均落在模糊集合{-6,-4,-2,0,2,4,6}范围内,其对应的隶属度函数关系如图4所示.
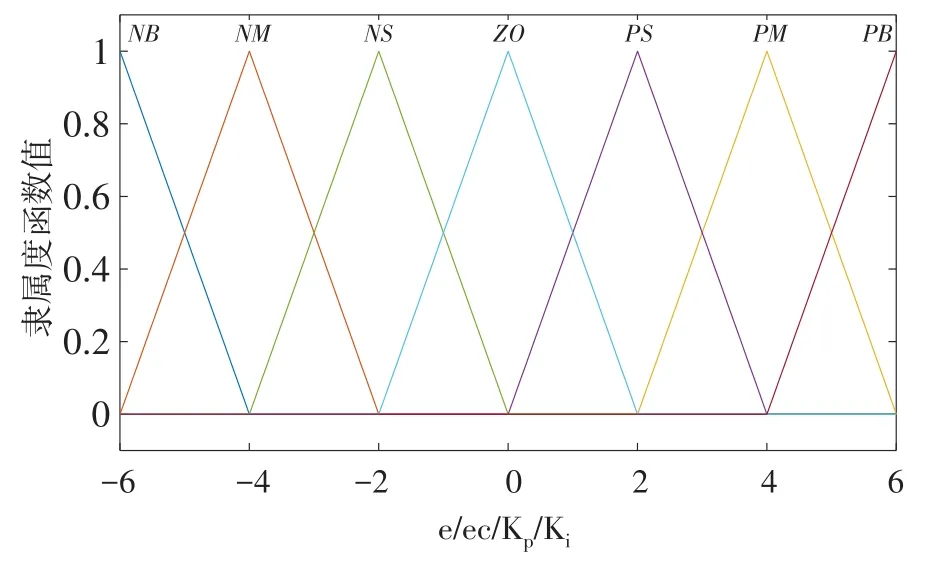
图4 模糊变量隶属度函数图
系统采用Mamdani型模糊推理方法,“if e is A and ec is B then kp/kiis C”的模糊控制规则[6-7].获得频率输入变量ef、ecf经比例因子模糊化后的值,通过模糊规则推理,得到输出变量的模糊值,经过centriod重心法解模糊化即可得到Kp、Ki值.表1所示为Kp/Ki模糊控制规则.图5所示为模糊推理输出Kp曲面图.
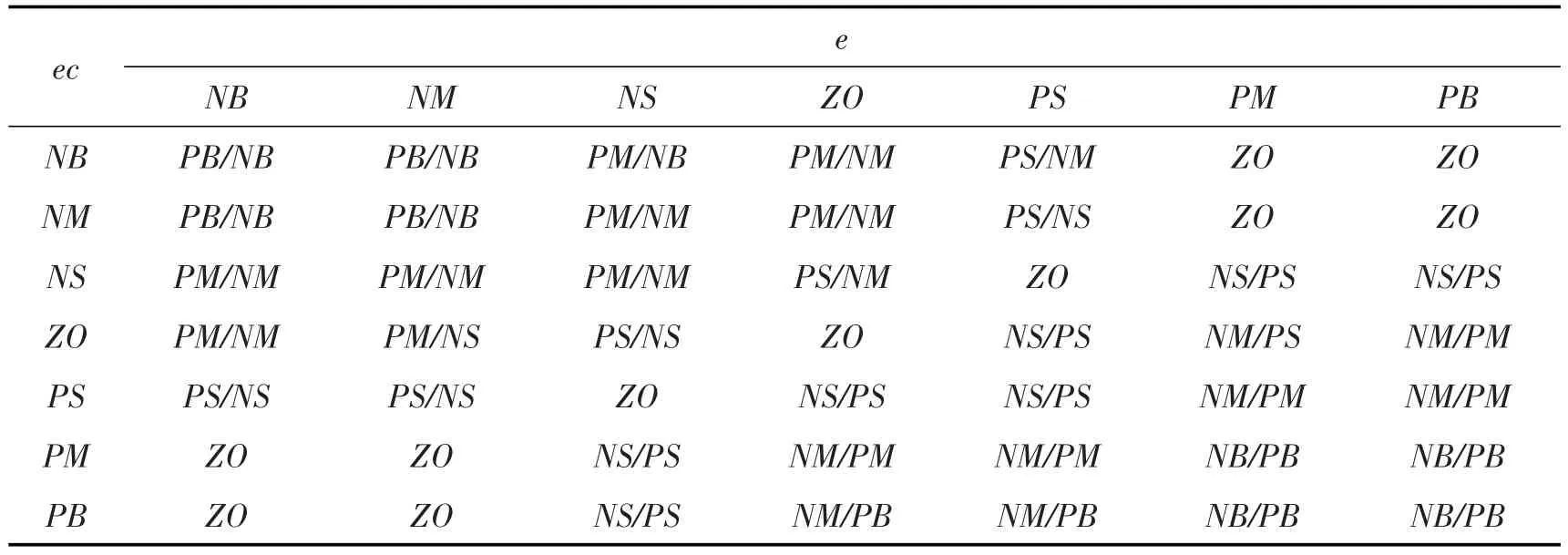
表1 Kp/Ki模糊控制规则

图5 模糊推理输出Kp曲面图
3 仿真测试分析
3.1 仿真模型搭建
