5G 边缘计算和网络切片技术在AGV 上的应用*
2020-07-19 14:28张懿卿
通信技术 2020年6期
张懿卿,沈 鸣
(中国电信股份有限公司上海分公司,上海 200003)
0 引言
随着移动互联网的迅猛发展,人们对网络的需求大幅度增加。从大带宽的互联网接入需求,到大规模的物联网需求,这些需求不断推动着移动互联网的发展。传统的4G 技术已经不能满足人工智能和物联网的要求,5G 技术逐渐成熟。在2018 年初,政府工作报告指出:“全面实施战略新兴产业发展规划,加快新材料、人工智能、集成电路、生物制药、第五代移动通信技术研发和转化,做大做强产业集群。”同年4 月22 日,工信部发布《5G 发展前景及政策导向》,提出:“我国5G 将在2019 年下半年初步具备商用条件。”2019 年6 月10 日,中国正式颁发5G 牌照,5G 至此开始大规模商业化。
5G 标准包括增强型移动宽带(enhanced Mobile BroadBand,eMBB)、海量机器类通信(massive Machine-Type Communication,mMTC)和超可靠低和延迟通信(ultra-Reliable Low Latency Communication,uRLLC)3 种应用场景,理论极限带宽可达10 Gb/s,时延最低支持1 ms,连接数最大支持1×106个/km2。其中,eMBB 主要针对虚拟现实、超高清等服务,mMTC 主要针对物联网,uRLLC 主要针对工业制造、车联网和人工智能等场景。
由于当前的4G 技术并不支持超低时延和海量连接,因此无法适应工业制造和物联网行业的发展。特别是在AGV 领域,对于低时延的要求较高。因此,目前AGV 的行驶路线一般事先规划,利用地磁、超声波等手段进行无人驾驶,无法实现远程实时高清监控和远程操控。而5G 将对AGV 使用方式带来巨大变化,5G 的边缘计算和网络切片将很好地解决这些问题。
边缘计算是指在靠近物或数据源头的一侧,采用网络、计算、存储以及应用核心能力为一体的开放平台,就近提供最近端服务[1]。因此,边缘计算可以降低网络传输的时延。而网络切片通过网络虚拟化技术,将网络中的各类物理资源抽象成虚拟资源,并基于指定的网络功能和特定的接入网技术,按需构建端到端的逻辑网络,提供一种或多种网络服务。通过边缘计算和网络切片的手段,可以为AGV 提供超低时延的计算能力,使AGV 的实时高清监控、远程操控成为可能。
1 边缘计算和网络切片技术
1.1 边缘计算和网络切片技术
