泵站拦污栅清污技术改进分析
2020-07-20 06:54张医娟
山西水利 2020年11期
张医娟
(山西省水利水电勘测设计研究院有限公司,山西 太原 030024)
1 泵站拦污栅概况
为保护水泵叶片的安全,一般在进水流道处设置安全拦污栅,以拦截水流中所挟带的水草、树枝、漂浮垃圾等。水泵机组运行中,拦污栅前聚集的漂浮物过多时,必须及时进行清理,否则越积越多的垃圾会在拦污栅前形成阻碍,抬高泵前水头,影响泵站出力,增加设备损耗,甚至危及泵站正常工作,迫使机组停机处理漂浮物。
原有的清污方式是人工清理,采用长杆工具等方式进行漂浮物打捞,或者设置两道拦污栅,轮流起吊,进行漂浮物清理,效率非常低。拦污栅一般位于站身下部,远低于工作桥的高度,人工清污时,施工环境不安全,易发生安全事故。为提高清污效率,拟对原拦污栅进行技术改造,增加自动化清污设备。经综合评价,采用回转式清污机最为经济和高效。
回转式清污机是一种高效的河道清污设备,其工作原理为:在拦污栅体拦住河道内的漂浮物后,机上自带的动力系统,带动栅顶部中间轴旋转,通过中间轴上的链轮带动牵引链条,牵引链条在固定轨道内回转运动,附在链条上的耙齿将栅体前的漂浮物捞起,当耙齿旋转到顶部,转过来时,漂浮物在重力作用下落到皮带输送机中,缠附在耙齿上的杂物在经过刮齿装置后落下。齿耙继续在栅体后部下降,从底部回转至栅体前部继续捞污。
2 清污设备的改造
2.1 拦污栅改造
拦污设备的改造需要在拦污栅底部开旋回槽,以便让拦污耙齿从后部旋转至栅体前面。同时取下拦污栅体,在栅体框架两侧增加支座,从而使这部分的栅体位置前移,作为前置栅体拦住底部漂浮物,详见图1。
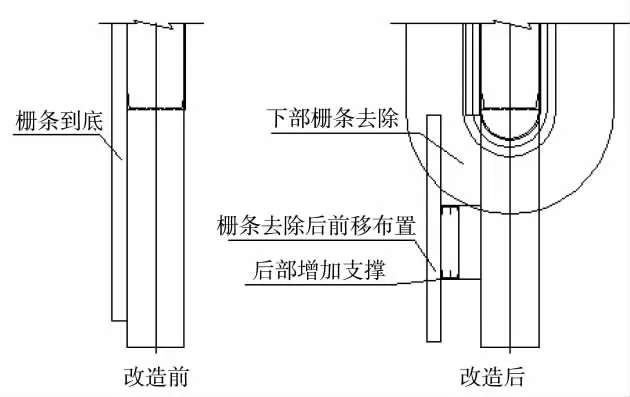
图1 改造前后栅体位置对比图
2.2 拦污栅牵引动力装置
拦污栅两侧最边的栅条应根据情况去除,以便在栅体前后布置链条的运转轨道。在栅体两侧齿耙下各附加一根牵引链条,通过链条的运动实现齿耙在栅体前部自下而上运动,从而将栅体上附着的漂浮物提升至工作桥面。则链条在栅前后运动时需要在同一轨道内运动。改造方案是预先制作C型轨道,然后通过螺栓将C型轨道定位在拦污栅的主梁之上,详见图2。
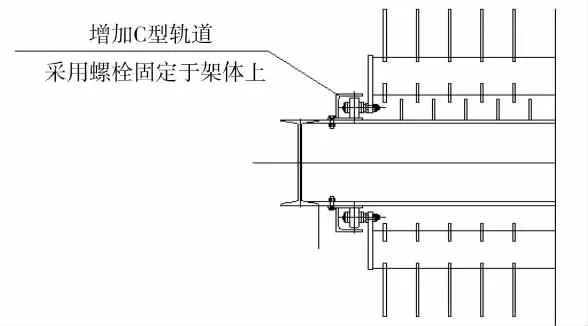
图2 C型轨道定位安装图
2.3 拦污栅顶部运转机构设置
在拦污栅顶部增加一节运转机构,运转机构内带有驱动装置,驱动部分通过一根传动链条,将动力传递到顶部的中间轴上,通过固定在中间轴上的牵引链轮带动牵引链条的运动,最终实现齿耙的捞污功能,详见图3。