在Matlab/Simulink中搭建微电网系统仿真模型如图6所示.系统采用DC800 V直流电源模拟分布式电源,经逆变模块及RLC滤波模块后输出AC400 V电压,为负载进行供电.
图7所示为系统控制子模块图,即图6中的pulse驱动模块展开图,系统采集输出电压电流,通过计算产生对应占空比的PWM信号,即可控制逆变器输出设定的电压及频率值.
图8所示为模糊PI控制模块图,即图7中下垂控制模块展开图,根据式(5)搭建,包含电压及频率两个模糊PI控制器,分别以频率的误差及误差变化率、电压的误差及误差变化率为输入,系统通过功率模块送出的PQ值进行下垂控制计算,经模糊PI计算后得到下垂系数,此下垂系数又是之前下垂计算中参数,如此便构成负反馈结构,使系统输出期望值[8].
系统采用两个相同参数的DG并联,包含电源、滤波器、电压电流环、负载、模糊PI等组件,其各个组件的仿真参数选取如表2所示.
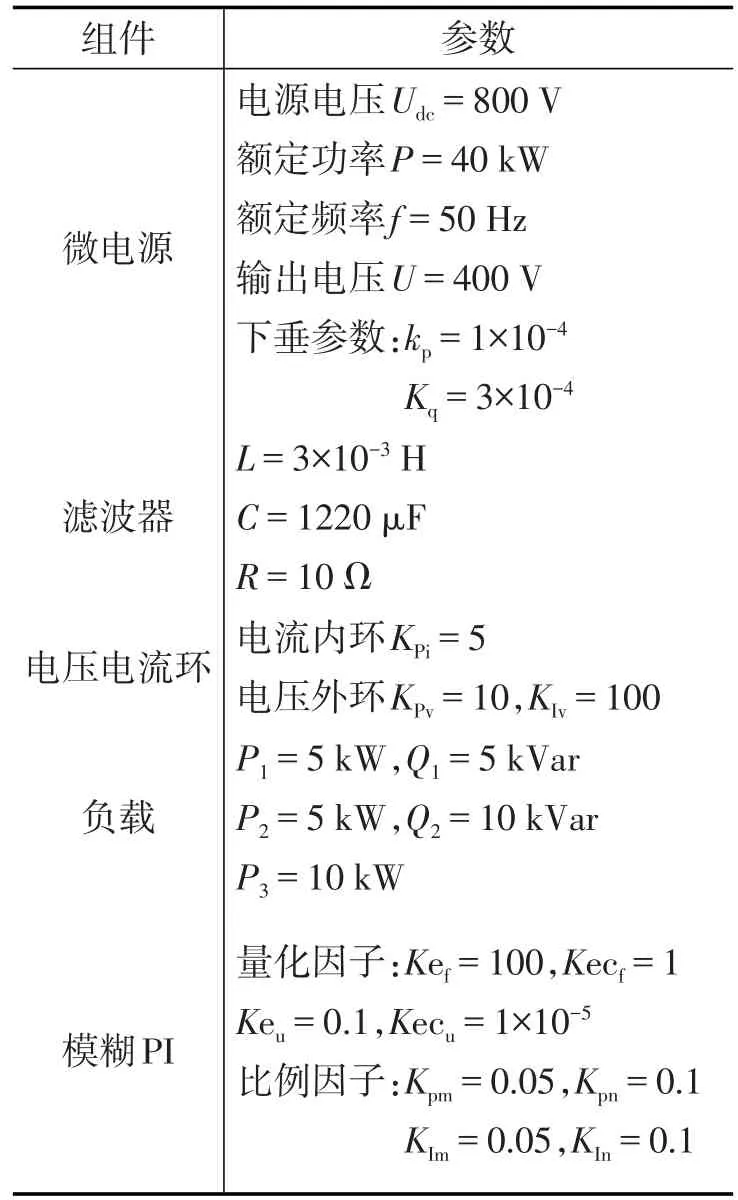
表2 系统仿真参数
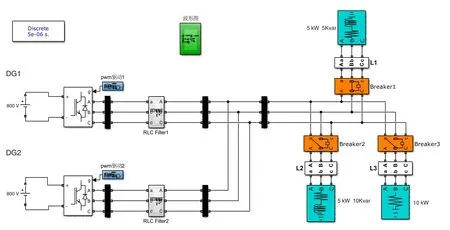
图6 系统仿真模型图

图7 系统控制子模块图
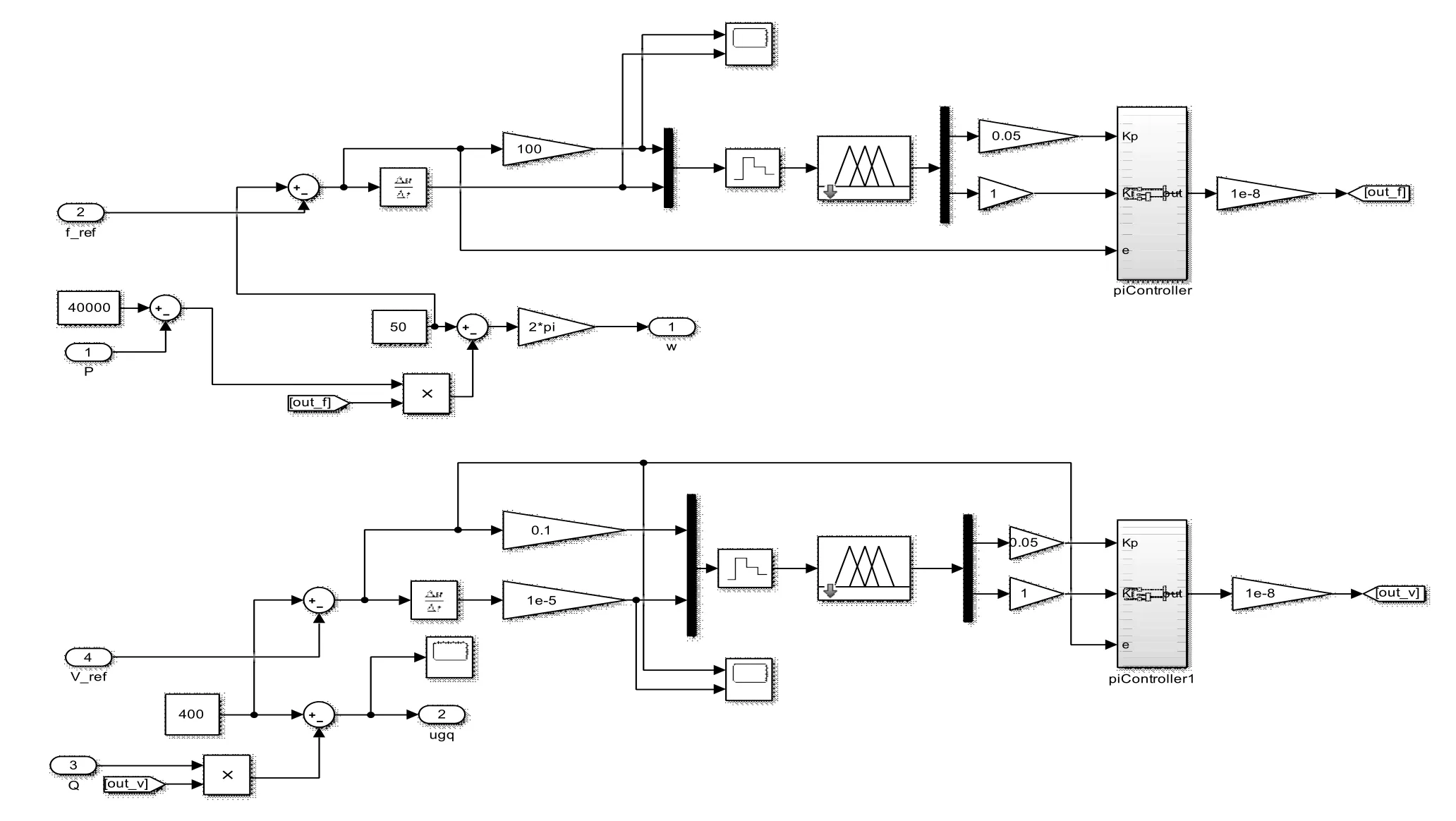
图8 模糊PI控制模块图
3.2 仿真测试
为模拟在微电网负荷波动下,本文所提出改进控制策略的可行性,使用断路器来实现负载功率变化.系统断路器状态及功率值如表4所示.

表4 系统断路器状态及功率值

时间/s 断路器状态 有功功率 无功功率0.1~0.310 kW 0 kVar 0.3~1.0 Breaker1、2断开Breaker3闭合Breaker2、3闭合Breaker1断开15 kW 10 kVar