边缘计算或多接入边缘计算(Multi-access Edge Computing,MEC)是在无线接入网(Radio Access Network,RAN)内提供IT 和云计算的能力[2]。边缘计算通过将小型的计算能力如计算、存储甚至PaaS 能力部署在近用户侧,使用户能够低价、快速地使用相关的能力,满足业务实时性的需求。例如,无人驾驶对数据的实时性要求非常高,如果计算资源位于离用户较远的云资源或者IDC,无人驾驶可能无法正常工作[3]。
此外,随着物联网行业的发展,对于计算资源的需求也越来越大。如果所有对计算资源的请求全部通过离用户较远的核心云资源池或者数据中心来处理,会造成大量的带宽资源消耗,可能导致计算服务的时延增大甚至不可用。边缘计算则可以将这些请求在本地进行处理,提升服务的可用性。
5G 的网络切片技术和4G 不同。在4G 网络中,传输通道是同一个,尽管可以通过QoS 等手段对重点业务进行高优先级传送,但如果整个通道发生拥塞,如用户接入数量超过网络容量,则可能发生通信困难等情况。5G 的网络切片与4G 不同,可以将物理的网络划分成若干个互相独立的逻辑网络,根据业务对网络性能要求的不同,可以按需形成不同性能的互相独立的、端到端的网络通道。
5G 的网络切片主要通过SDN、NFV 等技术手段实现网络的控制平面与数据平面分离以及软硬件解耦。根据业务需求不同,可以创建多种不同类型的网络切片,每一个网络切片可以部署多个切片实例,每一个切片实例也可以服务多个切片。基础的网络切片种类有eMBB、uRLLC 和mMTC。
网络切片与QoS和VPN技术的比较如表1所示。
1.2 AGV
自动引导车(Automated Guided Vechile,AGV)是一种利用充电电池作为动力,实现动力自动引导的无人驾驶汽车。AGV 的核心系统主要由车载控制和管理监控两大系统组成。车载控制则由感知层、操作系统层和应用管理层组成[4],如图1 所示。

表1 网络切片与QoS 和VPN 技术的比较
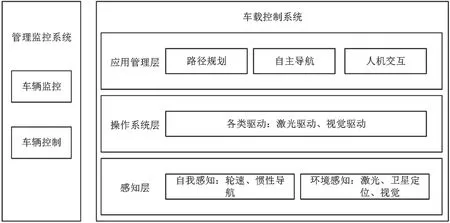
图1 AGV 核心系统结构
其中,感知层包括自我感知和环境感知两部分。自我感知主要是轮速、惯性导航感知,环境感知主要通过激光、视觉和卫星定位感知。操作系统提供感知层设备的各类驱动。应用管理层包括路径规划、自主导航和人机交互。管理监控系统则包括车辆监控和车辆控制两部分。
1.3 边缘计算和网络切片技术在AGV 的应用模式
利用边缘计算和网络切片技术,AGV 可以将大量的计算工作通过边缘计算来完成,以有效降低单台AGV 的成本。它的应用模式由基于uRLLC 的网络切片叠加边缘计算组成。
2 基于边缘计算和网络切片技术的AGV 的具体应用
2.1 边缘计算和网络切片技术在AGV 的应用
边缘计算和网络切片技术在AGV 的应用框架如图2 所示。