图3 齿耙捞污运转结构简图
2.4 漂浮物打捞耙齿设计
因拦污栅均为90度的垂直设置,所以对于打捞漂浮物的耙齿,需要进行特殊设计。单个清污设备的宽度应以4m为界,当在4m以内时,单面拦污栅应设置一组清污设备;当大于4m时,需要对单面拦污栅左右并排设置2组耙齿。从经济实用性考虑,当跨距过大,为确保齿耙强度足够,必然加大齿耙材料投入。且大跨距增加了链条滑出轨道的风险。耙齿的齿形应为组合式,以便应付不同种类的漂浮物。耙齿分为普通型和带钩型,同时前齿上翘5°~10°,以防止漂浮物滑落,详见图4。
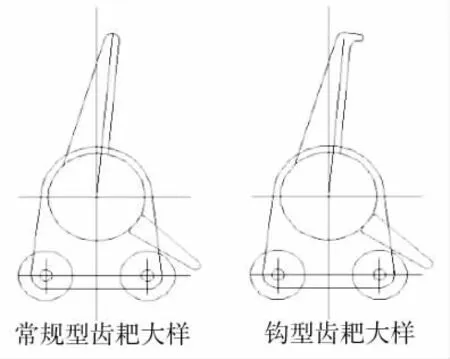
图4 齿耙大样图
2.5 刮污装置
增加刮污装置,目前河道内的垃圾种类繁多,有诸多的带状物体,在齿耙捞起漂浮物时会缠绕在齿上,当齿耙翻转后,大部分漂浮物依靠自重落下,少量缠绕在齿上的漂浮物不能脱落,被带入栅体后部,为防止这种情况的出现,必须增加刮污装置。刮污装置上设有反齿,当齿耙经过时会将缠绕在齿上的漂浮物挑落,详见图5。

图5 齿耙清污装置图
2.6 土建部分改进
为给回转齿耙后部回转提供空间,在工作桥面位置必须将土建基础上干涉的部分去除,详见图6。

图6 土建改进部分图示
3 结语
通过以上改进,可在保有原拦污栅及栅槽结构的基础上,增加自动清污装置,并通过附属增加自动监测和控制系统以达到智能化自动清污的效果,自动化程度越高、分离效果越好、动力消耗越小、无噪音、耐腐蚀性能越好,在无人看管的情况下可保证连续稳定工作。同时还设置了过载安全保护装置,在设备发生故障时会自动停机,可以避免设备超负荷工作,根据运行需要任意调节运行间隔,实现周期性运转,根据格栅前后水位差自动控制,并且具备手动控制功能,方便检修。由于该设备结构改进合理,具有很强的自净能力,不会发生堵塞现象,所以日常维修工作量少,清污的效率大大提高,并可以实现在不停机的同时也能将漂浮物清理干净。
同时可以对设备进一步优化,大部分拦污栅的栅条部分原有的固定方式为焊接式,直接焊接固定在框架上,可将其改为组合栓接式。先将几根栅条编为一组,焊接成独立的栅条架,再通过螺栓将栅条架固定于框架上,当部分栅条发生损坏时,可不用停机,不用吊出设备,直接在栅面上拆卸该栅条架,局部进行更换,从而提高了设备的使用效率。
猜你喜欢
智慧少年(2022年7期)2022-06-24
小资CHIC!ELEGANCE(2021年46期)2021-01-11
科学导报(2020年39期)2020-06-21
中国自行车(2020年2期)2020-04-26
当代陕西(2019年13期)2019-08-20
船海工程(2019年3期)2019-07-03
汽车实用技术(2018年20期)2018-10-26
北京汽车(2017年4期)2017-10-13
科技资讯(2017年8期)2017-05-18
汽车维修与保养(2015年8期)2015-04-17