如图9(a)所示为传统下垂控制功率变化波形,可见当断路器动作时刻,曲线噪声大,功率值波动较高,在t=0.3 s时由于有功和无功功率增加而出现较大冲击;图9(b)为模糊PI下垂控制功率变化波形,曲线在断路器动作时波动起伏小而平滑,较传统下垂控制有明显效果.

图9 (a)传统下垂控制功率变化波形
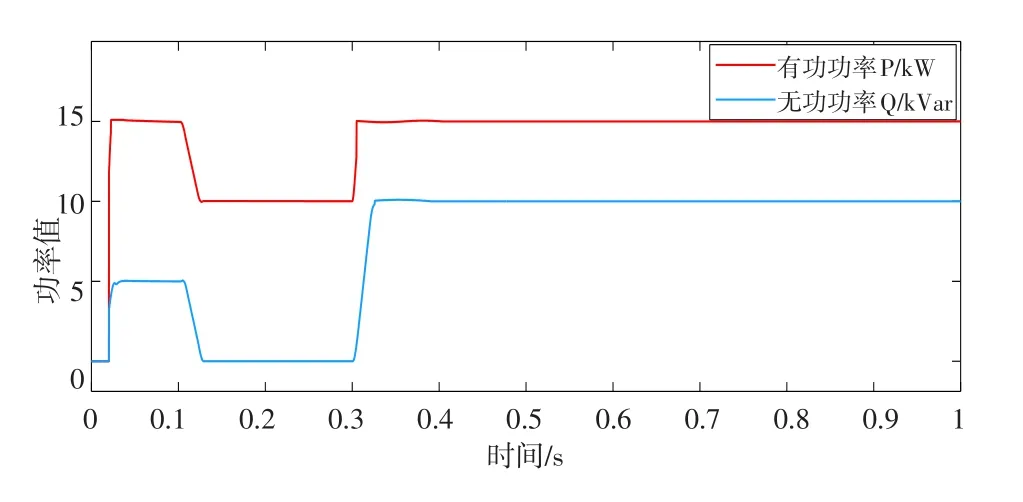
图9 (b)模糊PI下垂控制功率变化波形
如图10(a)所示为传统下垂控制电压波形.由于采用固定下垂系数,t=0.1 s时,无功功率减小了5 kW,其输出电压出现明显上升;t=0.3 s时,无功功率增加10 kW,输出电压出现略微下降.如图10(b)所示为模糊PI下垂控制电压波形,采用实时调整的下垂系数策略,t=0.1 s时电压基本稳定,而t=0.3 s时电压也未见波动,可见采用模糊PI控制实时调整下垂系数值,能够使得电压幅值在负荷功率波动情况下基本稳定.