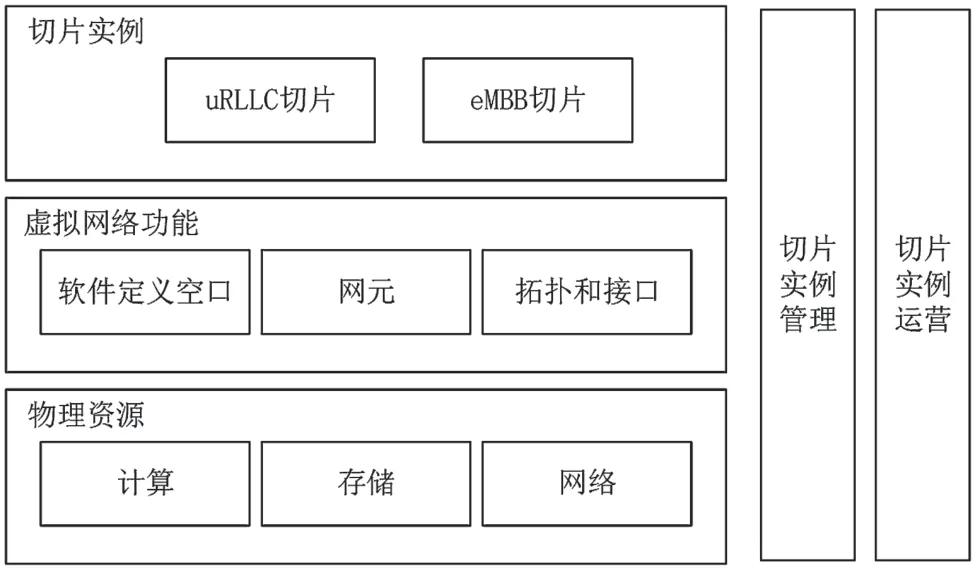
图2 边缘计算和网络切片技术在AGV 的应用框架
通过切片实例管理,生成uRLLC 切片和eMBB切片,并通过切片实例运营进行计费和实现用户自运营。AGV 的相关业务接入到uRLLC 切片,其他业务统一接入eMBB 切片。在每个不同的网络切片中,部署所需要的虚拟网络功能,包括软件定义空口、相对应的网元及拓扑和接口[5]。特别的,在AGV 业务所在的uRLLC 切片实例中部署本地MEC,包括所需求的计算、存储和网络资源。
2.2 基于边缘计算和网络切片技术的AGV 应用方案
上海电信基于边缘计算和网络切片技术的AGV应用方案如图3 所示。
利用网络切片技术,核心网的切片管理器将部署两个切片实例,分别为eMBB 切片和uRLLC 切片,并在uRLLC 切片实例中开通MEC 中的对应计算资源[6-7]。AGV 业务使用uRLLC 切片实例,其他业务使用eMBB 切片实例。在人流较多的大型工业园区,由于普通终端接入的需求较多,可以采用逻辑隔离、物理共享宏站和室分的方案,节约部署成本。如果普通终端接入较少或者AGV 业务量较大,这两个切片可以各自物理独享宏站和室分。室内基带处理单元(Building Base band Unite,BBU)和用户面功能(User Plane Function,UPF)部署在近用户侧的机房,MEC 可以同样部署在近用户侧的机房或者直接部署在用户机房。
对于AGV 的应用流量,如图3 下方虚线所示,通过uRLLC 切片实例,近用户侧机房内的UPF 会将流量转发至MEC 应用服务器或者MEC 应用平台,实现边缘计算,达到低时延的效果。对于其他流量,如图3 上方虚线通过eMBB 切片实例,近用户侧机房内的UPF 会将流量转发至核心网的UPF,再转发至Internet[8]。
网络切片和边缘计算相对于Wi-Fi 和4G 边缘计算的对比如表2 所示。
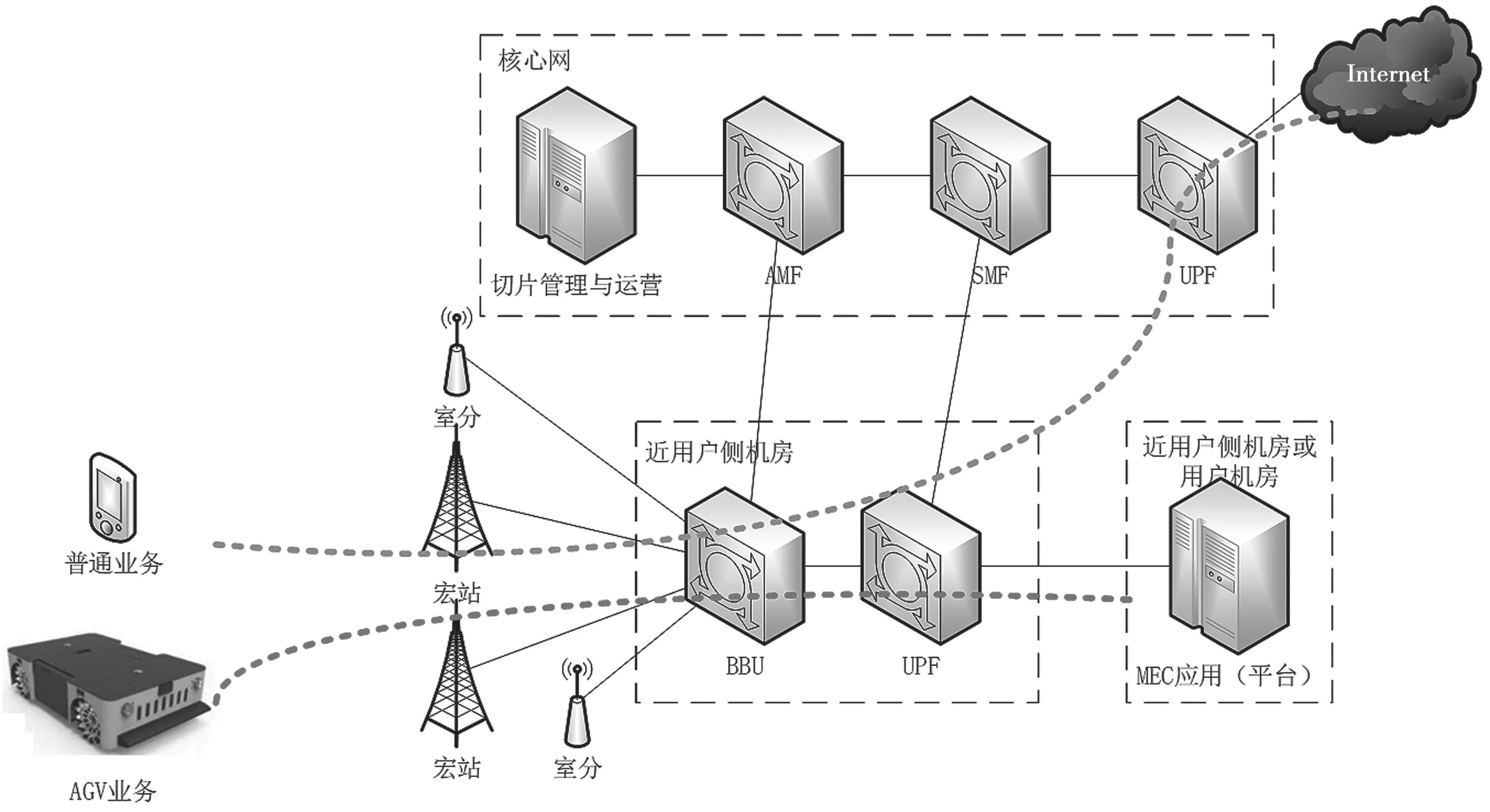
图3 基于边缘计算和网络切片技术的AGV 应用方案

表2 网络切片和边缘计算与Wi-Fi 固网和4G 边缘计算的比较
由于AGV 移动的特性,相对于Wi-Fi 或者固网接入的边缘计算,采用5G 的网络切片和边缘计算方案在不增加网络延时的同时,大大增强了整个系统的可靠性。而4G 网络无法将核心网功能如用户管理部署在用户侧,因此只能采用非法的解决方案在用户侧部署边缘计算服务,将导致计费、安全等一系列的问题[9]。另外,4G 网络并不支持网络切片技术,因此接入用户过多,引起网络拥塞,可能导致AGV 业务不可用。
2.3 基于边缘计算和网络切片技术的AGV 方案可行性分析
首先进行信号覆盖,室外通过宏站、室内通过室分的方式进行。其次,在传输部分,宏站提供25G eCPRI 双芯光模块,双芯光纤前传。室分提供10G eCPRI 双芯光模块,双芯光纤前传。A 路由器采用10GE 双芯光模块,双芯光纤传输方案进行回传。考虑到系统的可靠性,需要部署2 台A 路由器。MEC 平台部分需要部署至少2 台x86 服务器进行平台和应用部署。最后,在AGV 方面需要改造其软件,通过操作系统将传感器数据传送至MEC 平台,并执行MEC 下发的操作指令。
本方案的不足之处在于,由于5G 技术仍在发展阶段,因此部署成本较高。例如,UPF 的成本近百万,需要通过共享UPF 的方式降低边缘计算的成本。另外,由于之前无线通信技术的限制,目前的AGV 基本采用单体计算方式,对AGV 进行云化改造虽然能大大降低单机成本,但改造可能产生较高的成本。
2.4 AGV 应用及效果分析
基于边缘计算和网络切片技术的AGV 方案,目前在宝钢滩涂一期仓库已经联合宝钢集团对AGV进行了相关改造,增加了视觉感知。AGV 车辆运用5G、人工智能和自主感知等技术,从设备层、感知层、融合层到决策层构筑4 层无人驾驶车辆作业管控系统,车辆的运行参数、动作、周围环境都能通过5G 网络实时与自动调度系统对接。最后,AGV系统与无人行车系统、仓库管理系统等的对接,能保证工作任务的自动创建、分配和执行,能实现AGV 车辆、框架的自动调度和配备,能有效协调各个仓库之间和码头之间的运转,提升运输效率。
3 结语
传统的Wi-Fi 和4G 网络无法解决单体AGV 运算量较大、成本较高的问题,而边缘计算和网络切片是5G 标准中提升网络性能的重要手段,可以将AGV 的计算部分在边缘计算节点完成,降低成本。本文提出了基于边缘计算和网络切片技术的AGV方案,很好地实现了可靠的边缘计算,并分析了使用效果。随着5G 技术的不断推进,成本不断降低,云化AGV 是未来AGV 领域的发展方向。相信网络切片和边缘计算技术会在AGV 领域发挥更大的作用。
猜你喜欢
通信电源技术(2020年8期)2020-07-21
科学与财富(2020年15期)2020-07-04
移动通信(2020年4期)2020-05-07
探索科学(学术版)(2020年1期)2020-03-26
移动通信(2019年4期)2019-06-25
电子制作(2019年23期)2019-02-23
现代信息科技(2018年4期)2018-07-12
现代防御技术(2016年1期)2016-06-01
高中生学习·高三版(2014年3期)2014-04-29
高中生学习·高三版(2014年3期)2014-04-29