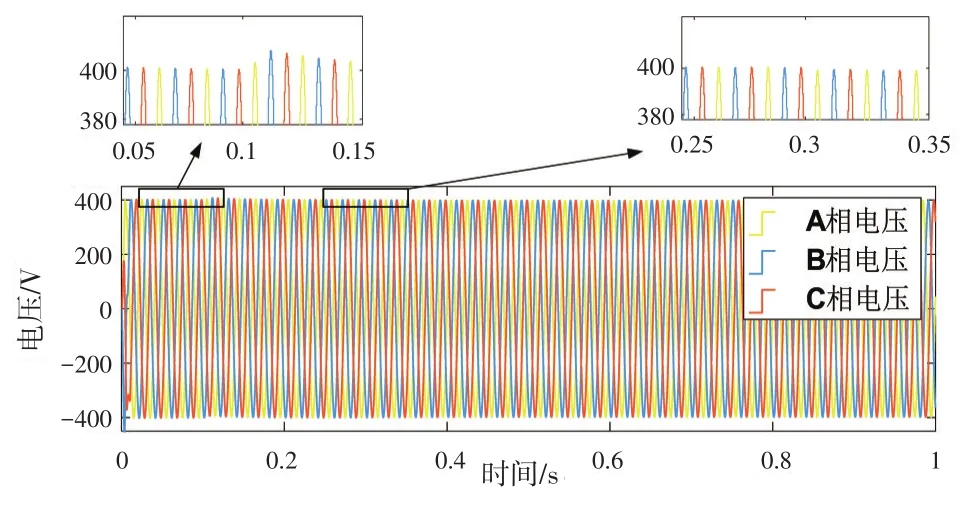
图10 (a)传统下垂控制电压波形

图10 (b)模糊PI下垂控制电压波形
如图11(a)所示为传统下垂控制频率波形图,可见当系统功率变化时,输出频率产生较大波动,且波动时间长、稳定速度慢;图11(b)所示为模糊PI下垂控制频率波形图,当微电网功率变化时,因采用模糊PI下垂控制实时整定下垂系数,输出频率波动较小,且稳定速度快,输出效果基本稳定,符合预期效果.

图11 (a)传统下垂控制频率波形

图11 (b)模糊PI下垂控制频率波形
4 结语
针对传统下垂控制抗负荷波动能力较差的现状,且为了解决微电网对线路参数较为敏感的问题,本文提出了一种基于智能控制的下垂控制策略,引入模糊PI推理方法实时整定下垂系数,用于同时控制孤岛微电网输出频率及电压的稳定性.通过在Matlab/Simulink中传统下垂控制方法和本改进控制方法的仿真对比,仿真结果验证了此改进控制策略能够减小有功功率和无功功率的波动对电压和频率的影响,使孤岛微电网在负荷功率波动情况下,维持电压幅值和频率的输出曲线平滑,抗负荷波动性提高,让微电网系统运行更加稳定.
猜你喜欢
电子技术与软件工程(2022年6期)2022-07-07
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
防爆电机(2020年4期)2020-12-14
今日农业(2019年12期)2019-08-13
中国外汇(2019年23期)2019-05-25
文学少年(原创儿童文学)(2019年1期)2019-05-23
中国化肥信息(2019年3期)2019-04-25
雷达学报(2018年5期)2018-12-05
汽车维护与修理(2018年9期)2018-10-31
